







前言
本章介绍如何实现迪文屏与飞凌OKT507的uart事件通信。
代码
从上到下是uart_example.c、dwin.c、dwin.h、makefile
#include "dwin.h"
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <termios.h>
#include <errno.h>
#include <sys/time.h>
#include <string.h>
#include <getopt.h>
#include "stdbool.h"
// #include "dwin.h"
// #include "//delay.h"
#define uint8_t u_int8_t
#define bool _Bool
extern void u8_to_char(uint8_t * , char ** );
extern int judge_dwin_cmd(uint8_t ** );
extern int get_len(uint8_t *cmd_u8);
extern dwin_event_flag uart_judge_dwin_event(i_dwin_cmd * cmd);
extern i_dwin_cmd temp_cmd_recv;
extern dwin_event_key event_key_list[EVENT_KEY_NUM_MAX];
extern dwin_event_key_spec event_key_spec[EVENT_KEY_SPEC_NUM_MAX];
// extern char* u8_to_char(uint8_t * );
extern c_dwin_cmd cmd_recv_char; // from dwin
extern c_dwin_cmd cmd_send_char; // send to dwin
extern dwin_event_flag c_judge_dwin_event(c_dwin_cmd * cmd);
extern void c_dwin_cmd_analysis(char * in,c_dwin_cmd *cmd);
extern void c_print_cmd(c_dwin_cmd *cmd);
// extern void print_uint8(uint8_t * in);
// #define false FALSE
// #define true TRUE
/* E53模块中
* UART0_RX_M0 -> GPIO0_B6
* UART0_TX_M0 -> GPIO0_B7
*/
#define UART_ID 0
#define UART_RECV_LEN 1024
#define BUF_RX_MAX 512
#define LEN_CHAR_TEMP 17
c_dwin_cmd cmd_char;
int search_str_end(uint8_t *str_z, int count)
{
int temp_zero = 1;
int temp_count = count -1; // 有效字符11个,12个是0x00
printf("init count = %d, temp_count = %d\n",count,temp_count);
uint8_t *str_temp1 = str_z;
while(1)
{
printf("str = [%02X], temp_zero = [%d], temp_count = [%d]\n",*str_temp1,temp_zero,temp_count);
// if find 10 zero, will return count
if(*str_temp1 != 0x00)
{
printf("value = %02X, %ld\n",*str_temp1,str_temp1-str_z);
temp_count += temp_zero;
str_temp1++;
temp_zero = 1;
}
else
{
temp_zero++;
printf("value = %02X, %ld\n",*str_temp1,str_temp1-str_z);
}
if(temp_zero > 10)
break;
}
printf("init count = %d, temp_count = %d\n",count,temp_count);
return temp_count;
}
int my_strlen(uint8_t *str)
{
printf("enter my_strlen");
uint8_t *str_temp = str;
// assert(str);
int count = 0;
// while (*str != '\0') // this will ignore 0x00
while (*str_temp != '\0')
{
printf("value = %02X, %ld\n",*str_temp,str_temp-str);
count++;
str_temp++;
}
// has found 0x00, str end. but uart data may contents 0x00 .. 0x00
// so, need to judge next value
count = search_str_end(str_temp-1,count);
// int temp_count = count;
// for(int i=0;i<10;i++)
// {
// if(*str_temp =='\0')
// {
// temp_count++;
// str_temp++;
// // printf("temp_count = %d\n",temp_count);
// }
// else
// break;
// }
// // printf("temp_count = %d,count=%d\n",temp_count,count);
// if(temp_count == count+10)
// printf("search 10 0x00 \n");
// else
// {
// printf("has find 0x00 \n");
// printf("end1 temp_count = %d,count=%d\n",temp_count,count);
// return temp_count;
// }
// printf("end 2 temp_count = %d,count=%d\n",temp_count,count);
return count;
}
int judge_char(uint8_t * str)
{
if (str != NULL){
// not empty
printf("enter judge_char");
if (my_strlen(str) != 0) {
// not '\0'
return 1;
}
else
return 0;
}
else
return -1;
}
// unsigned int uart_init(void)
// {
// unsigned int ret;
// UartAttribute attr;
// LzUartDeinit(UART_ID);
// attr.baudRate = 115200;
// attr.dataBits = UART_DATA_BIT_8;
// attr.pad = FLOW_CTRL_NONE;
// attr.parity = UART_PARITY_NONE;
// attr.rxBlock = UART_BLOCK_STATE_NONE_BLOCK;
// attr.stopBits = UART_STOP_BIT_1;
// attr.txBlock = UART_BLOCK_STATE_NONE_BLOCK;
// // 使用UART0
// PinctrlSet(GPIO0_PB6, MUX_FUNC2, PULL_KEEP, DRIVE_LEVEL2);
// PinctrlSet(GPIO0_PB7, MUX_FUNC2, PULL_KEEP, DRIVE_LEVEL2);
// ret = LzUartInit(UART_ID, &attr);
// if (ret <0)
// {
// printf("%s, %d: LzUartInit(%d) failed!\n", __FILE__, __LINE__, ret);
// return 1;
// }
// return 0;
// }
void func_uart_write(uint8_t * str, int fd)
{
printf("enter func_uart_write");
unsigned int ret;
// printf("Youkai : %s, %d: uart write!\n", __FILE__, __LINE__);
// plus 3 due to dwin has head1/2/len
ret = write(fd, str, *(str+2));
if (ret <0)
{
printf("%s, %d: LzUartInit(%d) failed!\n", __FILE__, __LINE__, ret);
return;
}
//delay(100);
}
// void print_uint8(uint8_t * in)
// {
// printf("----temp: len[%d]\t[",*(in+2));
// for(int i =0;i< 8;i++)
// {
// printf("%02X",*(in+i));
// }
// printf("]\n");
// }
void uint8_2_char(uint8_t * in,char * out, int cp_len)
{
// printf("----temp: len[%d]\t[",*(in+2));
printf("raw uint8_t data[");
int cmd_len=*(in+2)+3;
char tmp[3];
memset(tmp,0x00,3);
for(int i =0;i< cp_len;i++)
{
printf("%02X",*(in+i));
sprintf(tmp,"%02X",*(in+i));
strcat(out,tmp);
memset(tmp,0x00,3);
}
printf("]\n");
}
void main(void)
