






序
欢迎踏入LDSCITECH的评估板世界,一个充满激情、创新和未知可能性的领域!评估板是连接你和技术未来之间的桥梁,它们是探索新概念、验证创意和打造创新产品的关键。在这个令人兴奋的旅程中,LDSCITECH将与您一同探索微控制器、传感器和电机评估板的神奇世界。
评估板是通往数字创新的大门,为您提供实验和测试的平台,让您在不牺牲复杂性的情况下深入了解各种技术。无论您是初学者还是经验丰富的工程师,评估板都是您在设计过程中的得力助手,帮助您迅速验证概念、加速产品开发,最终将您的想法变为现实。
在LDSCITECH,我们深知评估板的关键作用,因此致力于为您提供最先进、高性能的微控制器、先进的传感器技术以及创新的电机评估板。通过这些工具,您将能够突破技术界限,挑战创新高峰,为您的项目赋能,引领行业变革。
我们相信,每一个从事技术创新的人都值得有一个让创意飞翔的平台。LDSCITECH将与您携手共进,提供全方位的支持,帮助您在评估板的世界里找到您独特的路径。
准备好迎接新的技术挑战吗?让我们一同踏上这段激动人心的评估板之旅吧!
非常感谢您的理解和支持!技术领域的学习和分享是一个不断演进的过程,每个人都在不断提高自己的水平。善意的反馈和建议是进步的动力,同时也为作者提供了改进的机会。
如果您在文档或视频中发现任何不准确或不清楚的地方,或者有任何改进的建议,我们真诚地欢迎您提出。您的意见将有助于提高质量,使信息更加准确和易于理解,使得文档和视频更好地满足读者和观众的需求。
LDSCITECH始终秉承着开放、包容和学习的精神,我们期待与您共同进步,共同创造更优质的技术资源。再次感谢您的关注和支持!
| 实例 | 描述 |
|---|---|
| Eg1_Joystick | 实现一个Joystick摇杆设备 |
| Eg2_WS2812B | 点亮WS2812B灯珠并实现七彩渐变 |
| Eg3_MultiTimer | 移植MultiTimer软件定时器模块 |
| Eg4_Mouse | 实现模拟鼠标功能 |
| Eg5_KeyBoard | 实现模拟键盘功能 |
| Eg6_DoubleJoystick | 实现一个USB双摇杆 |
| Eg7_CompositeGMK | 实现Joystick、MOUSE、Keyboard的组合 |
| Eg8_Gamepad | 实现游戏手柄Gamepad的功能 |
| Eg9_AbsoluteMouse | 实现绝对值鼠标的功能 |
| Eg10_Xinput | 实现Xbox手柄功能,Xinput(出厂默认) |
| Eg11_Xinput01 | 外接摇杆电位器实现Xbox手柄功能 |
| Eg12_MultiAxisButton | 实现8轴32键摇杆 |
第一部分、硬件概述
1.1 3D图

如图1.1所示Gamepad评估板配置了8个6*6轻触按键,一个摇杆(Joystick),搭载一颗WS2812B灯珠,并将UART1串口,编程接口(SWD),外接Joystick接口,Type-C接口引出;
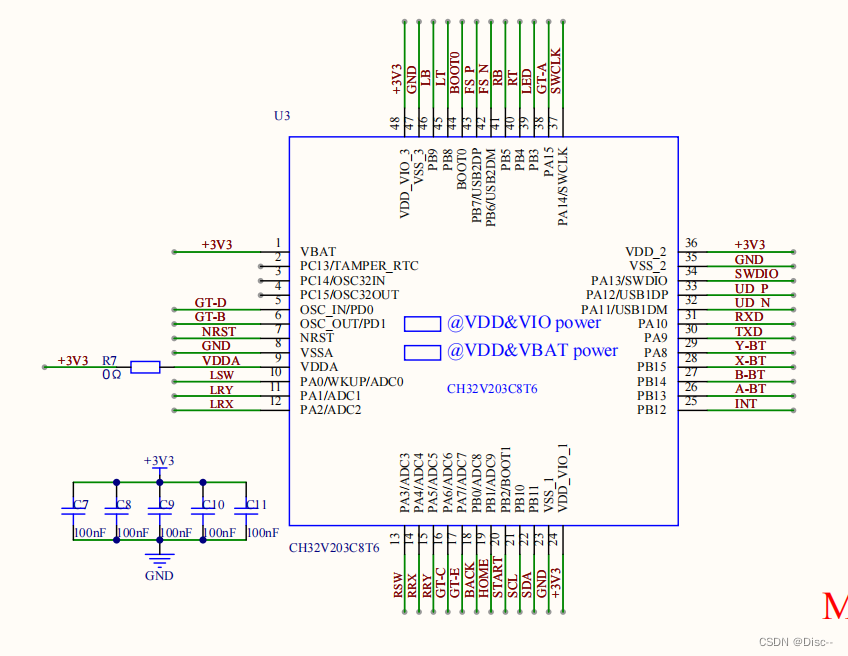
1.2 UGamepad-V2原理图
UGamepad-V2原理图如图1.2所示,如看不清可打开Doc目录下的PDF文档查阅

第二部分、软件工具
2.1 软件概述
在 /Software 目录下是常用的工具软件:
-
Dt2_4:配置USB设备Report描述符的工具;
-
USBHID调试助手/呀呀USB: USB调试工具,相当于串口调试助手功能;
-
BUSHound:总线调试工具;
-
USBlyzer:一款专业的USB协议分析软件
-
MounRiver: 编译器;
-
在线测试工具:
https://devicetests.com/
https://key-test.com/cn/
https://www.sqlsec.com/tools/mouse.html
https://www.onlinemictest.com/zh/mouse-test/
2.2 MounRiver软件入门
MounRiver Studio基于Eclipse GNU版本开发,在保留原平台强大代码编辑功能、便捷组件框架的同时,针对嵌入式C /C++开发,进行了一系列界面、功能、操作方面的修改与优化,以及工具链的指令增添、定制工作。力求打造一款硬件工程师喜爱的、以RISC-V内核为主的嵌入式集成开发环境。大家访问以下链接获取下载:http://mounriver.com/help
第三部分、实战训练
3.1 实例Eg01_ButtonDebug
本节作为第一个实例,目的是两个:一是为了测试按键的可用性;二是引入组件MultiButton;向大家展示开源软件的使用,对于我们做应用的工程师来说,开源套件的使用,往往能达到事半功倍的效果;
3.1.1硬件设计

如上图是 11个6x6的独立按键;
下图是五向开关,支持上下左右中五个方向;

另外有2个按键是摇杆电位器上的中键,高电平有效

所以,我们只要配置18个GPIO作为输入去检测按键信号;
3.1.2 软件设计
3.1.2.1 工程树
首先是工程树,我们打开工程,可以看到Project Explorer下Gamepad目录如下图

其中
- Binaries: 二进制文件;
- Includes: 包含的头文件;
- __Core:__内核文件,存放core_riscv内核文件;
- Debug: 存放串口打印和延迟函数相关的文件
- **Ld:**链接文件,链接文件通常是指用来生成可执行程序的各种源代码文件和库文件。
- **Midleware:**用于存放开源软件;如MultiButton、MultiTimer
- myBSP: 自主编写的外设驱动文件;
- obj: 编译的生成的obj文件;
- Peripheral: 这是MCU厂商提供外设相关驱动;
- Startup: ch32v203的启动文件;
- __User: __ch32v203的系统配置文件,中断相关文件,main函数等;
工程目录这里只做一次介绍,后面的样例目录大同小异。
3.1.2.2 系统时钟
我们先打开startup_ch32v10x.S启动文件,我们看到如下代码
jal SystemInit
la t0, main
定位到SystemInit
void SystemInit (void)
{
RCC->CTLR |= (uint32_t)0x00000001;
RCC->CFGR0 &= (uint32_t)0xF8FF0000;
RCC->CTLR &= (uint32_t)0xFEF6FFFF;
RCC->CTLR &= (uint32_t)0xFFFBFFFF;
RCC->CFGR0 &= (uint32_t)0xFF80FFFF;
RCC->INTR = 0x009F0000;
SetSysClock();
}
关于RCC寄存器的配置,请各位自行查阅用户手册;我们接着打开SetSysClock函数
static void SetSysClock(void)
{
#ifdef SYSCLK_FREQ_HSE
SetSysClockToHSE();
#elif defined SYSCLK_FREQ_48MHz_HSE
SetSysClockTo48_HSE();
#elif defined SYSCLK_FREQ_56MHz_HSE
SetSysClockTo56_HSE();
#elif defined SYSCLK_FREQ_72MHz_HSE
SetSysClockTo72_HSE();
#elif defined SYSCLK_FREQ_96MHz_HSE
SetSysClockTo96_HSE();
#elif defined SYSCLK_FREQ_120MHz_HSE
SetSysClockTo120_HSE();
