







 本文详细介绍了如何使用YOLOv5训练BDD100K自动驾驶数据集,包括数据预处理、环境配置、模型结构修改、迁移学习和性能评估,展示了迁移学习在目标检测中的应用和效果。
本文详细介绍了如何使用YOLOv5训练BDD100K自动驾驶数据集,包括数据预处理、环境配置、模型结构修改、迁移学习和性能评估,展示了迁移学习在目标检测中的应用和效果。
一、什么是BDD100K
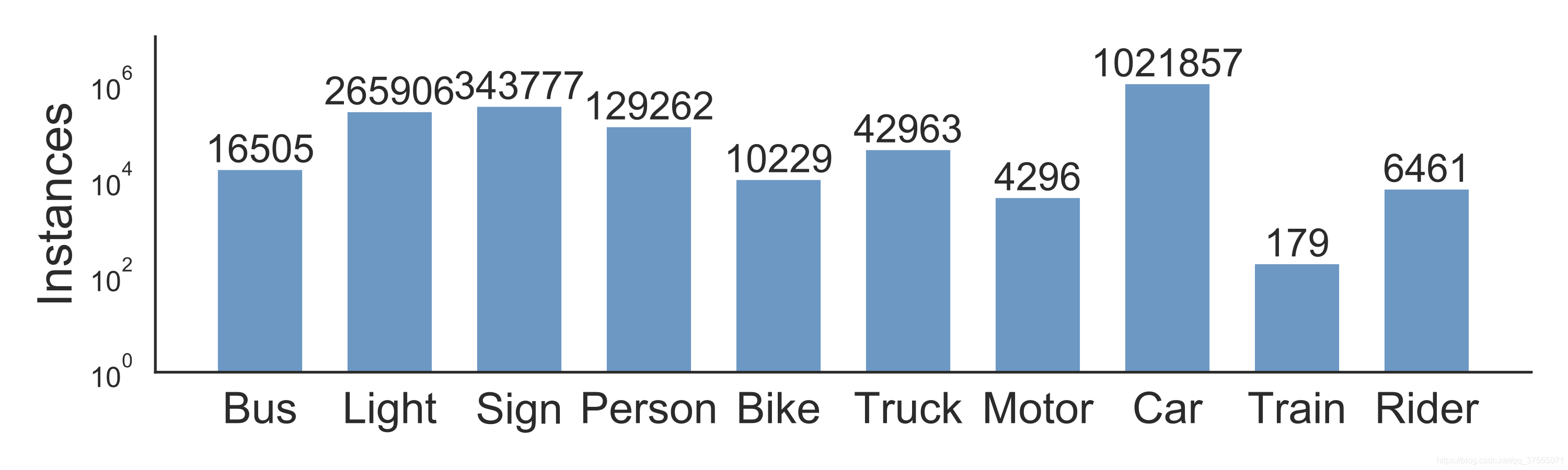
BDD100K是伯克利发布的开放式驾驶视频数据集,其中包含10万个视频和10个任务(因为把交通灯的颜色也区分了出来,实际上是13类分类任务),目的是方便评估自动驾驶图像识别算法的的进展。该数据集具有地理,环境和天气多样性,从而能让模型能够识别多种场景,具备更多的泛化能力。
由于硬件限制,我只里训练其中的图片数据,数据集按Train、Valid、Test三个部分,比例可以按照7:2:1分配,共近10张图片。
二、数据预处理
Bdd100k的标签是由Scalabel生成的JSON格式,虽然伯克利提供Bdd100k数据集的标签查看及标签格式转化工具。由于没有直接从bdd100k转换成YOLO的工具,因此我们首先得使用将bdd100k的标签转换为coco格式,然后再将coco格式转换为yolo格式。
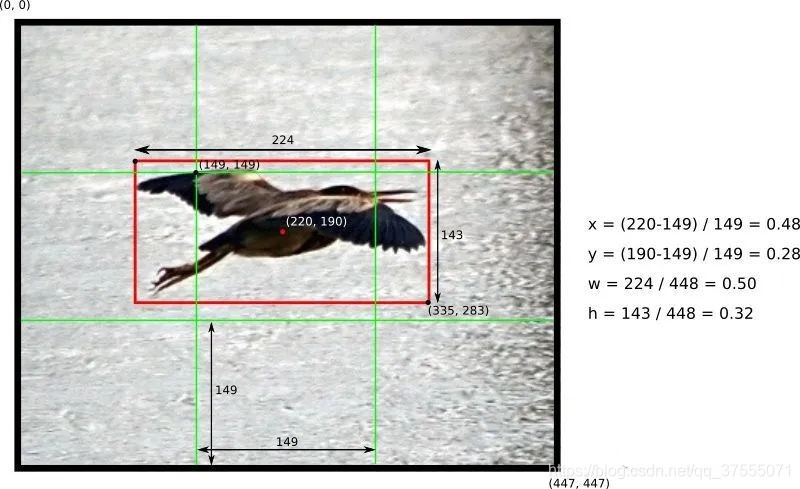
YOLO家族独特的标签数据集格式为:每个图片文件.jpg,都有同一命名的标签文件.txt。标签文件中每个对象独占一行,格式为
<object-class> <x> <y> <width> <height>。
其中:
<object-class>表示对象的类别序号:从0 到 (classes-1)。<x> <y> <width> <height>参照图片宽度和高度的相对比例(浮点数值),从0.0到1.0。
注意: 是矩形的中心,而不是左上角位置。
如下图所示:
(1)bdd 转化为coco格式
我的目的是识别包括不同颜色交通灯在内的所有交通对象,因此我们需要对原版的bdd2coco.py进行一些修改,以获取交通灯颜色并产生新的类别。这是修改完的核心代码:
for label in i['labels']:
annotation = dict()
category=label['category']
if (category == "traffic light"):
color = label['attributes']['trafficLightColor']
category = "tl_" + color
if category in id_dict.keys():
empty_image = False
annotation["iscrow 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 470
470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