{
int fd;
int nread;
char buf_rx[BUF_RX_MAX+1];
int n=0,i=0;
// char* dev = NULL;
char dev[] = "/dev/ttyS5";
struct termios oldtio,newtio;
speed_t speed = B115200;
int next_option,havearg = 0,flow = 0;
/* 打开串口 */
fd = open(dev, O_RDWR | O_NONBLOCK| O_NOCTTY | O_NDELAY);
if (fd < 0) {
printf("Can't Open Serial Port!\n");
exit(0);
}
printf("Welcome to uart buf_tx\n");
//save to oldtio
tcgetattr(fd,&oldtio);
bzero(&newtio,sizeof(newtio));
newtio.c_cflag = speed|CS8|CLOCAL|CREAD;
newtio.c_cflag &= ~CSTOPB;
newtio.c_cflag &= ~PARENB;
newtio.c_iflag = IGNPAR;
newtio.c_oflag = 0;
// newtio.c_cc[VTIME]=10;
tcflush(fd,TCIFLUSH);
tcsetattr(fd,TCSANOW,&newtio);
tcgetattr(fd,&oldtio);
memset(buf_rx,0,BUF_RX_MAX+1);
char buf_tx[100]="forlinx_uart_test.1234567890...";
printf("Send buf_tx data:\n[%s] [%ld]\n",buf_tx,strlen(buf_tx));
write(fd, buf_tx, strlen(buf_tx));
fd_set rd;
int flag_rx=0;
bool flag_rx1= false;
bool flag_rx2 = false;
bool flag_print=true;
int cmd_len=0;
uint8_t str_send[UART_RECV_LEN] = "HelloWorld!\n";
char str_send_char[513] = "";
uint8_t recv_int8[UART_RECV_LEN];
char recv_char[UART_RECV_LEN];
uint8_t recv_int8_t[9];
char recv_char_t[LEN_CHAR_TEMP];
char *recv_char_p=NULL;
// char **recv_char_addr=&recv_char;
// status set true, will allow to send uart msg from xiaolinpai to dwin
bool status_uart_send = false;
init_dwin_status();
// dwin_cmd_init_send();
// i_dwin_cmd * p_cmd_send = &cmd_send;
// dwin_cmd_init_send(p_cmd_send);
// ------------------- test uint8 to char -------------------
uint8_t xxx[]={0X5A,0XA5,0X05,0X82,0X10,0X00,0X00,0X01};
// u8_2_char(xxx);
char *yyy=(char *)malloc(get_len(recv_int8));
u8_to_char(xxx,&yyy);
// yyy = (char *)u8_to_char(xxx);
printf("yyy = %s\n",yyy);
// ------------------- test uint8 to char -------------------
printf("enter while\n");
printf("youkai\n");
while (1)
{
// ----------------- uart write -----------------
// if(status_uart_send == true)
// {
// printf("enter send uart\n");
// // judge if str_send is empty
// // int temp = -1;
// // temp = judge_char(str_send);
// // if(temp == 1)
// if(*str_send != 0x00)
// {
// printf("func_uart_write before\n");
// func_uart_write(str_send,fd);
// printf("func_uart_write end\n");
// }
// memset(str_send,0x00,259);
// // if send ok,
// // status_uart_send = false;
// }
//delay(100);
// // printf("Youkai : %s, %d: uart write!\n", __FILE__, __LINE__);
// ret = write(UART_ID, str_send, my_strlen(str_send));
// if (ret <0)
// {
// printf("%s, %d: LzUartInit(%d) failed!\n", __FILE__, __LINE__, ret);
// return;
// }
// ----------------- uart read -----------------
memset(recv_int8_t,0x00,UART_RECV_LEN);
int nread = read(fd, recv_int8_t, UART_RECV_LEN);
if (nread > 0)
{
// 接收到的是字符串 "5AA5" 4
// printf("temp: len[%ld]\t[%s]\n",strlen(recv_int8_t),recv_int8_t);
// 接收到的是十六进制数 0x5AA5 2
// printf(">>>>%d,,%d\n",*recv_int8_t,*(recv_int8_t+1));
if(*recv_int8_t==0x5a && *(recv_int8_t+1)==0xa5)
{
cmd_len=*(recv_int8_t+2)+3;
cmd_len=2*cmd_len ;
printf("\ncmd len = %d\n",cmd_len);
// if(recv_char_p == NULL)
// {
// recv_char_p=(char*)malloc(cmd_len+1);
// }
}
// printf("uart read= %d\n",nread);
// sprintf(recv_char_t,"%02X",recv_int8_t);
memset(recv_char_t,0x00,LEN_CHAR_TEMP);
uint8_2_char(recv_int8_t,recv_char_t, nread);
// u8_to_char(recv_int8_t,&recv_char_t);
// printf("recv_char_t = [%s]\n",recv_char_t);
strcat(recv_char,recv_char_t);
// strcat(recv_char_p,recv_char_t);
printf("recv_char = [%s]\n",recv_char);
// // 获取长度,16进制传输
// int temp_len_i=get_len(recv_int8);
// printf("temp_len=%d\n",temp_len_i);
// printf("temp: len[%02x]\t[",*(recv_int8_t+2),recv_int8_t);
// 收到数据设置状态
flag_rx1=true;
flag_rx2=true;
}
else if(nread < 0 )
{
printf("%s, %d: LzUartInit(%d) failed!\n", __FILE__, __LINE__, nread);
return;
}
if(nread == 0)
{
// 判断传输停止
if(flag_rx1==true&&flag_rx2==true)
{
flag_rx2=false;
}
else if(flag_rx1==true&&flag_rx2==false)
{
flag_rx1=false;
printf("judge 1\n");
if(strlen(recv_char)>0)
{
printf("strlen = %ld _ cmd_len=%d\n",strlen(recv_char),cmd_len);
if(strlen(recv_char)==cmd_len)
// if(strlen(recv_char_p)==cmd_len)
{
printf(">>>recv_cmd_char = [%s]\n",recv_char);
// printf(">>>recv_cmd_char = [%s]\n",recv_char_p);
// c_judge_dwin_event(&cmd_recv_char);
// c_dwin_cmd_analysis(&recv_char_p,&cmd_recv_char);
c_dwin_cmd_analysis(recv_char,&cmd_recv_char);
// c_print_cmd(&cmd_recv_char);
// free(recv_char_p);
tcflush(fd, TCIOFLUSH);
}
memset(recv_char,0x00,UART_RECV_LEN);
}
}
}
}
close(fd);
return;
}
#include "dwin.h"
// DATA FORMAT: head + date len + write/read + addr + read_len / write_value