#elif defined SYSCLK_FREQ_144MHz_HSE
SetSysClockTo144_HSE();
#elif defined SYSCLK_FREQ_48MHz_HSI
SetSysClockTo48_HSI();
#elif defined SYSCLK_FREQ_56MHz_HSI
SetSysClockTo56_HSI();
#elif defined SYSCLK_FREQ_72MHz_HSI
SetSysClockTo72_HSI();
#elif defined SYSCLK_FREQ_96MHz_HSI
SetSysClockTo96_HSI();
#elif defined SYSCLK_FREQ_120MHz_HSI
SetSysClockTo120_HSI();
#elif defined SYSCLK_FREQ_144MHz_HSI
SetSysClockTo144_HSI();
#endif
/* If none of the define above is enabled, the HSI is used as System clock
* source (default after reset)
*/
}
这里我们使用96Mhz内部高速时钟HSI:SYSCLK_FREQ_96MHz_HSI,因为USB外设需要48Mhz,所以为了分频方便,需要选择48的整数倍;
3.1.2.3 用户代码
3.1.2.3.1 Button部分
Button模块主要是独立按键扫描,这里使用了MultiButton事件回调机制;关于MultiButton的使用,大家在GitHub上找到:
https://github.com/0x1abin/MultiButton
同时附带使用方法,这里就不赘述了。
#include "Button.h"
struct Button btn1, btn2, btn3, btn4, btn5, btn6, btn7, btn8, btn9, btn10,
btn11, btn12, btn13,btn14,btn15,btn16,btn17,btn18;
u8 read_button_GPIO(u8 button_id) {
// you can share the GPIO read function with multiple Buttons
switch (button_id) {
case btn1_id:
return GPIO_ReadInputDataBit(LSW_PORT, LSW_PIN);
case btn2_id:
return GPIO_ReadInputDataBit(RSW_PORT, RSW_PIN);
case btn3_id:
return GPIO_ReadInputDataBit(LB_PORT, LB_PIN);
case btn4_id:
return GPIO_ReadInputDataBit(LT_PORT, LT_PIN);
case btn5_id:
return GPIO_ReadInputDataBit(RB_PORT, RB_PIN);
case btn6_id:
return GPIO_ReadInputDataBit(RT_PORT, RT_PIN);
case btn7_id:
return GPIO_ReadInputDataBit(BACK_PORT, BACK_PIN);
case btn8_id:
return GPIO_ReadInputDataBit(HOME_PORT, HOME_PIN);
case btn9_id:
return GPIO_ReadInputDataBit(START_PORT, START_PIN);
case btn10_id:
return GPIO_ReadInputDataBit(A_BT_PORT, A_BT_PIN);
case btn11_id:
return GPIO_ReadInputDataBit(B_BT_PORT, B_BT_PIN);
case btn12_id:
return GPIO_ReadInputDataBit(X_BT_PORT, X_BT_PIN);
case btn13_id:
return GPIO_ReadInputDataBit(Y_BT_PORT, Y_BT_PIN);
case btn14_id:
return GPIO_ReadInputDataBit(GTA_PORT, GTA_PIN);
case btn15_id:
return GPIO_ReadInputDataBit(GTB_PORT, GTB_PIN);
case btn16_id:
return GPIO_ReadInputDataBit(GTC_PORT, GTC_PIN);
case btn17_id:
return GPIO_ReadInputDataBit(GTD_PORT, GTD_PIN);
case btn18_id:
return GPIO_ReadInputDataBit(GTE_PORT, GTE_PIN);
default:
return 0;
}
}
void LSW_SINGLE_Click_Handler(void* btn) {
printf("LSW_SINGLE_Click_Handler\r\n");
}
void RSW_SINGLE_Click_Handler(void* btn) {
printf("RSW_SINGLE_Click_Handler\r\n");
}
void LB_SINGLE_Click_Handler(void* btn) {
printf("LB_SINGLE_Click_Handler\r\n");
}
void LT_SINGLE_Click_Handler(void* btn) {
printf("LT_SINGLE_Click_Handler\r\n");
}
void RB_SINGLE_Click_Handler(void* btn) {
printf("RB_SINGLE_Click_Handler\r\n");
}
void RT_SINGLE_Click_Handler(void* btn) {
printf("RT_SINGLE_Click_Handler\r\n");
}
void BACK_SINGLE_Click_Handler(void* btn) {
printf("BACK_SINGLE_Click_Handler\r\n");
}
void HOME_SINGLE_Click_Handler(void* btn) {
printf("HOME_SINGLE_Click_Handler\r\n");
}
void START_SINGLE_Click_Handler(void* btn) {
printf("START_SINGLE_Click_Handler\r\n");
}
void A_SINGLE_Click_Handler(void* btn) {
printf("A_SINGLE_Click_Handler\r\n");
}
void B_SINGLE_Click_Handler(void* btn) {
printf("B_SINGLE_Click_Handler\r\n");
}
void X_SINGLE_Click_Handler(void* btn) {
printf("X_SINGLE_Click_Handler\r\n");
}
void Y_SINGLE_Click_Handler(void* btn) {
printf("Y_SINGLE_Click_Handler\r\n");
}
void GTA_SINGLE_Click_Handler(void* btn) {
printf("GTA_SINGLE_Click_Handler\r\n");
