







成就更好的自己
目录
引言
先说问题,这几天在使用STM32H750调试程序的过程中出现了一些问题,博主使用下载用CubeMX初始化好的程序后,程序不执行,表现为以下几个状态:
- 简单的点灯程序不运行;
- 程序均可通过各种方式(DAP,STLINK,JLINK,UART,USB)下载成功,也可以进行Keil的硬件在环Debug;
- 所有GPIO引脚高阻态,对地电压1.5V左右;
- Keil的硬件在环Debug可以进行,并不会提示找不到连接,但是Debug界面开始调试时并不是通常那样开始就是自己写的代码,而是一个.s启动文件,而且在单步执行后,调试进度卡死;
- BOOT0与RESET引脚电平正常;
- 通过FireDAP与STM32CubeProgram可以读取到片内Flash程序并且与文件校验一致;
- 通过STM32CubeProgram读取到芯片并没有被锁死;
- 例程可以运行且调试正常;
看到这里的朋友不知道能不能猜出问题在哪,综上所述已经能完全排除芯片问题,下载器问题,经过长时间的工程文件对比后,发现了一个极不起眼的小问题;
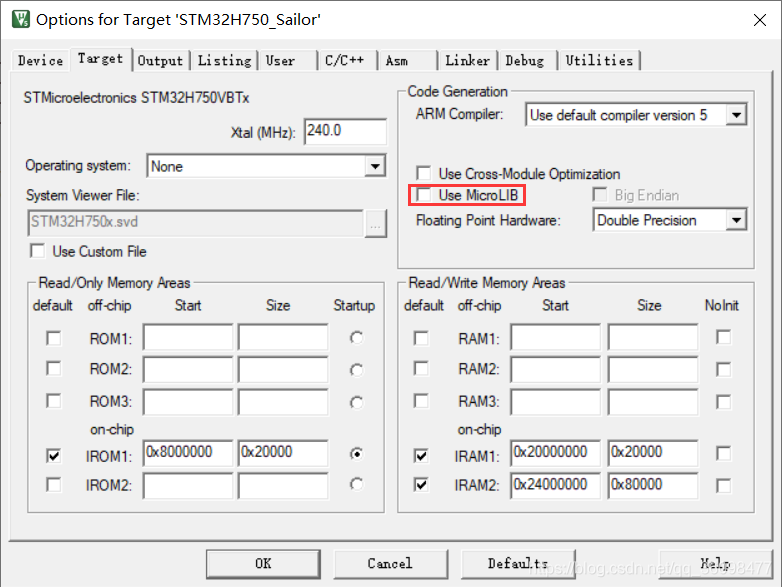 Use MicroLIB没有被勾选,然后勾上程序就TM运行了。
Use MicroLIB没有被勾选,然后勾上程序就TM运行了。
问题是解决了,但是不能这么死的不明不白,于是深入了解并学习一下MicroLIB。
什么是MicroLIB
来自ARM-MDK官网的解释:
MicroLib 是一个高度优化的库,适用于用 C 编写的基于 ARM 的嵌入式应用程序。与 ARM 编译器工具链中包含的标准 C 库相比,MicroLib 提供了许多嵌入式系统所需的显着代码大小优势。
MicroLib 和标准 C 库之间的主要区别是:
- MicroLib 专为深度嵌入式应用而设计。
- MicroLib 经过优化,可以使用比使用 ARM 标准库更少的代码和数据存储器。
- MicroLib 设计为无需操作系统即可工作,但这并不妨碍它与任何操作系统或 RTOS(例如 Keil RTX)一起使用。
- MicroLib 不包含文件 I/O 或宽字符支持。
- 由于 MicroLib 已经过优化以最小化代码大小,因此某些函数的执行速度将比 ARM 编译工具中可用的标准 C 库例程更慢。
- MicroLib 和 ARM 标准库都包含在 Keil MDK-ARM 中。
- 有关更多详细信息,请参阅与默认 C 库的差异。
详细参考网址:https://www.keil.com/arm/microlib.asp
说这么多也没有什么实质作用,网上大多数资料也没有说到点子上,我结合实际开发总结一下真正跟咱们有关系:
- 使用MicroLIB,简化嵌入式开发操作,例如你用printf()函数的时候,就会从串口1输出字符串,当然也可以重定义到其他串口;
- 使用MicroLIB会优化代码空间,但会降低某些程序的执行效率(比如: memcpy()),效率换空间;