// 5A A5 + + 82/83 + 3000 + 01 / 3132
// ps: date_len = write/read(1) + addr(2) + read_len / write_value(1/2)
// date_len is the number bytes of end date_len
#define DWIN_CMD_HEAD_1 0x5A//{0x5A,0XA5}//"\x5A\xA5"
#define DWIN_CMD_HEAD_2 0xA5
#define DWIN_CMD_WRITE 0x82
#define DWIN_CMD_READ 0x83
#define DWIN_CMD_OK "5AA503824F4B\0"
#define DWIN_CMD_POINT_HEAD1 0
#define DWIN_CMD_POINT_HEAD2 1
#define DWIN_CMD_POINT_LEN 2
#define DWIN_CMD_POINT_WR 3
#define DWIN_CMD_POINT_ADDR1 4
#define DWIN_CMD_POINT_ADDR2 5
#define DWIN_CMD_POINT_VALUE 6
// -------------------- data --------------------
// case 1
// malloc char menber to save dwincmd by char format
// char * dwin_cmd_char_temp;
// case 2
char dwin_cmd_char_temp[DWIN_CMD_CHAR_MAX];
uint8_t dwin_cmd_u8_temp[DWIN_CMD_U8_MAX];
char * dwin_cmd_char_value;
char temp_c[3];
i_dwin_cmd temp_cmd_recv; // from dwin
i_dwin_cmd temp_cmd_send; // send to dwin
c_dwin_cmd cmd_recv_char; // from dwin
c_dwin_cmd cmd_send_char; // send to dwin
dwin_event_key event_key_list[EVENT_KEY_NUM_MAX]={
// {
// event_flag, event_name,
// event_status,
// event_addr, event_flag_name,
// event_ops1, enent_ops1
// },
{
EVENT_FLAG_AUDIO_RECORD, "record",
EVENT_FLAG_STATUS_STOP,
"1503", "EVENT_FLAG_AUDIO_RECORD",
func_open_record, func_close_record
},
{
EVENT_FLAG_CAM_SCAN, "cam",
EVENT_FLAG_STATUS_STOP,
"1504", "EVENT_FLAG_CAM_SCAN",
func_open_cam, func_close_cam
},
{
EVENT_FLAG_NFC_SCAN, "nfc",
EVENT_FLAG_STATUS_STOP,
"1505", "EVENT_FLAG_NFC_SCAN",
func_open_nfc, func_close_nfc
},
{
EVENT_FLAG_UNKOWN, "unknow",
EVENT_FLAG_STATUS_STOP,
"0000" , "EVENT_FLAG_UNKOWN"
}
};
dwin_event_key_spec event_key_spec[EVENT_KEY_SPEC_NUM_MAX]=
{
// special event, just one ops
// {
// event_key, event_name,
// event_ops
// },
{
"1502010012", "search",
func_search
},
// ...
{EVENT_KEY_SPEC_VALUE, "end",
func_spec_end
}
};
// -------------------- event func --------------------
// function
void func_open_record()
{
printf("--- func_record_open\n");
return;
}
void func_close_record()
{
printf("--- func_close_record\n");
return;
}
// function
void func_open_cam()
{
printf("--- func_cam_open\n");
return;
}
void func_close_cam()
{
printf("--- func_close_cam\n");
return;
}
// function
void func_open_nfc()
{
printf("--- func_nfc_open\n");
return;
}
void func_close_nfc()
{
printf("--- func_close_nfc\n");
return;
}
void func_search()
{
printf("--- func_search\n");
return;
}
void func_spec_end()
{
printf("--- func_spec_end\n");
return;
}
// void (*func)();
// -------------------- dwin func --------------------
void init_dwin_status()
{
printf("set all status stop\n");
dwin_event_key * temp_key;
temp_key = &event_key_list[0];
for(int i =0; temp_key->flag != EVENT_FLAG_UNKOWN; i++)
{
temp_key = &event_key_list[i];
temp_key->status = EVENT_FLAG_STATUS_STOP;
}
return;
}
//---------------------------------------------------------
// FOR uint8_t data 0x5AA5..
//
//
//
//---------------------------------------------------------
// cmd save as uint_8
void i_dwin_cmd_clear(i_dwin_cmd * cmd)
{
cmd->head[0]=DWIN_CMD_HEAD_1;
cmd->head[1]=DWIN_CMD_HEAD_2;
cmd->len = 0x00;
cmd->wr = 0x00;
cmd->addr[0] = 0x00;
cmd->addr[1] = 0x00;
cmd->value = NULL;
if(cmd->cmd_u8 != NULL)
{
free(cmd->cmd_u8);
cmd->cmd_u8 = NULL;
}
if(cmd->cmd_char != NULL)
{
free(cmd->cmd_char);
cmd->cmd_char = NULL;
}
// memset(cmd->cmd_u8,0x00,DWIN_CMD_LEN_U8_MAX);
// cmd->cmd_char = NULL;
return;
}
void dwin_cmd_init_send()
{
i_dwin_cmd_clear(&temp_cmd_recv);
temp_cmd_recv.wr = DWIN_CMD_WRITE;
temp_cmd_recv.cmd_char = NULL;
temp_cmd_recv.cmd_u8 = NULL;
// memset(temp_cmd_recv.cmd_char,0x00,DWIN_CMD_CHAR_MAX);
// memset(temp_cmd_recv.cmd_u8,0x00,DWIN_CMD_LEN_U8_MAX);
return;
}
// TOTO
// analysis u8 cmd to save in cmd
void uart_dwin_cmd_analysis(uint8_t *in_u8_raw)
{
// 1. judge cmd is dwin head
uint8_t *cmd_temp = in_u8_raw;
if(*(cmd_temp+DWIN_CMD_POINT_HEAD1) == DWIN_CMD_HEAD_1
&& *(cmd_temp+DWIN_CMD_POINT_HEAD2)== DWIN_CMD_HEAD_2)
{
printf("this is dwin cmd\n");
i_dwin_cmd_clear(&temp_cmd_recv);
// 1. save cmd msg
temp_cmd_recv.len = *(cmd_temp + DWIN_CMD_POINT_LEN);
temp_cmd_recv.wr = *(cmd_temp + DWIN_CMD_POINT_WR);
temp_cmd_recv.addr[0] = *(cmd_temp + DWIN_CMD_POINT_ADDR1);
temp_cmd_recv.addr[1] = *(cmd_temp + DWIN_CMD_POINT_ADDR2);
temp_cmd_recv.value = cmd_temp + DWIN_CMD_POINT_VALUE;
// temp_cmd_recv.cmd_u8 = dwin_cmd_u8_temp;
// case1:
// copy_u8_2_u8(cmd_temp);
//case2:
temp_cmd_recv.cmd_u8 = u8_to_u8(in_u8_raw);
// print_dwin_cmd(temp_cmd_recv);
// uint8_t to char , save in cmd struct
// case1:
// temp_cmd_recv.cmd_char = dwin_cmd_char_temp;