}
void GTB_SINGLE_Click_Handler(void* btn) {
printf("GTB_SINGLE_Click_Handler\r\n");
}
void GTC_SINGLE_Click_Handler(void* btn) {
printf("GTC_SINGLE_Click_Handler\r\n");
}
void GTD_SINGLE_Click_Handler(void* btn) {
printf("GTD_SINGLE_Click_Handler\r\n");
}
void GTE_SINGLE_Click_Handler(void* btn) {
printf("GTE_SINGLE_Click_Handler\r\n");
}
void ButtonInit(void) {
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(
RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOD |
RCC_APB2Periph_AFIO, ENABLE); // 使能GPIOA时钟
GPIO_PinRemapConfig(GPIO_Remap_PD01, ENABLE);
// 配置GPIOA的Pin 0/3为输入下拉模式(IPD)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置GPIOA的Pin 6/7/8/15为输入下拉模式(IPU)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8
| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置GPIOB的Pin 6/7/8/15为输入下拉模式(IPU)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2
| GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_13
| GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 配置GPIOB的Pin 6/7/8/15为输入下拉模式(IPU)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOD, &GPIO_InitStructure);
button_init(&btn1, read_button_GPIO, 1, btn1_id);
button_init(&btn2, read_button_GPIO, 1, btn2_id);
button_init(&btn3, read_button_GPIO, 0, btn3_id);
button_init(&btn4, read_button_GPIO, 0, btn4_id);
button_init(&btn5, read_button_GPIO, 0, btn5_id);
button_init(&btn6, read_button_GPIO, 0, btn6_id);
button_init(&btn7, read_button_GPIO, 0, btn7_id);
button_init(&btn8, read_button_GPIO, 0, btn8_id);
button_init(&btn9, read_button_GPIO, 0, btn9_id);
button_init(&btn10, read_button_GPIO, 0, btn10_id);
button_init(&btn11, read_button_GPIO, 0, btn11_id);
button_init(&btn12, read_button_GPIO, 0, btn12_id);
button_init(&btn13, read_button_GPIO, 0, btn13_id);
button_init(&btn14, read_button_GPIO, 0, btn14_id);
button_init(&btn15, read_button_GPIO, 0, btn15_id);
button_init(&btn16, read_button_GPIO, 0, btn16_id);
button_init(&btn17, read_button_GPIO, 0, btn17_id);
button_init(&btn18, read_button_GPIO, 0, btn18_id);
button_attach(&btn1, SINGLE_CLICK, LSW_SINGLE_Click_Handler);
button_attach(&btn2, SINGLE_CLICK, RSW_SINGLE_Click_Handler);
button_attach(&btn3, SINGLE_CLICK, LB_SINGLE_Click_Handler);
button_attach(&btn4, SINGLE_CLICK, LT_SINGLE_Click_Handler);
button_attach(&btn5, SINGLE_CLICK, RB_SINGLE_Click_Handler);
button_attach(&btn6, SINGLE_CLICK, RT_SINGLE_Click_Handler);
button_attach(&btn7, SINGLE_CLICK, BACK_SINGLE_Click_Handler);
button_attach(&btn8, SINGLE_CLICK, HOME_SINGLE_Click_Handler);
button_attach(&btn9, SINGLE_CLICK, START_SINGLE_Click_Handler);
button_attach(&btn10, SINGLE_CLICK, A_SINGLE_Click_Handler);
button_attach(&btn11, SINGLE_CLICK, B_SINGLE_Click_Handler);
button_attach(&btn12, SINGLE_CLICK, X_SINGLE_Click_Handler);
button_attach(&btn13, SINGLE_CLICK, Y_SINGLE_Click_Handler);
button_attach(&btn14, SINGLE_CLICK, GTA_SINGLE_Click_Handler);
button_attach(&btn15, SINGLE_CLICK, GTB_SINGLE_Click_Handler);
button_attach(&btn16, SINGLE_CLICK, GTC_SINGLE_Click_Handler);
button_attach(&btn17, SINGLE_CLICK, GTD_SINGLE_Click_Handler);
button_attach(&btn18, SINGLE_CLICK, GTE_SINGLE_Click_Handler);
button_start(&btn1);
button_start(&btn2);
button_start(&btn3);
button_start(&btn4);
button_start(&btn5);
button_start(&btn6);
button_start(&btn7);
button_start(&btn8);
button_start(&btn9);
button_start(&btn10);
