




 本文介绍了全方位图展开为普通图像的过程,并利用概率霍夫变换提取直线,特别是在走廊环境中的竖直线。首先,通过灰度化和二值化提取目标区域的中心,然后进行极坐标变换将全方位图展开。最后,应用概率Hough变换检测直线,以区分墙壁和地面的直线。
本文介绍了全方位图展开为普通图像的过程,并利用概率霍夫变换提取直线,特别是在走廊环境中的竖直线。首先,通过灰度化和二值化提取目标区域的中心,然后进行极坐标变换将全方位图展开。最后,应用概率Hough变换检测直线,以区分墙壁和地面的直线。
- 1.全方位图简述
图3-1左图所示,是一种全方位视觉相机,主要由反射镜面和单孔摄像机组成,周围光线经过反射镜反射后进入摄像头,经过摄像镜头折射成像,利用镜面反射原理,扩大视觉系统的视野。这种全向视觉系统成像十分迅速,一次成像可以提供360度的环境信息,图3-1右图为相机获得的图像。这种相机可以很好的应用于移动机器人视觉导航系统,具有十分重要的应用前景。

本文针对右图的全方位图像,将全方位图像展开为普通图像,并提取其中走廊环境中的竖直线。
- 2 中心提取
要想将全方位图像准确的转化为普通图像,首先需要获得目标区域的中心,将其作为极坐标的原点,针对本题,黑色环的内部图像即为我们的目标区域,区域中心的提取过程如下:
灰度化
将原全方位图变为灰度图,加快处理速度,方便后续操作,结果如图3-3 (a) 所示。
二值化
利用自己编写的函数Mat myBinary(const Mat &src, int min, int max),将灰度图变为二值图,选取阈值范围为80-210,将灰度值在80到210之间的像素灰度值变为255,其他变为0,结果如图3-3 (b)所示。
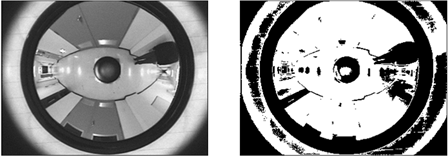
(a)灰度图 (b)二值图
图3-2 全方位图像处理
寻找轮廓
利用opencv库中的 findContours( ) 函数,从二值图中寻找到的轮廓线如图3-3(a) 所示。
最小包围圆
遍历图3-3(a) 中的所有轮廓线,使用opencv库中的minEnclosingCircle函数Void minEnclosingCircle
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2114
2114

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