// memset(temp_cmd_recv.cmd_char,0x00,DWIN_CMD_CHAR_MAX);
//case2:
char *temp_c=NULL;
u8_to_char(in_u8_raw,&temp_c);
if(temp_c!= NULL)
temp_cmd_recv.cmd_char = temp_c;
else
printf("temp_c is null");
printf("temp_cmd_recv.cmd_char");
// dwin_cmd_uint8_t2char(temp_cmd_recv);
// printf("dwin cmd char = %s\n",temp_cmd_recv.cmd_char);
// 2. event judge
uart_judge_dwin_event(&temp_cmd_recv);
printf("uart_judge_dwin_event");
}
return;
}
// TOTO
dwin_event_flag uart_judge_dwin_event(i_dwin_cmd * cmd)
{
printf("\nenter uart_judge_dwin_event\n");
// print_dwin_cmd(*cmd);
printf("cmd str = %s\n",cmd->cmd_char);
// 1. judge ok
if(strcmp(cmd->cmd_char,DWIN_CMD_OK) == 0)
{
printf("recv ok\n");
// get ok, stop send
// status_uart_send = false;
return EVENT_FLAG_OK;
}
// 2. judge event
printf("\nenter uart_judge_dwin_event\n");
dwin_event_key * temp_value ;
temp_value = &event_key_list[0];
for(int i = 0; temp_value->flag != EVENT_FLAG_UNKOWN ; i++)
{
// +8 choose add
// printf("search=%s,key=%s\n",cmd->cmd_char + DWIN_CMD_CHAR_ADDR_VALUE ,temp_value.key);
// can't use strcmp, due to uart data may have double 0x00
if(strstr(cmd->cmd_char + DWIN_CMD_CHAR_ADDR_VALUE, temp_value->key) != NULL)
{
printf("searched key= %s, value=%d, name=%s\n",temp_value->key,temp_value->flag,temp_value->flag_name);
if(strstr(cmd->cmd_char + DWIN_CMD_CHAR_VALUE_VALUE, "010001") != NULL)
{
printf("status set open\n");
if(temp_value->open != NULL )
{
temp_value->open();
temp_value->status = EVENT_FLAG_STATUS_ING;
printf("%s status change: stop -> ing\n",temp_value->event_name);
}
}
if(strstr(cmd->cmd_char + DWIN_CMD_CHAR_VALUE_VALUE, "010000") != NULL)
{
printf("status set close\n");
if(temp_value->close != NULL )
{
temp_value->close();
temp_value->status = EVENT_FLAG_STATUS_STOP;
printf("%s status change: ing -> stop\n",temp_value->event_name);
}
}
// change_dwin_status(temp_value->flag);
// change_dwin_status_key(temp_value);
printf("has find match key, event = [%s]\n\n",temp_value->event_name);
return temp_value->flag;
}
temp_value = &event_key_list[i];
}
printf("hasn't find match key\n");
searc_spec_event(cmd);
return EVENT_FLAG_UNKOWN;
}
void searc_spec_event(i_dwin_cmd * cmd)
{
printf("search spec event\n");
dwin_event_key_spec * temp_value ;
temp_value = &event_key_spec[0];
// printf("spec event key = %s\n",temp_value->key);
for(int i = 0; strcmp(temp_value->key,EVENT_KEY_SPEC_VALUE) != 0 && i<EVENT_KEY_SPEC_NUM_MAX ; i++)
{
// printf("spec event key = %s\n",temp_value->key);
// printf("spec event value = %s\n",cmd->cmd_char + DWIN_CMD_CHAR_ADDR_VALUE);
if(strstr(cmd->cmd_char + DWIN_CMD_CHAR_ADDR_VALUE, temp_value->key ) != NULL)
{
temp_value->func();
printf("find spec event: {value = %s,\tname = %s,\ttemp_value}\n",temp_value->key,temp_value->event_name);
return;
}
temp_value = &event_key_spec[i];
}
printf("unfind spec key\n");
return;
}
// -------------------- basic func --------------------
char * uint8_t2char(uint8_t value)
{
memset(temp_c,0x00,3);
sprintf(temp_c, "%02X", value);
// printf("temp_c = [%s]\n",temp_c);
return temp_c;
}
void print_dwin_cmd(i_dwin_cmd cmd)
{
printf("len=%02X\n",cmd.len);
printf("wr=%02X\n",cmd.wr);
printf("addr=%02x_%02X\n",cmd.addr[0],cmd.addr[1]);
printf("value=%s\n",cmd.cmd_char);
return;
}
// 串口数据从uint8转换位char,例如0x5AA5,转换为字符串”5AA5“,由2字节转换为4字节
// malloc buffer and return buffer addr
void u8_to_char(uint8_t * in_u8, char ** out)
{
uint8_t * temp_cmd_u8 = in_u8;
int len_u8 = *(in_u8 + DWIN_CMD_POINT_LEN ) + 3; // +3 head12/len
int len_char = 2*len_u8 +1; // +1 '\0'
printf("cmd_u8 len_u8=%d,len_char=%d\n",len_u8,len_char);
// printf("0\n");
// *out = (char *)malloc(len_char);
// printf("1\n");
memset(*out,0x00,len_char);
// printf("2\n");
for(int i=0;i<len_u8;i++)
{
// printf("i=%d\n",i);
uint8_t temp_int8=*(in_u8+i);
// printf("temp_int8 = %02x\n",temp_int8);
uint8_t2char( temp_int8 );
// printf("before strcat\n");
strcat(*out,temp_c);
// printf(">>end strcat\n");
// temp_cmd_u8++;
}
// strcat(cmd_char_t,'\0');
// *(temp_char + len_char -1) = '\0';
printf("u8_to_char out = [%s] \n",*out);
// printf("temp_char end\n");
return;
}
uint8_t * u8_to_u8(uint8_t * in_u8)
{
uint8_t * temp_in_u8 = in_u8;
int len_u8 = *(in_u8 + DWIN_CMD_POINT_LEN) + 3;
printf("cmd_u8 len_u8=%d\n",len_u8);
uint8_t * temp_out_u8 = (uint8_t *)malloc(len_u8);
for(int i=0;i<len_u8;i++)
{
*(temp_out_u8 +i) = *(temp_in_u8 +i);
}
return temp_out_u8;
}
// -------------------- delete func --------------------
void change_dwin_status_key(dwin_event_key *in_key)
{
printf("change status \n");
if(in_key->status == EVENT_FLAG_STATUS_ING)