button_start(&btn11);
button_start(&btn12);
button_start(&btn13);
button_start(&btn14);
button_start(&btn15);
button_start(&btn16);
button_start(&btn17);
button_start(&btn18);
}
这段代码是用于初始化和检测按键的CH32微控制器代码。注释和解释如下:
- ButtonInit函数用于初始化按键的IO引脚。它配置了不同的IO引脚作为输入,一些引脚使用了上拉(IPU)模式,另一些引脚使用了下拉(IPD)模式,这取决于按键硬件连接和工作原理;同时调用MultiTimer的初始化函数,添加需要的按键回调函数,这里是用到了单击事件。
3.1.3 下载验证
我们把固件程序下载进去可以,打开串口调试助手;接H3排针的TX到USB转TTL模块,可以打印这18个按键按下的Log信息;

3.2 实例Eg02_AnalogDebug
本节作为这个实例主要是为了测试摇杆电位器;
3.2.1硬件设计
摇杆电位器原理图如下所示:
所以,我们只要配置4路ADC输入检测两个电位器的XY; MCU的配置如下:
3.2.2 软件设计
3.2.2.1 ADC初始化配置
/*
* Analog.c
*
* Created on: Dec 4, 2023
* Author: Administrator
*/
#include "Analog.h"
u16 ADC_ConvertedValue[LENGTH]={0};
//ADC对应GPIO初始化配置以及ADC初始化配置
void adc_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1 , ENABLE ); //使能GPIOA时钟和ADC
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_4|GPIO_Pin_5; //PA1~5对应ADC通道1~5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //GPIO模式为模拟输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //配置ADC为独立模式
ADC_InitStructure.ADC_ScanConvMode = ENABLE; //多通道模式下开启扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //设置开启连续转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //设置转换不是由外部触发启动,软件触发启动
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //设置ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = LENGTH; //规则转换的ADC通道的数目
ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStructure中指定的参数初始化ADC1寄存器
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置ADC时钟分频为6分频
ADC_Cmd(ADC1, ENABLE); //使能ADC1
ADC_ResetCalibration(ADC1); //重置ADC1校准寄存器。
while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束
ADC_StartCalibration(ADC1); //开启AD校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束
}
//ADC DMA模式配置
void DMA_Tx_Init( void )
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_DMA1, ENABLE ); //使能开启DMA时钟
DMA_DeInit(DMA1_Channel1); //复位DMA控制器
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)&ADC1->RDATAR; //配置外设地址为ADC数据寄存器地址
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)ADC_ConvertedValue; //配置存储器地址为读取ADC值地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //配置数据源为外设,即DMA传输方式为外设到存储器
DMA_InitStructure.DMA_BufferSize = LENGTH; //设置DMA数据缓冲区大小,此处设置为LENGTH
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;//设置DMA外设递增模式关闭
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //设置DMA存储器递增模式开启
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //设置外设数据大小为半字,即两个字节
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //设置存储器数据大小为半字,即两个字节
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //设置DMA模式为循环传输模式
DMA_InitStructure.DMA_Priority = DMA_Priority_High; //设置DMA传输通道优先级为高,当使用一 DMA通道时,优先级设置不影响
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //因为此DMA传输方式为外设到存储器,因此禁用存储器到存储器传输方式
DMA_Init( DMA1_Channel1, &DMA_InitStructure ); //初始化DMA
DMA_Cmd(DMA1_Channel1 , ENABLE); //使能DMA
}
void ADC_DMA_CONF(void)
{
adc_Init();
DMA_Tx_Init();
// 配置 ADC 通道转换顺序为1,第一个转换,采样时间为55.5个时钟周期
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 1, ADC_SampleTime_239Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 2, ADC_SampleTime_239Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_4, 3, ADC_SampleTime_239Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 4, ADC_SampleTime_239Cycles5);
// 使能ADC DMA 请求
ADC_DMACmd(ADC1, ENABLE);
// 由于没有采用外部触发,所以使用软件触发ADC转换
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
