







问题描述
编程作业:
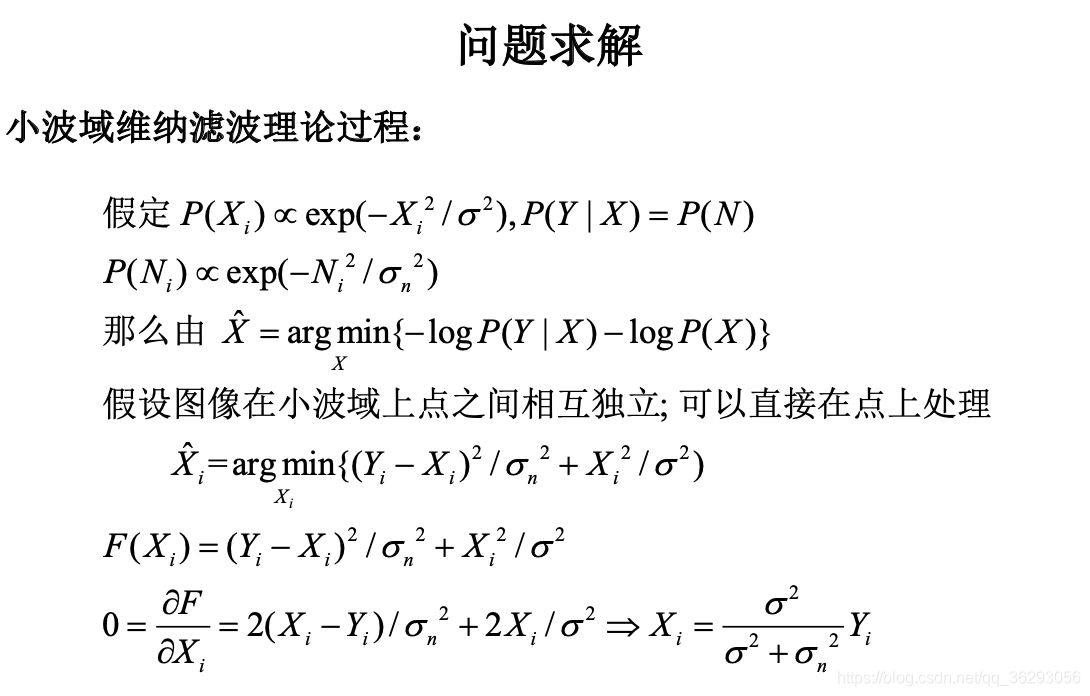
以 lena 图像为例,编程实现小波域维纳滤波
编程实现:
step1: 导入图片