{
in_key->status = EVENT_FLAG_STATUS_STOP;
printf("%s status change: ing -> stop\n",in_key->event_name);
return;
}
else if(in_key->status == EVENT_FLAG_STATUS_STOP){
in_key->status = EVENT_FLAG_STATUS_ING;
printf("%s status change: stop -> ing\n",in_key->event_name);
return;
}
else
printf("error event_flag for %s\n",in_key->event_name);
printf("unknown event\n");
return;
}
void save_cmd_u8(i_dwin_cmd * cmd)
{
uint8_t * p = cmd->cmd_u8;
*(p+DWIN_CMD_POINT_HEAD1) = cmd->head[0];
*(p+DWIN_CMD_POINT_HEAD2 ) = cmd->head[1];
*(p+DWIN_CMD_POINT_LEN ) = cmd->len;
*(p+DWIN_CMD_POINT_WR ) = cmd->wr;
*(p+DWIN_CMD_POINT_ADDR1 ) = cmd->addr[0];
*(p+DWIN_CMD_POINT_ADDR2 ) = cmd->addr[1];
return;
// *(p+2)
}
char * uint8_t2char_list(uint8_t * p_dwin_u8_value,int len)
{
char * p_dwin_char_value = dwin_cmd_char_value;
for(int i=0; i<len; i++)
{
strcat(p_dwin_char_value,uint8_t2char(*p_dwin_u8_value));
p_dwin_u8_value++;
p_dwin_char_value = p_dwin_char_value + 2;
}
*(p_dwin_char_value +1 )= '\0';
return dwin_cmd_char_value;
}
int dwin_event_cmp(uint8_t * value ,uint8_t *match)
{
uint8_t * p_value = value;
uint8_t * p_match = match;
for(int i=0;i<4;i++)
{
if(*p_value == *p_match)
{
p_value++;
p_match++;
}
else
{
printf("dont match\n");
return 0;
}
printf(" matched \n");
return 1;
}
return 0;
}
/*
func1: uint8_t change to char
0x5A A5 04 83 10 00 01
"5AA50483100001"
func2: judge uint8_t
if(str[X] == 0x5A)
*/
char * dwin_cmd_uint8_t2char(i_dwin_cmd cmd)
{
print_dwin_cmd(cmd);
// case1: malloc
// int cmd_len = cmd.len;
// int malloc_len = (cmd_len + 3) *2 +1;
// printf("malloc %d\n",malloc_len);
// dwin_cmd_char_temp = (char*)malloc( malloc_len);
// case2: char array
memset(dwin_cmd_char_temp,0x00,DWIN_CMD_CHAR_MAX);
// point to char value pos
dwin_cmd_char_value = dwin_cmd_char_temp + 2*DWIN_CMD_POINT_VALUE;
// 1. head
strcat(dwin_cmd_char_temp,"5AA5");
// printf("dwin_cmd_char_temp = %s\n",dwin_cmd_char_temp);
// 2. len
uint8_t2char(cmd.len);
strcat(dwin_cmd_char_temp,temp_c);
// 3. wr
uint8_t2char(cmd.wr);
strcat(dwin_cmd_char_temp,temp_c);
// 4. addr
uint8_t2char(cmd.addr[0]);
strcat(dwin_cmd_char_temp,temp_c);
uint8_t2char(cmd.addr[1]);
strcat(dwin_cmd_char_temp,temp_c);
// printf("dwin_cmd_char_temp = %s\n",dwin_cmd_char_temp);
// 5. addr
uint8_t2char_list(cmd.value,cmd.len - 3); // 3 due to addr(2) + wr(1)
printf("dwin_cmd_char_temp = %s\n",dwin_cmd_char_temp);
return dwin_cmd_char_temp;
}
/*
func1: uint8_t change to char
0x5A A5 04 83 10 00 01
"5AA50483100001"
func2: judge uint8_t
if(str[X] == 0x5A)
*/
void uart_recv_value_cut(uint8_t * recv_all)
{
// dwin_cmd_sizeof = sizeof(recv_all);
int dwin_cmd_sizeof = strlen(recv_all);
//ERROR may: my_strlen
printf("dwin_cmd_sizeof = %d\n",dwin_cmd_sizeof);
//p = (int*)malloc(sizeof(int) * n);
char * dwin_cmd_charlist;
dwin_cmd_charlist = (char*)malloc( dwin_cmd_sizeof *2 +1);
memset(dwin_cmd_charlist,0x00,dwin_cmd_sizeof);
for(int i = 0;i<dwin_cmd_sizeof;i++)
{
printf("i = [ %d ]\n",i);
uint8_t temp_uc = recv_all[i];
char temp_c[3] = "00";
//ERROR, may set 2
if(temp_uc != 0x00)
sprintf(temp_c, "%02X", temp_uc);
else
{
printf("uc is 0x00\n");
// temp_c[0] = '0';
// temp_c[1] = '0';
// temp_c = "00";
}
printf("temp_c = [ %s ]\n",temp_c);
strcat(dwin_cmd_charlist,temp_c);
//strcat(dwin_cmd_charlist,'\0');
}
printf("dwin_cmd_charlist %s \n",dwin_cmd_charlist);
printf("end display");
// if(recv_all[0]==DWIN_CMD_HEAD_1 && recv_all[1]==DWIN_CMD_HEAD_2)
// {
// printf("this is dwin cmd %s\n",(char)recv_all);
// dwin_cmd_len = recv_all[2];
// dwin_cmd_wr = recv_all[3];
// dwin_cmd_addr[0] = recv_all[4];
// dwin_cmd_addr[1] = recv_all[5];
// dwin_cmd_data_len = recv_all[6];
// dwin_cmd_data_value = recv_all+7;
// printf("dwin_cmd_len %02X\n",dwin_cmd_len);
// printf("dwin_cmd_wr %02X\n",dwin_cmd_wr);
// printf("dwin_cmd_addr[0] %02X\n",dwin_cmd_addr[0]);
// printf("dwin_cmd_addr[1] %02X\n",dwin_cmd_addr[1]);
// printf("dwin_cmd_data_len %02X\n",dwin_cmd_data_len);
// sprintf(dwin_cmd_charlist, "%02X", dwin_cmd_len);
// printf("dwin_cmd_charlist %s\n",dwin_cmd_charlist);
// // printf(" %x\n",);
// // printf(" %x\n",);
// // if(recv_all[0]==0x5A)
// }
free(dwin_cmd_charlist);
printf("end func");
return ;
}
void copy_u8_2_u8(uint8_t * u8_raw)
{
memset(dwin_cmd_u8_temp,0x00,DWIN_CMD_CHAR_MAX);
uint8_t * p_raw = u8_raw;
uint8_t * p_end = dwin_cmd_u8_temp;
int len = *(u8_raw + DWIN_CMD_POINT_LEN) + 3;
for(int i=0;i<len;i++)
{
*(p_end +i) = *(p_raw +i);
// p_raw++;
// p_end++;
}
return;
}
//---------------------------------------------------------
// FOR char: "5AA5.."