}
这段代码的功能是配置STM32的ADC和DMA,实现对多个通道的模拟输入进行连续转换,并将转换结果存储在数组 ADC_ConvertedValue 中。这通常用于读取传感器等模拟信号。在使用时,可以在 ADC_ConvertedValue 数组中获取相应通道的ADC转换结果。
3.2.2.2 用户代码
int main(void)
{
u16 tick=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
USART_Printf_Init(115200);
printf("SystemClk:%d;\r\n", SystemCoreClock);
ButtonInit();
ADC_DMA_CONF();
printf("ADC Debug Demo;\r\n");
while(1)
{
tick++;
if((tick%100)==0)//500ms
{
tick=0;
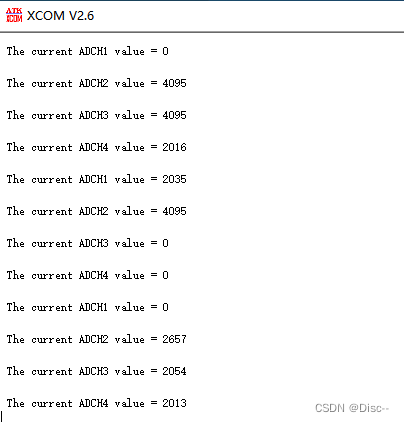
printf("\r\n The current ADCH1 value = %d \r\n", ADC_ConvertedValue[0]);
printf("\r\n The current ADCH2 value = %d \r\n", ADC_ConvertedValue[1]);
printf("\r\n The current ADCH3 value = %d \r\n", ADC_ConvertedValue[2]);
printf("\r\n The current ADCH4 value = %d \r\n", ADC_ConvertedValue[3]);
}
button_ticks();
Delay_Ms(5);
}
}
测试代码我们500ms直接打印AD值日志一次;
3.2.3 下载验证
我们把固件程序下载进去可以,打开串口调试助手;接H3排针的TX到USB转TTL模块,可以打印这4个通道ADC的Log信息;
3.3 实例Eg03_MultiTimer
本节使用一个开源的软件定时器套件MultiTimer来实现一个软件框架,用于实现LED、ADC、按键多任务;关于MultiTimer开源,大家可以访问开源的GitHub链接学习:https://github.com/0x1abin/MultiTimer.git
3.3.1硬件设计
本节用到摇杆电位器按钮和LED,摇杆电位器和按键上两节已经介绍,LED的原理图如下:
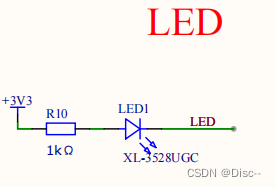
LED接到了MCU的PB3:
3.3.2 软件设计
3.3.2.1 LED配置
#include "LED.h"
/*********************************************************************
* @fn GPIO_Toggle_INIT
*
* @brief Initializes GPIOA.0
*
* @return none
*/
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
这段代码的功能是配置LED的PB3作为推挽输出;
同时LED.h 用一个宏实现IO拉高拉低;
#ifndef MYBSP_LED_H_
#define MYBSP_LED_H_
#include "debug.h"
#define LED(x) (x?GPIO_ResetBits(GPIOB,GPIO_Pin_3):GPIO_SetBits(GPIOB,GPIO_Pin_3))
extern void LED_Init(void);
#endif /* MYBSP_LED_H_ */
3.3.2.2 SYStick配置
因为MultiTimer需要就像RTOS需要Tick,这里配置Systick作为它的时基;
void SysTick_Handler(void) __attribute__((interrupt("WCH-Interrupt-fast")));
/*********************************************************************
* @fn SYSTICK_Init_Config
*
* @brief SYSTICK_Init_Config.
*
* @return none
*/
void SYSTICK_Init_Config(u64 ticks)
{
SysTick->SR = 0;
SysTick->CNT = 0;
SysTick->CMP = ticks;
SysTick->CTLR =0xF;
NVIC_SetPriority(SysTicK_IRQn, 15);
NVIC_EnableIRQ(SysTicK_IRQn);
}
void SysTick_Handler(void)
{
SysTick->SR = 0;
uwTick++;
}
3.3.2.3 应用代码
最后我们创建三个定时器分别执行对应的任务,如下代码:
vu32 uwTick;
MultiTimer timer1;
MultiTimer timer2;
MultiTimer timer3;
uint64_t PlatformTicksGetFunc(void) {
return uwTick;
}
void LEDTimer1Callback(MultiTimer* timer, void *userData)
{
static FlagStatus LedSta=RESET;
LED(LedSta);
LedSta=~LedSta;
printf("LED Status:%d\r\n",LedSta);
MultiTimerStart(timer, 500, LEDTimer1Callback, userData);
}
void ADCTimer2Callback(MultiTimer* timer, void *userData)
{
printf("\r\n The current ADCH1 value = %d \r\n", ADC_ConvertedValue[0]);
printf("\r\n The current ADCH2 value = %d \r\n", ADC_ConvertedValue[1]);
printf("\r\n The current ADCH3 value = %d \r\n", ADC_ConvertedValue[2]);
printf("\r\n The current ADCH4 value = %d \r\n", ADC_ConvertedValue[3]);
MultiTimerStart(timer, 1000, ADCTimer2Callback, userData);
}
void ButtonTimer3Callback(MultiTimer* timer, void *userData)
{
button_ticks();;
MultiTimerStart(timer, 5, ButtonTimer3Callback, userData);
}
void PollSystemInit(void) {
MultiTimerInstall(PlatformTicksGetFunc);
MultiTimerStart(&timer1, 500, LEDTimer1Callback, NULL);
MultiTimerStart(&timer2, 1000, ADCTimer2Callback, NULL);
MultiTimerStart(&timer3, 5, ButtonTimer3Callback, NULL);
SYSTICK_Init_Config(SystemCoreClock/1000-1);
