







一.实验环境
Vivado HLS 2018.3
Vivado 2018.3
Python
二.HLS实现
2.1缩放比例以及缩放算法
原始图片:1920*1080
处理图片:1080*720
缩放算法:双线性内插方法
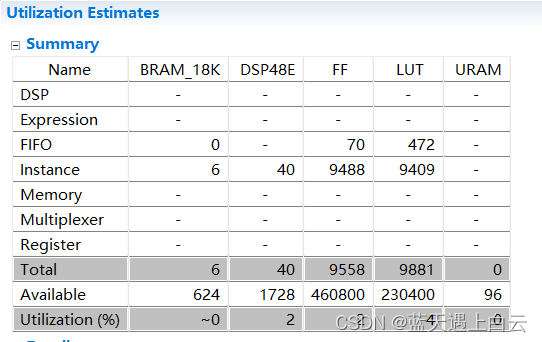
2.2资源评估
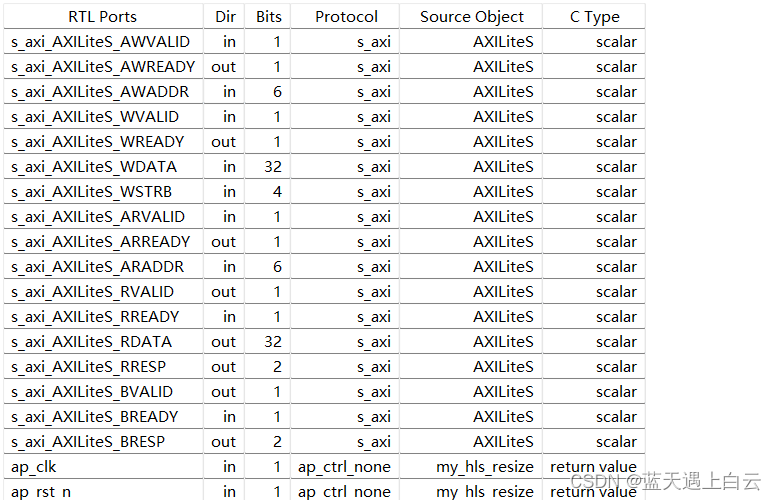
2.3接口类型
1.一路AXI4_LITE接口,用来配置该IP的寄存器
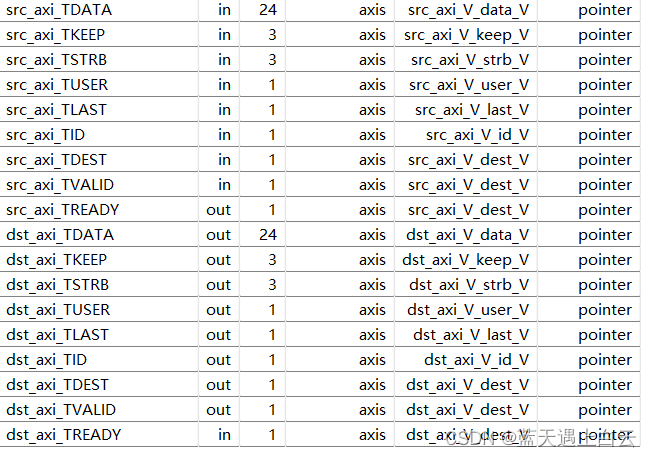
2.两路AXI4 Stream接口,该IP的视频流接口
2.4实现效果
2.5代码实现
2.5.1 top层代码
#include "top.h"
#define HLS_INTER_LINEAR 1
void my_hls_resize(AXI_STREAM& src_axi, AXI_STREAM& dst_axi, int src_rows, int src_cols,int dst_rows,int dst_cols)
{
#pragma HLS INTERFACE axis port=src_axi
#pragma HLS INTERFACE axis port=dst_axi
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE s_axilite port=src_rows
#pragma HLS INTERFACE s_axilite port=src_cols
#pragma HLS INTERFACE s_axilite port=dst_rows
#pragma HLS INTERFACE s_axilite port=dst_cols
int interpolation;
SRC_IMAGE imag_0(src_rows,src_cols);
DST_IMAGE imag_1(dst_rows, dst_cols);
#pragma HLS dataflow
hls::AXIvideo2Mat(src_axi, imag_0);
hls::Resize(imag_0,imag_1,interpolation=HLS_INTER_LINEAR );
hls::Mat2AXIvideo(imag_1, dst_axi);
}
变换模式可以选择。
2.6问题总结
1.vivado HLS部分电脑可能综合失败,这个由于安装了加密软件导致的
2.vivado HLS2018.3支持HLS VIDEO视频库,vitis2020.1 不再支持hls video 库,转而支持opencv函数库。opencv函数库的环境配置比较麻烦。
3.vivado hls 2018.3生成的IP可以在vivado 2018.3及以上版本通用。也就是可以使用包含有HLS video 视频库的版本所生成的IP直接在高版本的vivado上面使用。
4.vivado 2018.3不能导出IP是因为软件有BUG,此时可以打一个补丁。
三.Python转换
3.1将图片转换为TXT文件
3.1.1代码实现
import cv2 # h, w, c
import numpy
import matplotlib.pyplot as plt
img = cv2.imread("D:/Blog/resize/resize_tb/pic.bmp" , 1)
print("图像的形状,返回一个图像的(行数,列数,通道数):", img.shape)
print("图像的像素数目:", img.size)
print("图像的数据类型:", img.dtype)
#img = cv2.resize(img,(280,280)) 可以改变图片的大小
fname = open("D:/Blog/resize/resize_tb/pic.txt",'w')
# fname.write("图像的形状,返回一个图像的(行数,列数,通道数):"+str(img.shape)+'\n')
# fname.write("图像的像素数目:"+str(img.size)+'\n')
# fname.write("图像的数据类型:"+str(img.dtype)+'\n')
Ylenth = img.shape[1] # 图片列数
Xlenth = img.shape[0] # 图片行数
for i in range(Xlenth):
for j in range(Ylenth):
# fname.write(str(img[i][j][0])+','+str(img[i][j][1])+','+str(img[i][j][2])+'\n')
fname.write(hex(img[i][j][0])[2:]+hex(img[i][j][1])[2:]+hex(img[i][j][2])[2:]+'\n')
# fname.write('\n')
fname.close()
cv2.imshow('image',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
3.1.2实现效果
3.2将TXT文件转换为图片
3.2.1代码实现
# 这是一个文本转图片的python代码
import cv2
import numpy as np
def read_txt(path):
"""
读取txt文件,返回txt_data
"""
with open(path, 'rb') as f:
# 文件在with语句块结束时自动关闭
data = [(int(line.strip(), 16)) for line in f] # strip()用于去除每行末尾的换行符
return data
def list2mat(h,w,c,list_data):#高,宽,通道
img_array = np.zeros((h, w, c), dtype=np.uint8)