//
//
//
//---------------------------------------------------------
// ADD FOR LINUX DIWN
int judge_dwin_cmd(uint8_t **in_u8_raw)
{
// 1. judge cmd is dwin head
printf("judge_dwin_cmd=[%s]\n",*in_u8_raw);
uint8_t *cmd_temp = *in_u8_raw;
if(*(cmd_temp+DWIN_CMD_POINT_HEAD1) == DWIN_CMD_HEAD_1
&& *(cmd_temp+DWIN_CMD_POINT_HEAD2)== DWIN_CMD_HEAD_2)
{
printf("this is dwin cmd\n");
return 1;
}
else
return 0;
}
int get_len(uint8_t *cmd_u8)
{
int len = *(cmd_u8 + 2);
// printf("len = %d\n",len);
return len;
}
// cmd save with char
void c_dwin_cmd_clear(c_dwin_cmd * cmd)
{
printf("clear cmd value\n");
strncpy(cmd->head,"5AA5",4);
strncpy(cmd->len,"00",2);
strncpy(cmd->wr,"83",2);
strncpy(cmd->addr,"0000",4);
cmd->value = NULL;
cmd->cmd_char = NULL;
// memset(cmd->cmd_u8,0x00,DWIN_CMD_LEN_U8_MAX);
// cmd->cmd_char = NULL;
return;
}
void print_uint8(uint8_t * in)
{
printf("----temp: len[%d]\t[",*(in+2));
for(int i =0;i< 8;i++)
{
printf("%02X",*(in+i));
}
printf("]\n");
}
void c_print_cmd(c_dwin_cmd *cmd)
{
printf("print cmd value\n");
printf("head | len | wr | addr | value | all\n");
printf("%s | %s | %s | %s | %s | %s\n",cmd->head,cmd->len,cmd->wr,cmd->addr,cmd->value,cmd->cmd_char);
return;
}
void c_dwin_cmd_analysis(char * in,c_dwin_cmd *cmd)
{
// 1. judge cmd is dwin head
char *cmd_temp = in;
printf("this is dwin cmd\n");
c_dwin_cmd_clear(cmd);
// 1. save cmd msg
printf("save cmd value\n");
// printf("len=%s\n",(in+C_CMD_POINT_LEN));
strncpy(cmd->len,in+C_CMD_POINT_LEN,2);
strncpy(cmd->wr,in+C_CMD_POINT_WR,2);
strncpy(cmd->addr,in+C_CMD_POINT_ADDR,4);
// strncpy(cmd->value,in+C_CMD_POINT_LEN,);
cmd->value=(in+C_CMD_POINT_VALUE);
cmd->cmd_char=in;
c_print_cmd(cmd);
// 2. event judge
c_judge_dwin_event(cmd);
return;
}
void c_searc_spec_event(c_dwin_cmd * cmd)
{
printf("search spec event\n");
dwin_event_key_spec * temp_value ;
temp_value = &event_key_spec[0];
// printf("spec event key = %s\n",temp_value->key);
for(int i = 0; strcmp(temp_value->key,EVENT_KEY_SPEC_VALUE) != 0 && i<EVENT_KEY_SPEC_NUM_MAX ; i++)
{
// printf("spec event key = %s\n",temp_value->key);
// printf("spec event value = %s\n",cmd->cmd_char + DWIN_CMD_CHAR_ADDR_VALUE);
if(strstr(cmd->cmd_char + DWIN_CMD_CHAR_ADDR_VALUE, temp_value->key ) != NULL)
{
temp_value->func();
printf("find spec event, value = %s, name = %s\n",temp_value->key,temp_value->event_name);
return;
}
temp_value = &event_key_spec[i];
}
printf("unfind spec key\n");
return;
}
dwin_event_flag c_judge_dwin_event(c_dwin_cmd * cmd)
{
printf("\nenter c_judge_dwin_event\n");
// print_dwin_cmd(*cmd);
printf("cmd str = [%s]\n",(cmd->cmd_char));
// 1. judge ok
if(strcmp((cmd->cmd_char),DWIN_CMD_OK) == 0)
{
printf("recv ok\n");
// get ok, stop send
// status_uart_send = false;
return EVENT_FLAG_OK;
}
// 2. judge event
printf("\nenter c_judge_dwin_event\n");
dwin_event_key * temp_value ;
temp_value = &event_key_list[0];
for(int i = 0; temp_value->flag != EVENT_FLAG_UNKOWN ; i++)
{
// +8 choose add
// printf("search=%s,key=%s\n",*(cmd->cmd_char) + DWIN_CMD_CHAR_ADDR_VALUE ,temp_value.key);
// can't use strcmp, due to uart data may have double 0x00
if(strstr((cmd->addr), temp_value->key) != NULL)
{
printf("searched key= %s, value=%d, name=%s\n",temp_value->key,temp_value->flag,temp_value->flag_name);