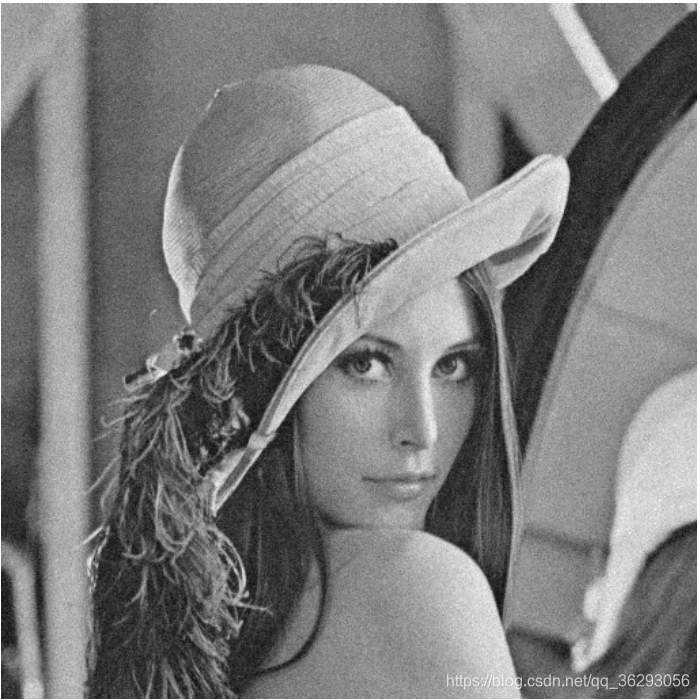
step2: 构造添加噪声的函数得到有噪声的图片
def get_noise(img, sigma):
row, col = img.shape
noise = np.random.randn(row,col)*sigma
img_noise = img + noise
img_noise = np.where(img_noise <= 0, 0, img_noise)
img_noise = np.where(img_noise > 255, 255, img_noise)
return np.uint8(img_noise)
噪声方差取值为 10,得到的噪声图片如下所示
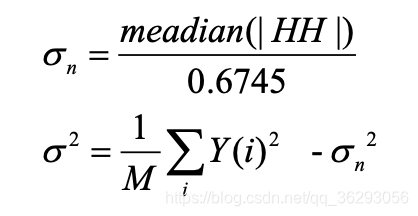
step3: 构造维纳滤波的方差估计函数,其公式为:
def wiener_filter(img,HH):
std_noise = np.median(np.abs(HH))/0.6745
sigma_noise = std_noise**2
sigma_img = (np.sum(img*img)-sigma_noise)/(img.shape[0]*img.shape[1])
img_no_noise = sigma_img/(sigma_img+sigma_noise)*img
return img_no_noise
step4: 由于小波域变换后的维纳滤波是一个递归过程,LL(低频分量)要不断的被分割为多尺度,又要被反变换回图片。故将小波域的变换和反变换过程写到一个函数里面,进行递归过程。采用的 bior4.4 小波基。
def mutial_dwt2(img, index):
img = pywt.dwt2(img, 'bior4.4')
LL, (LH, HL, HH) = img
LH = wiener_filter(LH, HH)
HL = wiener_filter(HL, HH)
HH = wiener_filter(HH, HH)
if index > 1:
LL = mutial_dwt2(LL, index-1)
row, col = LL.shape
#小波重构可能会改变矩阵维数,进行统一
d1 = row - HH.shape[0]
d2 = col - HH.shape[1]
if d1 > 0 or d2 > 0:
d1 = row - np.arange(d1) - 1
d2 = col - np.arange(d2) - 1
LL = np.delete(LL, d1, axis=0)
LL = np.delete(LL, d2, axis=1)
img1 = pywt.idwt2((LL, (LH, HL, HH)), 'bior4.4')
return img1
step5: 运行函数,其中分解和重构次数为 5,得到的去燥图片如下
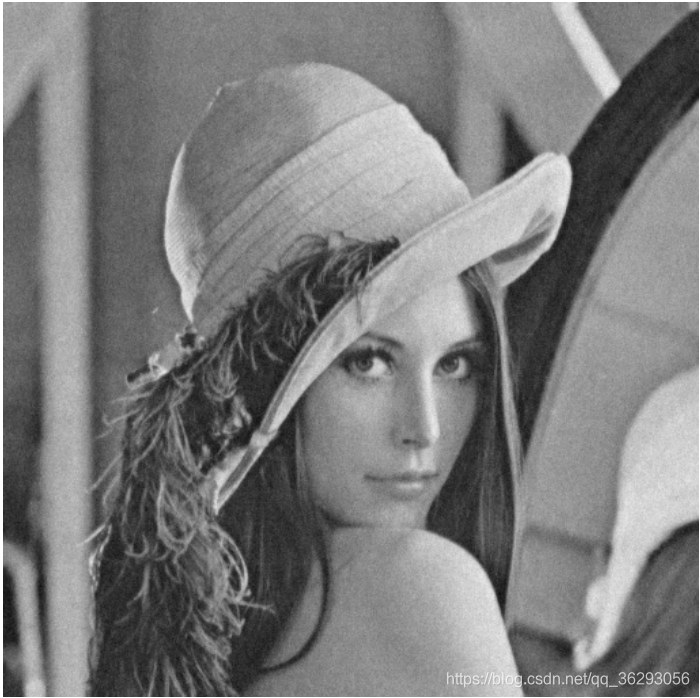
step6: 图片对比,由于噪声值较小,所以进行了归一化显示
从结果可以看出,去出了不少的噪声,已经能看出原图像的大概轮廓。
运行说明:
环境
Numpy == 1.19.2
OpenCV-python == 4.4.0.44
PyWavelets == 1.1.1
全代码
import pywt
import cv2
import numpy as np
def normalization(img):
img = (img - np.min(img))/(np.max(img)-np.min(img))
return img
def get_noise(img, sigma):
row, col = img.shape
noise = np.random.randn(row,col)*sigma
img_noise = img + noise
img_noise = np.where(img_noise <= 0, 0, img_noise)
img_noise = np.where(img_noise > 255, 255, img_noise)
return np.uint8(img_noise)
def wiener_filter(img,HH):
std_noise = np.median(np.abs(HH))/0.6745
sigma_noise = std_noise**2
sigma_img = (np.sum(img*img)-sigma_noise)/(img.shape[0]*img.shape[1])
img_no_noise = sigma_img/(sigma_img+sigma_noise)*img
return img_no_noise
def mutial_dwt2(img, index):
img = pywt.dwt2(img, 'bior4.4')
LL, (LH, HL, HH) = img
LH = wiener_filter(LH, HH)
HL = wiener_filter(HL, HH)
HH = wiener_filter(HH, HH)
if index > 1:
LL = mutial_dwt2(LL, index-1)
row, col = LL.shape
#小波重构可能会改变矩阵维数,进行统一
d1 = row - HH.shape[0]
d2 = col - HH.shape[1]
if d1 > 0 or d2 > 0:
d1 = row - np.arange(d1) - 1
d2 = col - np.arange(d2) - 1
LL = np.delete(LL, d1, axis=0)
LL = np.delete(LL, d2, axis=1)
img1 = pywt.idwt2((LL, (LH, HL, HH)), 'bior4.4')
return img1
if __name__ == '__main__':
img = cv2.imread('lena512color.tiff',cv2.IMREAD_GRAYSCALE)
cv2.imshow('original', img)
img_ = get_noise(img, 10)
cv2.imshow('noise', img_)
img1 = mutial_dwt2(img_, 5)
img1 = np.where(img1 < 0, 0, img1)
img1 = np.where(img1 > 255, 255, img1)
img1 = np.uint8(img1)
cv2.imshow('qz', img1)
cv2.imshow('o_n', normalization(np.uint8(np.abs(img_.astype('int16')-img.astype('int16')))))
cv2.imshow('o_q', normalization(np.uint8(np.abs(img1.astype('int16') - img.astype('int16')))))
cv2.waitKey(0)

















 229
229

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