}
3.3.3 下载验证
我们把固件程序下载进去可以,打开串口调试助手;接H3排针的TX到USB转TTL模块,可以打印三个任务Log信息;

3.4 实例Eg04_Mouse
本节实现一个模拟鼠标功能;左摇杆实现的是XY轴移动;右摇杆实现的是滚轮上下,右摇杆按键实现的是鼠标中键,X和B键实现的是鼠标左右键;
3.4.1硬件设计
前面几个章节基本把所需的硬件介绍完成,本节开始,硬件直接参考原理图文档。
3.4.2 软件设计
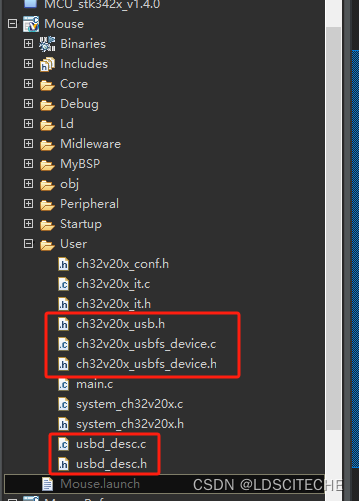
我们直接在官方例程\CH32V20xEVT\EVT\EXAM\USB\USBFS\DEVICE\CompatibilityHID这个工程目录中User部分USB相关代码(ch32v20x_usb.h、ch32v20x_usbfs_device.c、ch32v20x_usbfs_device.h、usbd_desc.c、usbd_desc.h)复制粘贴到我们自己的Mouse工程中;如下图红色方框所示:
3.4.2.1 USB中断请求
ch32v20x_usbfs_device中的USBHD_IRQHandler是USB的中断服务函数;
Usb标准请求USBFS_SetupReqCode中有个USB_GET_DESCRIPTOR获取描述符的请求,其中获取了以下几种描述符:
USB_DESCR_TYP_DEVICE:设备描述符;
USB_DESCR_TYP_CONFIG:配置描述符;
USB_DESCR_TYP_HID:HID描述符;
USB_DESCR_TYP_REPORT:报表描述符;
USB_DESCR_TYP_STRING;字符串描述符;
上述描述符定义在usbd_desc.c;
3.4.2.1.1 设备描述符
/* Device Descriptor */
const uint8_t MyDevDescr[ ] =
{
0x12, // bLength
0x01, // bDescriptorType
0x00, 0x02, // bcdUSB
0x00, // bDeviceClass
0x00, // bDeviceSubClass
0x00, // bDeviceProtocol
DEF_USBD_UEP0_SIZE, // bMaxPacketSize0
(uint8_t)DEF_USB_VID, (uint8_t)( DEF_USB_VID >> 8 ), // idVendor
(uint8_t)DEF_USB_PID, (uint8_t)( DEF_USB_PID >> 8 ), // idProduct
0x00, DEF_IC_PRG_VER, // bcdDevice
0x01, // iManufacturer
0x02, // iProduct
0x03, // iSerialNumber
0x01, // bNumConfigurations
};
设备描述符的定义注释已经非常清楚,需要注意的是USB_VID和USB_PID,VID是厂商描述符,是需要向Usb-IF组织申请的,PID是产品ID可以自定义;我们这里定义如下:
#define DEF_USB_VID 0x0810
#define DEF_USB_PID 0x0001
3.4.2.1.2 配置描述符集合
/* Configuration Descriptor Set */
const uint8_t MyCfgDescr[ ] =
{
0x09, /* bLength: Configuration Descriptor size */
USB_DESC_TYPE_CONFIGURATION, /* bDescriptorType: Configuration */
USB_CUSTOM_HID_CONFIG_DESC_SIZ,
/* wTotalLength: Bytes returned */
0x00,
0x01, /*bNumInterfaces: 1 interface*/
0x01, /*bConfigurationValue: Configuration value*/
0x00, /*iConfiguration: Index of string descriptor describing
the configuration*/
0xC0, /*bmAttributes: bus powered */
0x32, /*MaxPower 100 mA: this current is used for detecting Vbus*/
/************** Descriptor of CUSTOM HID interface ****************/
/* 09 */
0x09, /*bLength: Interface Descriptor size*/
USB_DESC_TYPE_INTERFACE,/*bDescriptorType: Interface descriptor type*/
0x00, /*bInterfaceNumber: Number of Interface*/
0x00, /*bAlternateSetting: Alternate setting*/
0x01, /*bNumEndpoints*/
0x03, /*bInterfaceClass: CUSTOM_HID*/
0x00, /*bInterfaceSubClass : 1=BOOT, 0=no boot*/
0x00, /*nInterfaceProtocol : 0=none, 1=keyboard, 2=mouse*/
0, /*iInterface: Index of string descriptor*/
/******************** Descriptor of CUSTOM_HID *************************/
/* 18 */
0x09, /*bLength: CUSTOM_HID Descriptor size*/
CUSTOM_HID_DESCRIPTOR_TYPE, /*bDescriptorType: CUSTOM_HID*/
0x11, /*bCUSTOM_HIDUSTOM_HID: CUSTOM_HID Class Spec release number*/
0x01,
0x00, /*bCountryCode: Hardware target country*/
0x01, /*bNumDescriptors: Number of CUSTOM_HID class descriptors to follow*/
0x22, /*bDescriptorType*/
USBD_CUSTOM_HID_REPORT_DESC_SIZE,/*wItemLength: Total length of Report descriptor*/
0x00,
/******************** Descriptor of Custom HID endpoints ********************/
/* 27 */
0x07, /*bLength: Endpoint Descriptor size*/
USB_DESC_TYPE_ENDPOINT, /*bDescriptorType:*/
CUSTOM_HID_EPIN_ADDR, /*bEndpointAddress: Endpoint Address (IN)*/
0x03, /*bmAttributes: Interrupt endpoint*/
CUSTOM_HID_EPIN_SIZE, /*wMaxPacketSize: 2 Byte max */
0x00,
CUSTOM_HID_FS_BINTERVAL, /*bInterval: Polling Interval */