if(strstr((cmd->value) , "010001") != NULL)
{
printf("status set open\n");
if(temp_value->open != NULL )
{
temp_value->open();
temp_value->status = EVENT_FLAG_STATUS_ING;
printf("%s status change: stop -> ing\n",temp_value->event_name);
}
}
if(strstr((cmd->cmd_char) , "010000") != NULL)
{
printf("status set close\n");
if(temp_value->close != NULL )
{
temp_value->close();
temp_value->status = EVENT_FLAG_STATUS_STOP;
printf("%s status change: ing -> stop\n",temp_value->event_name);
}
}
// change_dwin_status(temp_value->flag);
// change_dwin_status_key(temp_value);
printf("has find match key, event = [%s]\n\n",temp_value->event_name);
return temp_value->flag;
}
temp_value = &event_key_list[i];
}
printf("hasn't find match key\n");
c_searc_spec_event(cmd);
return EVENT_FLAG_UNKOWN;
}
#include "stddef.h"
#include "string.h"
#include "stdio.h"
#include "stdlib.h"
#include "stdbool.h"
#include "stdint.h"
#define TRUE 1
#define FALSE 0
#define uint8_t u_int8_t
#define bool _Bool
typedef enum{
EVENT_FLAG_OK = 0X0,
EVENT_FLAG_AUDIO_RECORD = 0x3,
EVENT_FLAG_AUDIO_PLAY = 0x4,
EVENT_FLAG_CAM_SCAN = 0x5,
EVENT_FLAG_NFC_SCAN = 0x6,
EVENT_FLAG_BOOK_SEARCH = 0x10,
EVENT_FLAG_BOOK_INPUT = 0x11,
EVENT_FLAG_UNKOWN = -1,
}dwin_event_flag;
typedef enum{
// EVENT_FLAG_STATUS_START = 0x0,
EVENT_FLAG_STATUS_ING = TRUE,
EVENT_FLAG_STATUS_STOP = FALSE,
EVENT_FLAG_STATUS_ERROR = -1,
}dwin_event_flag_status;
typedef enum{
EVENT_TYPE_DWIN_SEND = 0x0, // uart read
EVENT_FLAG_DWIN_RECV = 0x1, // uart write
}dwin_event_type;
#define DWIN_CMD_LEN_U8_MAX 259
typedef struct
{
uint8_t head[2];
uint8_t len;
uint8_t wr;
uint8_t addr[2];
uint8_t * value;
// uint8_t cmd_u8[DWIN_CMD_LEN_U8_MAX];
uint8_t * cmd_u8;
char * cmd_char;
}i_dwin_cmd;
void uart_recv_value_cut(uint8_t * recv_all);
// dwin_event_flag uart_judge_dwin_event(char *str);
dwin_event_flag uart_judge_dwin_event(i_dwin_cmd * cmd);
void print_dwin_cmd(i_dwin_cmd cmd);
char * dwin_cmd_uint8_t2char(i_dwin_cmd cmd);
char * uint8_t2char(uint8_t value);
char * uint8_t2char_list(uint8_t * p_dwin_u8_value,int len);
void change_dwin_status(dwin_event_flag event_flag);
// UART recv/send judge dwin_event
#define EVENT_KEY_NUM_MAX 10
// #define EVENT_KEY_MAX -1
// function
void func_open_record();
void func_close_record();
void func_open_cam();
void func_close_cam();
void func_open_nfc();
void func_close_nfc();
#define EVENT_NAME_MAX 11
#define EVENT_FLAG_NAME_MAX 30
#define EVENT_KEY_VALUE_MAX 11 //"3000 0001" is 8
typedef struct
{
dwin_event_flag flag;
char event_name[EVENT_NAME_MAX];
dwin_event_flag_status status;
char key[EVENT_KEY_VALUE_MAX]; // key[0,3] addr key[4,7] value
char flag_name[EVENT_FLAG_NAME_MAX];
void (*open)();
void (*close)();
}dwin_event_key;
dwin_event_key event_key_list[EVENT_KEY_NUM_MAX];
// {
// // {
// // event_flag, event_name,
// // event_status,
// // event_addr, event_flag_name,
// // event_ops1, enent_ops1
// // },
// {
// EVENT_FLAG_AUDIO_RECORD, "record",
// EVENT_FLAG_STATUS_STOP,
// "1503", "EVENT_FLAG_AUDIO_RECORD",
// func_open_record, func_close_record
// },
// {
// EVENT_FLAG_CAM_SCAN, "cam",
// EVENT_FLAG_STATUS_STOP,
// "1504", "EVENT_FLAG_CAM_SCAN",
