







边缘是指图像中像素灰度有阶跃变化或屋顶变化的像素的集合,存在于目标与背景、目标与目标、区域与区域之间,勾画出了目标物体的轮廓,使人们能对某种目标一目了然。
边缘一般分为:
- 阶跃边缘:两边像素的灰度明显不同,呈现出阶梯状
- 屋顶边缘:两边像素的灰度从逐步增加向逐步减少转变

常用的边缘检测算子有:
- 梯度算子
- Roberts算子
- Prewitt算子
- Sobel算子
- Kirsch算子
- Laplacian算子
- Marr算子
梯度算子


特点:仅计算相邻像素的灰度差,对噪声比较敏感,无法抑制噪声的影响。
Roberts算子
与梯度算子相似,但是计算方向不同,Roberts算子计算的是45°方向的梯度。

可以看出,其效果比梯度算子略好一点,也同样对噪声敏感,对边缘定位不准确,提取边缘线条较粗。
Prewitt算子
与梯度算子不同的是,Prewitt算子采用3×3大小,顾及了局部的整体情况的同时抑制了噪声的影响,边缘检测结果在水平方向和垂直方向均比Robert算子更加明显。

Sobel算子
与Prewitt算子类似,在四领域的权重为2,而其他像素的权值为1。Sobel算子在Prewitt算子的基础上增加了权重的概念,认为相邻点的距离远近对当前像素点的影响是不同的,距离越近的像素点对应当前像素的影响越大,从而实现图像锐化并突出边缘轮廓。
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息。因为Sobel算子结合了高斯平滑和微分求导(分化),因此结果会具有更多的抗噪性,当对精度要求不是很高时,Sobel算子是一种较为常用的边缘检测方法。

其能够进一步抑制噪声,但是检测的边缘较宽。
Kirsch算子(方向算子)
利用一组模板对图像中的同一像素求卷积,选取最大值最为该像素的边缘强度,对应的方向则为边缘方向。

特点:在计算边缘强度的同时可以得到边缘方向,各方向间的夹角为45°。
Nevitia算子
与Kirsch算子不同的是,它由12个模板,且各方向间的夹角为30°而不是45°。

拉普拉斯算子
拉普拉斯(Laplacian)算子是n维欧几里德空间中的一个二阶微分算子,常用于图像增强领域和边缘提取。它通过灰度差分计算邻域内的像素,基本流程是:判断图像中心像素灰度值与它周围其他像素的灰度值,如果中心像素的灰度更高,则提升中心像素的灰度;反之降低中心像素的灰度,从而实现图像锐化操作。在算法实现过程中,Laplacian算子通过对邻域中心像素的四方向或八方向求梯度,再将梯度相加起来判断中心像素灰度与邻域内其他像素灰度的关系,最后通过梯度运算的结果对像素灰度进行调整。

通过模板可以发现,当邻域内像素灰度相同时,模板的卷积运算结果为0;当中心像素灰度高于邻域内其他像素的平均灰度时,模板的卷积运算结果为正数;当中心像素的灰度低于邻域内其他像素的平均灰度时,模板的卷积为负数。对卷积运算的结果用适当的衰弱因子处理并加在原中心像素上,就可以实现图像的锐化处理。
由于梯度算子和拉普拉斯算子都对噪声敏感,因此一般用他们检测边缘之前要先对图像进行平滑。
特点:
优点:
- 各向同性、线性和位移不变的
- 对细线和孤立点检测效果较好
缺点:
- 对噪声敏感,对噪声有双倍加强的作用
- 不能检测出边的方向
- 常产生双像素的边缘
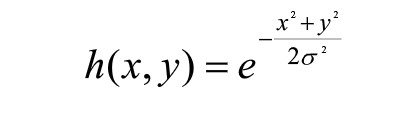
Marr算子
由于拉普拉斯算子在检测前需要平滑,于是在拉普拉斯基础上发展了Marr算子,平滑函数采用正态分布的高斯函数。



参考资料:
[Python图像处理] 十七.图像锐化与边缘检测之Roberts算子、Prewitt算子、Sobel算子和Laplacian算子















 5608
5608











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