/* 34 */
};
如上图,配置描述符集合里面包含了配置描述符、接口描述符、HID描述符、以及端点描述符;
3.4.2.1.3 报表描述符
/* Mouse Report Descriptor */
const uint8_t MouseRepDesc[ ] =
{
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x02, // USAGE (Mouse)
0xa1, 0x01, // COLLECTION (Application)
0x09, 0x01, // USAGE (Pointer)
0xa1, 0x00, // COLLECTION (Physical)
0x05, 0x09, // USAGE_PAGE (Button)
0x19, 0x01, // USAGE_MINIMUM (Button 1)
0x29, 0x03, // USAGE_MAXIMUM (Button 3)
0x15, 0x00, // LOGICAL_MINIMUM (0)
0x25, 0x01, // LOGICAL_MAXIMUM (1)
0x95, 0x03, // REPORT_COUNT (3)
0x75, 0x01, // REPORT_SIZE (1)
0x81, 0x02, // INPUT (Data,Var,Abs)
0x95, 0x01, // REPORT_COUNT (1)
0x75, 0x05, // REPORT_SIZE (5)
0x81, 0x03, // INPUT (Cnst,Var,Abs)
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x30, // USAGE (X)
0x09, 0x31, // USAGE (Y)
0x09, 0x38, // USAGE (Wheel)
0x15, 0x81, // LOGICAL_MINIMUM (-127)
0x25, 0x7f, // LOGICAL_MAXIMUM (127)
0x75, 0x08, // REPORT_SIZE (8)
0x95, 0x03, // REPORT_COUNT (3)
0x81, 0x06, // INPUT (Data,Var,Rel)
0xc0, // END_COLLECTION
0xc0 //END_COLLECTION
};
以上是鼠标的报表描述符,详细描述了鼠标协议报文的各个字段。
3.4.2.3 字符串描述符
最后我们来看一下字符串描述符,字符串有以下这些,需要主要的是使用的是Unicode编码:
Descriptor 0, Language descriptor:语言ID描述符;
Descriptor 1, Manufacturers String descriptor:厂商字符串描述符;
Descriptor 2, Product String descriptor:产品字符串描述符;
Descriptor 3, Serial-number String descriptor :序列号描述符;
3.4.2.3.1 语言ID描述符
语言ID描述符一般比较固定,无需修改;
/* Language Descriptor */
const uint8_t MyLangDescr[ ] =
{
0x04,
0x03,
0x09,
0x04
};
3.4.2.3.2 厂商字符串描述符
这个是厂商名字的编码,这个是我们的商标名称“LDSCITECH”
/* Manufacturer Descriptor */
const uint8_t MyManuInfo[ ] =
{
0x16,0x03,0x4C,0x00,0x44,0x00,0x53,0x00,0x43,0x00,0x49,0x00,0x54,0x00,0x45,0x00,
0x43,0x00,0x48,0x00,0x45,0x00
};
3.4.2.3.3 产品字符串描述符
这个是我们自定义的编码,这个名称我们就取"LD Mouse"
/* Product Information */
const uint8_t MyProdInfo[ ] =
{
0x12,0x03,0x4C,0x00,0x44,0x00,0x20,0x00,0x4D,0x00,0x6F,0x00,0x75,0x00,0x73,0x00,
0x65,0x00
};
3.4.2.3.4 序列号描述符
这里的序列号描述符参考了ST的做法,用的是UID,关于UID,我们的CH32V203参考手册也有介绍;
#define UID_BASE 0x1FFFF7E8UL /*!< Unique device ID register base address */
#define DEVICE_ID1 (UID_BASE)
#define DEVICE_ID2 (UID_BASE + 0x4)
#define DEVICE_ID3 (UID_BASE + 0x8)
/* Serial Number Information */
/* Serial Number Information */
uint8_t USBD_StringSerial[USB_SIZ_STRING_SERIAL] = {
USB_SIZ_STRING_SERIAL,
USB_DESC_TYPE_STRING,};
/**
* @brief Convert Hex 32Bits value into char
* @param value: value to convert
* @param pbuf: pointer to the buffer
* @param len: buffer length
* @retval None
*/
void IntToUnicode(uint32_t value, uint8_t * pbuf, uint8_t len)
{
uint8_t idx = 0;
for (idx = 0; idx < len; idx++)
{
if (((value >> 28)) < 0xA)
{
pbuf[2 * idx] = (value >> 28) + '0';
}
else
{
pbuf[2 * idx] = (value >> 28) + 'A' - 10;
}
value = value << 4;
pbuf[2 * idx + 1] = 0;
}
}
void Get_SerialNum(void)
{
uint32_t deviceserial0, deviceserial1, deviceserial2;
deviceserial0 = *(uint32_t *) DEVICE_ID1;
deviceserial1 = *(uint32_t *) DEVICE_ID2;
deviceserial2 = *(uint32_t *) DEVICE_ID3;
deviceserial0 += deviceserial2;
if (deviceserial0 != 0)
{
IntToUnicode(deviceserial0, &USBD_StringSerial[2], 8);
IntToUnicode(deviceserial1, &USBD_StringSerial[18], 4);
}
}
3.4.2.2 用户代码
void PollSystemInit(void) {
MultiTimerInstall(PlatformTicksGetFunc);
MultiTimerStart(&timer1, 5, LEDTimer1Callback, NULL);
MultiTimerStart(&timer2, 10, ADCTimer2Callback, NULL);