// func_open_cam, func_close_cam
// },
// {
// EVENT_FLAG_NFC_SCAN, "nfc",
// EVENT_FLAG_STATUS_STOP,
// "1505", "EVENT_FLAG_NFC_SCAN",
// func_open_nfc, func_close_nfc
// },
// {
// EVENT_FLAG_UNKOWN, "unknow",
// EVENT_FLAG_STATUS_STOP,
// "0000" , "EVENT_FLAG_UNKOWN"
// }
// };
typedef struct
{
char key[EVENT_KEY_VALUE_MAX]; // key[0,3] addr key[4,7] value
char event_name[EVENT_FLAG_NAME_MAX];
void (*func)();
}dwin_event_key_spec;
void func_search();
void func_spec_end();
void searc_spec_event();
#define EVENT_KEY_SPEC_VALUE "over"
#define EVENT_KEY_SPEC_NUM_MAX 20
dwin_event_key_spec event_key_spec[EVENT_KEY_SPEC_NUM_MAX];
// {
// // special event, just one ops
// // {
// // event_key, event_name,
// // event_ops
// // },
// {
// "1502010012", "search",
// func_search
// },
// // ...
// {EVENT_KEY_SPEC_VALUE, "end",
// func_spec_end
// }
// };
void change_dwin_status_key(dwin_event_key *in_key);
void change_cmd_send_status(dwin_event_flag temp_event_flag);
// -------------------- basic func --------------------
void copy_u8_2_u8(uint8_t * u8_raw);
void u8_to_char(uint8_t * in_u8, char ** out);
uint8_t * u8_to_u8(uint8_t * in_u8);
// -------------------- dwin func --------------------
void dwin_cmd_init_send();
void init_dwin_status();
void i_dwin_cmd_clear(i_dwin_cmd * cmd);
// get u8 from example
void uart_dwin_cmd_analysis(uint8_t *str);
void copy_u8_to_cmdu8(i_dwin_cmd *cmd, uint8_t * u8);
//int my_strlen(uint8_t *str);
// int search_str_end(uint8_t *str_z, int count);
// int my_strlen(uint8_t *str);
// int judge_char(uint8_t * str);
#define DWIN_CMD_CHAR_ADDR_VALUE 8
#define DWIN_CMD_CHAR_VALUE_VALUE 12
#define DWIN_CMD_CHAR_MAX 513
#define DWIN_CMD_U8_MAX 256
// add for char
#define C_CMD_POINT_HEAD 0
#define C_CMD_POINT_LEN 4
#define C_CMD_POINT_WR 6
#define C_CMD_POINT_ADDR 8
#define C_CMD_POINT_VALUE 12
typedef struct
{
char head[5];
char len[3];
char wr[3];
char addr[5];
char * value;
char * cmd_char;
}c_dwin_cmd;
int judge_dwin_cmd(uint8_t ** in_u8_raw);
int get_len(uint8_t *cmd_u8);
void c_dwin_cmd_analysis(char * in,c_dwin_cmd *cmd);
void c_dwin_cmd_clear(c_dwin_cmd * cmd);
dwin_event_flag c_judge_dwin_event(c_dwin_cmd * cmd);
void c_print_cmd(c_dwin_cmd *cmd);
void print_uint8(uint8_t * in);
#CC = aarch64-poky-linux-gcc -mcpu=cortex-a55 -fstack-protector-strong -D_FORTIFY_SOURCE=2 -Wformat -Wformat-security -Werror=format-security --sysroot=/opt/poky/3.1.5/sysroots/aarch64-poky-linux
TARGET=t2_uart
OBJS=t2_uart.o
CFLAGS+=-c -Wall -g
LDFLAGS+= -lpthread
OPENSSL_DIR = /home/share/forlinx/OKT507/pro/feiling_dwin/v3_event
INC_DIR = dwin.h
SRC_DIR = dwin.c
DWIN = dwin
# $(TARGET):$(OBJS)
# $(CC) $^ $(LDFLAGS) -o $@
# %.o:%.c
# $(CC) $^ $(CFLAGS) -o $@
dwin_test:uart_example.c $(SRC_DIR) $(INC_DIR)
$(CC) $^ -o dwin_test
# dwin.o:
# $(CC) $^ -o dwin.o
# $CC t2_uart.c -o t2_uart
clean:
$(RM) *.o $(TARGET) -r
install:
install -m 0755 $(TARGET) ./
配置环境
【命令】export CC=aarch64-linux-gnu-gcc
编译
在对应目录直接输入make,会调用Makefile进行编译,最终生成dwin_test文件
【命令】make

传输
通过sftp将文件传输给设备OKT507
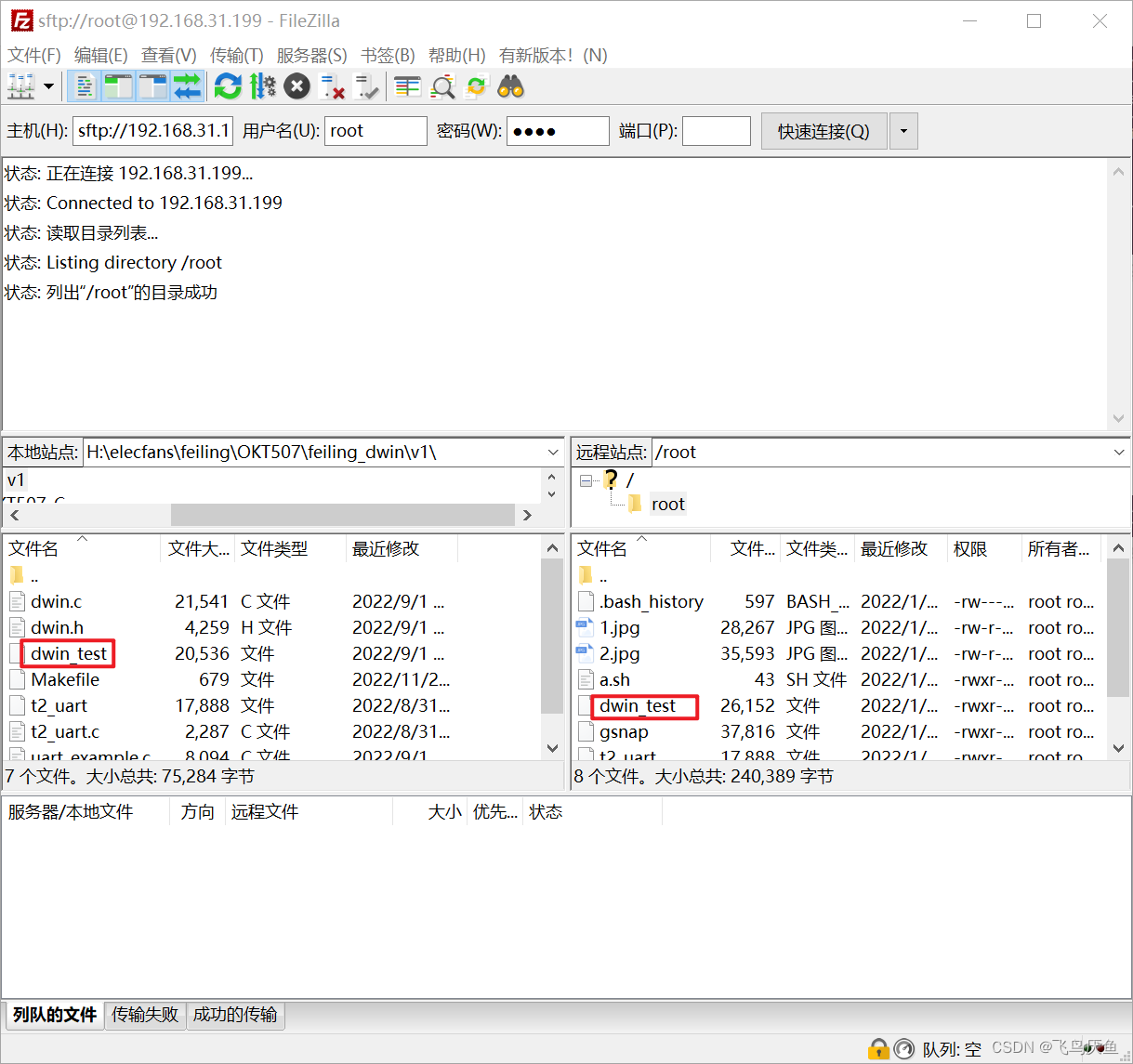
直接拖到右侧的远程站点即可。
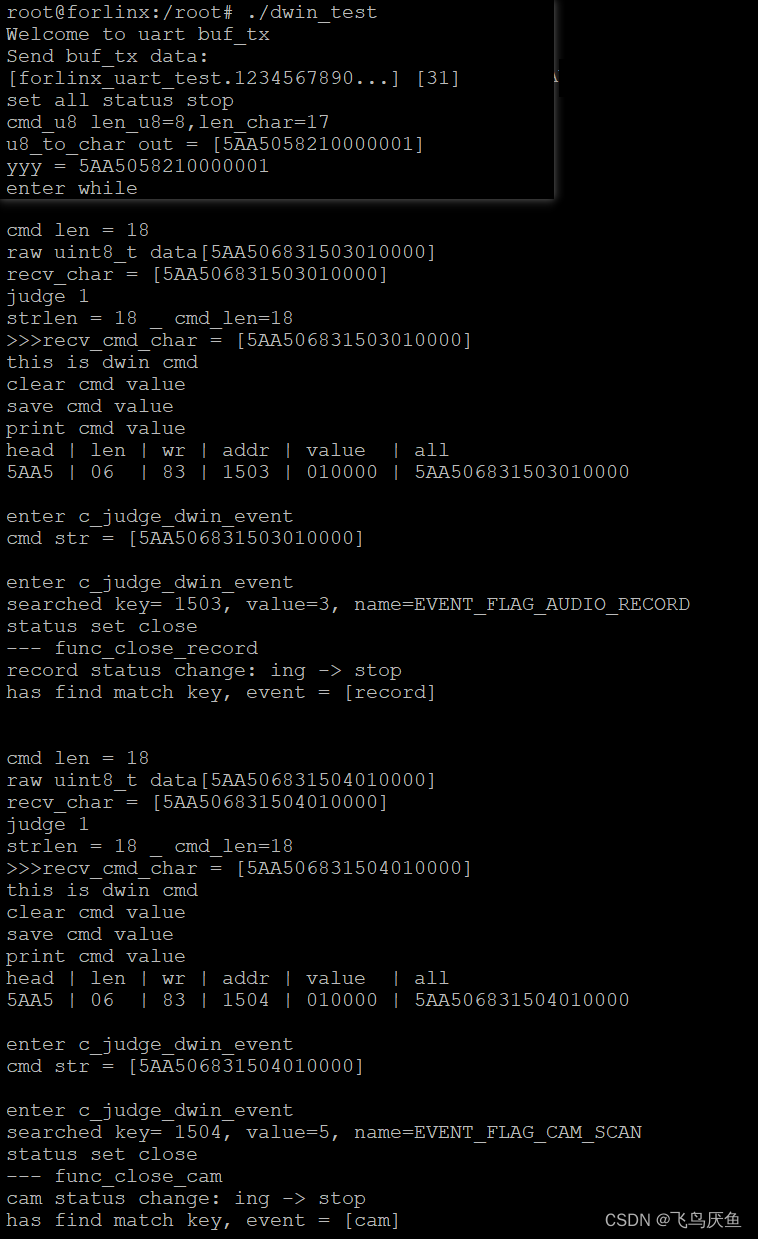
运行















 176
176











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