- 由于MicroLIB不支持浮点运算,所以在有FPU单元的MCU上,使用MicroLIB并开启FPU会让程序死机或跑飞。
- Microlib不支持C++,在使用C++开发MCU时,首要条件是不能使用Microlib;
不使用Microlib导致卡死的原理
在使用CubeMX初始化代码时,生成的工程默认是使用Microlib的,正常情况下,在STM32CubeMX通过成的.s文件里可以看到一个__main函数,这个就是microlib的入口地址,他会完成创建栈空间,创建堆空间,初始化用户可能用到的系统库等初始化动作,最后跳转到我们熟悉的main,当使用Microlib时,__main链接的是Microlib,当不使用Microlib时,__main链接的是标准库的C/C++;
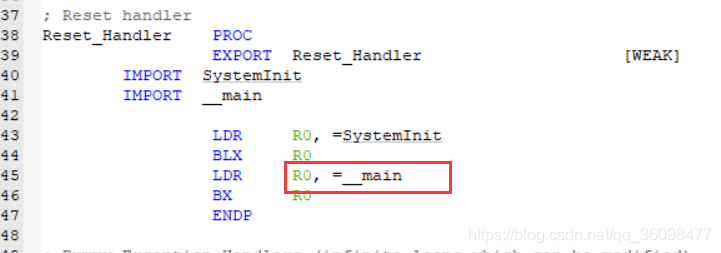
至此,还并没有出现什么问题,但是,一旦在程序中调用printf等函数时,会让MCU进入半主机模式,进而程序会在__main位置卡死,这也就是为什么程序正常编译正常烧录正常调试,但是运行不起来而且Debug卡死在__main位置的原因。
使用C标准库(stdio.h)中的函数,例如printf()之类的函数,会进入半主机模式,发生软件异常,会导致程序无法运行。半主机是这么一种机制,它使得在ARM目标上跑的代码,如果主机电脑运行了调试器,那么该代码可以使用该主机电脑的输入输出设备。 这点非常重要,因为开发初期,可能开发者根本不知道该 ARM 器件上有什么输入输出设备,而半主基机制使得你不用知道ARM器件的外设,利用主机电脑的外设就可以实现输入输出调试。 所以要利用目标 ARM器件的输入输出设备,首先要关掉半主机机制。然后再将输入输出重定向到 ARM 器件上。
卡死解决办法:
解决办法有两种,要么使用Microlib,要么关闭标准库下的半主机模式。
个人认为,后者更加好一点,原因如下:
- 高度精简导致不支持很多很多东西,浮点运算,RTOS,内存分配等等都可能不好使。
- 与标准库有很多繁琐区别;如果是夸平台迁移项目代码时,对于库和底层的适配性不好。
- 精简的程序空间十分有限,没有必要为了空间整这么复杂。
关闭半主机模式的操作方式:
将以下代码添加到文件起始处;
/* 告知连接器不从C库链接使用半主机的函数 */
#pragma import(__use_no_semihosting)
/* 定义 _sys_exit() 以避免使用半主机模式 */
void _sys_exit(int x)
{
x = x;
}
/* 标准库需要的支持类型 */
struct __FILE
{
int handle;
};
FILE __stdout;之后放心大胆的重定向printf即可使用。
优化空间测评
同一个程序不使用Microlib:

同一个程序使用Microlib:
![]()
可见,并没有什么优化大小

















 1071
1071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