for i in range(h):
for j in range(w):
img_array[i, j, 2] = (list_data[i * w + j] & 0x00_00_ff) >> 0 # R
img_array[i, j, 1] = (list_data[i * w + j] & 0x00_ff_00) >> 8 # G
img_array[i, j, 0] = (list_data[i * w + j] & 0xff_00_00) >> 16 # B
return img_array
img_path = "output.jpg" # 400x400
txt_path = "pic.txt"
IMG_W = 1920
IMG_H = 1080
IMG_C = 3
# txt_path = "pic_out1.txt"
# IMG_W = 1080
# IMG_H = 608
# IMG_C = 3
# IMG_W = 512
# IMG_H = 512
# IMG_C = 3
data_list = read_txt(txt_path)
img_array = list2mat(IMG_H, IMG_W, IMG_C, data_list) # txt文件里面,低位为R
cv2.imshow('Image', img_array)
cv2.waitKey(0)
3.2.2实现效果
四.vivado逻辑仿真
4.1testbench平台的搭建
4.1.1例化该IP
4.1.2AXI4_LITE模块配置
4.1.3AXI4模块
4.2配置AXI4-LITE寄存器
HLS生成IP后,里面有一个driver文件夹,里面就是相应的AXI4_LITE寄存器的配置说明了
// ==============================================================
// File generated on Sat Apr 20 14:19:16 +0800 2024
// Vivado(TM) HLS - High-Level Synthesis from C, C++ and SystemC v2018.3 (64-bit)
// SW Build 2405991 on Thu Dec 6 23:38:27 MST 2018
// IP Build 2404404 on Fri Dec 7 01:43:56 MST 2018
// Copyright 1986-2018 Xilinx, Inc. All Rights Reserved.
// ==============================================================
// AXILiteS
// 0x00 : reserved
// 0x04 : reserved
// 0x08 : reserved
// 0x0c : reserved
// 0x10 : Data signal of src_rows
// bit 31~0 - src_rows[31:0] (Read/Write)
// 0x14 : reserved
// 0x18 : Data signal of src_cols
// bit 31~0 - src_cols[31:0] (Read/Write)
// 0x1c : reserved
// 0x20 : Data signal of dst_rows
// bit 31~0 - dst_rows[31:0] (Read/Write)
// 0x24 : reserved
// 0x28 : Data signal of dst_cols
// bit 31~0 - dst_cols[31:0] (Read/Write)
// 0x2c : reserved
// (SC = Self Clear, COR = Clear on Read, TOW = Toggle on Write, COH = Clear on Handshake)
#define XMY_HLS_RESIZE_AXILITES_ADDR_SRC_ROWS_DATA 0x10
#define XMY_HLS_RESIZE_AXILITES_BITS_SRC_ROWS_DATA 32
#define XMY_HLS_RESIZE_AXILITES_ADDR_SRC_COLS_DATA 0x18
#define XMY_HLS_RESIZE_AXILITES_BITS_SRC_COLS_DATA 32
#define XMY_HLS_RESIZE_AXILITES_ADDR_DST_ROWS_DATA 0x20
#define XMY_HLS_RESIZE_AXILITES_BITS_DST_ROWS_DATA 32
#define XMY_HLS_RESIZE_AXILITES_ADDR_DST_COLS_DATA 0x28
#define XMY_HLS_RESIZE_AXILITES_BITS_DST_COLS_DATA 32
4.3读取文本操作
reg [23:0] img [0:2073599];//根据自己图片大小
initial begin
$readmemh("D:/Blog/resize/resize_tb/pic.txt",img);
end4.4仿真数据写入TXT
integer file_out;
initial file_out = $fopen("D:/Blog/resize/resize_tb/pic_out.txt","w");
always@(posedge clk) begin
if(dst_axi_TVALID)
$fwrite(file_out,"%h\n",dst_axi_TDATA);
end















 6911
6911











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









