









Deep Learning Based Registration文章阅读(十六)
本次论文是2021.7月的文章,挂在arXiv,笔者还不知道发在了哪里,投的应该是IEEE Trans期刊,题目《NccFlow: Unsupervised Learning of Optical Flow With Non-occlusion from Geometry》。这篇文章的贡献是在non-occlusion的区域引入了几何约束,从而提升光流估计的准确度。在之前的无监督光流估计的工作中,引入了亮度一致性损失,但是亮度一致性在occlusion区域是不满足的,从而一些工作会focus在准确估计occlusion区域,剔除掉occlusion区域的像素再计算亮度一致性。这篇工作是在剔除掉occlusion区域的基础上,在non-occlusion区域引入几何一致性约束,文中也提到,这应该是首次在non-occlusion区域引入几何一致性。
文中的框架是在PWC-Net基础上进行修改,并大量借鉴SelFlow和DDFlow的sense,然后重点就是基于对数据的观察提出了两个损失non-intersection loss和non-blocking loss。
Observed priori knowledge

如上图所示,对于非occlusion区域 (图b),下一帧的对应像素与上一帧的对应像素所连向量不会有交叉,且对于上一帧4个像素所形成的凸四边形,在下一帧中构成的凸或者凹四边形中,没有上一帧4个像素所形成的凸四边形的外部像素侵入进来。对于occlusion区域则不满足这些约束。但是也有极端实际情况不满足这些约束,但数据集中这种情况十分少见。例如下面两个例子:

如上图所示,上面的例子是不满足non-intersection约束的情况,原因是因为occlusion的过程由于“车速”太快,在sensor捕获的相邻两帧的时间差内已经完成了。

上图是不满足non-blocking约束的例子,原因是因为,两个不连续的物体(两个车)在相邻边界附近形成的凸四边形,会因为其他物体(行人)的insert,而使得non-blocking约束不满足。
Non-intersection loss

如上图所示,它是通过3*3的local window来实现non-intersection loss的计算,因为全图pixel2pixel的计算复杂度太高。

由于在边界位置容易发生occlusion,而在内部平坦的位置不容易发生,所以引入了一个和边界有关的权重来加权non-intersection loss。具体计算如上图所示。

上式在计算交叉程度,会作为下式exp的负指数项,下式的sigma笔者不清楚具体是什么,猜测是sigmoid函数。上式其实是在计算两个向量的外积,又根据右手螺旋定律,上式中的行列式为正值,所以物理意义是两个向量为边构成的平行四边形的面积。第三行也是一个外积。比例就是交叉点在各自对应向量的长度比,来体现交叉程度。

但是笔者这里有一点不太理解:按照上式的定义,下图两个例子交叉程度还是不太一样,但是对loss的贡献应该是一样,感觉不太make sense。

Non-blocking loss

上图是non-blocking loss计算过程,取得4*4 local window。a图和b图分别是经过光流后,上一帧的四边形ABCD变成凸和凹四边形的情况,要判断外面的点P1-P12是否进入了ABCD内部,在凸四边形时候只需要判断Pi是否在任意一个对角线划分为的两个三角形之一的内部即可,但是在凹四边形的时候,需要判断两次两条对角线划分的两个三角形,即下下式子。下式也是外积形式,结合右手螺旋定律来判断P点在对应三角形三条边的哪一侧,如果都在同侧,则P点在该三角形内部。


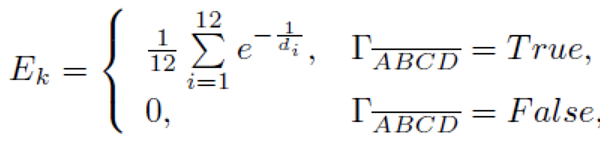
最后,上式根据P点到ABCD的城市距离来做exp加权。















 3111
3111











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