MultiTimerStart(&timer3, 15, ButtonTimer3Callback, NULL);
MultiTimerStart(&timer4, 20, ReportTimer4Callback, NULL);
SYSTICK_Init_Config(SystemCoreClock/1000-1);
}
我们还是创建新建4个软件定时器,在回调函数里面执行对应的外设任务;LED同上节,无任何变化;接下来分别介绍各线程任务;
3.4.2.2.1 鼠标结构体
typedef struct
{
u8 button;
s8 x;
s8 y;
s8 wheel;
}MouseTypdef;
MouseTypdef MS_Data_Pack;
这里定义了鼠标报文,第一个结构体成员button代表鼠标按键,其中bit0代表鼠标左键,bit1代表鼠标右键,bit2则是鼠标中键;第二第三个结构体成员xy代表鼠标坐标位移;第四个wheel是滚轮位移;
3.2.2.2.2 ADC数据处理
void ADCTimer2Callback(MultiTimer* timer, void *userData)
{
static u8 AdcCount=0;
static u16 wtick=0;
static u32 A1Sum=0,A2Sum=0,A3Sum=0,A4Sum=0;
//u16 xtemp=0,ytemp=0,xtemp1=0,ytemp1=0;
u16 xtemp=0,ytemp=0,xtemp1=0;//ytemp1=0;
A1Sum+=ADC_ConvertedValue[0];
A2Sum+=ADC_ConvertedValue[1];
A3Sum+=ADC_ConvertedValue[2];
A4Sum+=ADC_ConvertedValue[3];
AdcCount+=1;
if(AdcCount==10)
{
//X
xtemp=Map( A1Sum/AdcCount, 0, 4095, 0, UINT8_MAX );
ytemp=Map( A2Sum/AdcCount, 0, 4095, 0, UINT8_MAX );
xtemp1=Map( A3Sum/AdcCount, 0, 4095, 0, UINT8_MAX );
//ytemp1=Map( A4Sum/AdcCount, 0, 4095, 0, UINT8_MAX );
//printf("CH: %d %d %d %d\r\n", xtemp,ytemp,xtemp1,ytemp1);
A1Sum=0;
A2Sum=0;
A3Sum=0;
//A4Sum=0;
AdcCount=0;
if(xtemp<(CENTER_X-10))
{
MS_Data_Pack.x=-(((CENTER_X-xtemp)>>DIV)+1);
}else if(xtemp>(CENTER_X+10))
{
MS_Data_Pack.x=((xtemp-CENTER_X)>>DIV)+1;;
}else{
MS_Data_Pack.x=0;
}
if(ytemp<(CENTER_Y-10))
{
MS_Data_Pack.y=-(((CENTER_Y-ytemp)>>DIV)+1);
}else if(ytemp>(CENTER_Y+10))
{
MS_Data_Pack.y=((ytemp-CENTER_Y)>>DIV)+1;;
}else{
MS_Data_Pack.y=0;
}
if(xtemp1<(CENTER_X1-64))
{
if(++wtick==5)
{
wtick=0;
MS_Data_Pack.wheel=1;
}else{
MS_Data_Pack.wheel=0;
}
}else if(xtemp1>(CENTER_X1+64))
{
if(++wtick==5)
{
wtick=0;
MS_Data_Pack.wheel=-1;
}else{
MS_Data_Pack.wheel=0;
}
}else{
wtick=0;
MS_Data_Pack.wheel=0;
}
//printf("X=%d Y=%d wheel=%d\r\n", MS_Data_Pack.x,MS_Data_Pack.y);
}
MultiTimerStart(timer, 1, ADCTimer2Callback, userData);
}
这部分代码是取10次平均后得到平均值再做一个映射,将范围04095转出0255;根据摇杆偏移中心点多少算出鼠标坐标和滚轮位移;
3.4.2.2.3 按键数据处理
按键任务回调函数如下,一样没有变化;
void ButtonTimer3Callback(MultiTimer* timer, void *userData)
{
button_ticks();
MultiTimerStart(timer, 5, ButtonTimer3Callback, userData);
}
在button.c中主要注册几个按键事件回调,按下和释放,如下
void RSW_PRESS_UP_Handler(void* btn) {
printf("RSW_PRESS_UP_Handler\r\n");
MS_Data_Pack.button&=(~0x04);
}
void RSW_PRESS_DOWN_Handler(void* btn) {
printf("RSW_PRESS_DOWN_Handler\r\n");
MS_Data_Pack.button|=0x04;
}
void B_PRESS_UP_Handler(void* btn) {
printf("B_PRESS_UP_Handler\r\n");
MS_Data_Pack.button&=(~0x02);
}
void B_PRESS_DOWN_Handler(void* btn) {
printf("B_PRESS_DOWN_Handler\r\n");
MS_Data_Pack.button|=0x02;
}
void X_PRESS_UP_Handler(void* btn) {
printf("X_PRESS_UP_Handler\r\n");
MS_Data_Pack.button&=(~0x01);
}
void X_PRESS_DOWN_Handler(void* btn) {
printf("X_PRESS_DOWN_Handler\r\n");
MS_Data_Pack.button|=0x01;
}
void ButtonInit(void) {
//省略部分代码
button_attach(&btn2, PRESS_UP, RSW_PRESS_UP_Handler);
button_attach(&btn2, PRESS_DOWN, RSW_PRESS_DOWN_Handler);
button_attach(&btn11, PRESS_UP, B_PRESS_UP_Handler);
button_attach(&btn11, PRESS_DOWN, B_PRESS_DOWN_Handler);
button_attach(&btn12, PRESS_UP, X_PRESS_UP_Handler);
button_attach(&btn12, PRESS_DOWN, X_PRESS_DOWN_Handler);
//省略部分代码
}
可以看到,上面按键代码主要是在按键按下置位弹起清零;
3.4.3 下载验证
我们把固件程序下载进去可以看到LD Mouse鼠标,摇动左摇杆是鼠标指针的位移;右摇杆左右没有功能,上下是滚轮上下,右摇杆按键是鼠标中键;X是鼠标左键,B是鼠标右键;














 3883
3883











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









