









摘要:实数网络在图像领域取得极大成功,但在音频中,信号特征大多数是复数,如频谱等。简单分离实部虚部,或者考虑幅度和相位角都丢失了复数原本的关系。论文按照复数计算的定义,设计了深度复数网络,能对复数的输入数据进行卷积、激活、批规范化等操作。在音频信号的处理中,该网络应该有极大的优势。这里对论文提出的几种复数操作进行介绍,并给出简单的pytorch实现方法。
虽然叫深度复数网络,但里面的操作实际上还是在实数空间进行的。但通过实数的层实现类似于复数计算的操作。
目录
- 关于复数卷积操作
- 关于复数激活函数
- 关于复数Dropout
- 关于复数权重初始化
- 关于复数BatchNormalization
- 完整模型搭建
主要参考文献
【1】“DEEP COMPLEX NETWORKS”
【2】论文作者给出的源码地址,使用Theano后端的Keras实现:“https://github.com/ChihebTrabelsi/deep_complex_networks”
【3】“https://github.com/wavefrontshaping/complexPyTorch” 给出了部分操作的Pytorch实现版本。
1. 关于复数卷积操作
复数卷积通过如下形式定义:
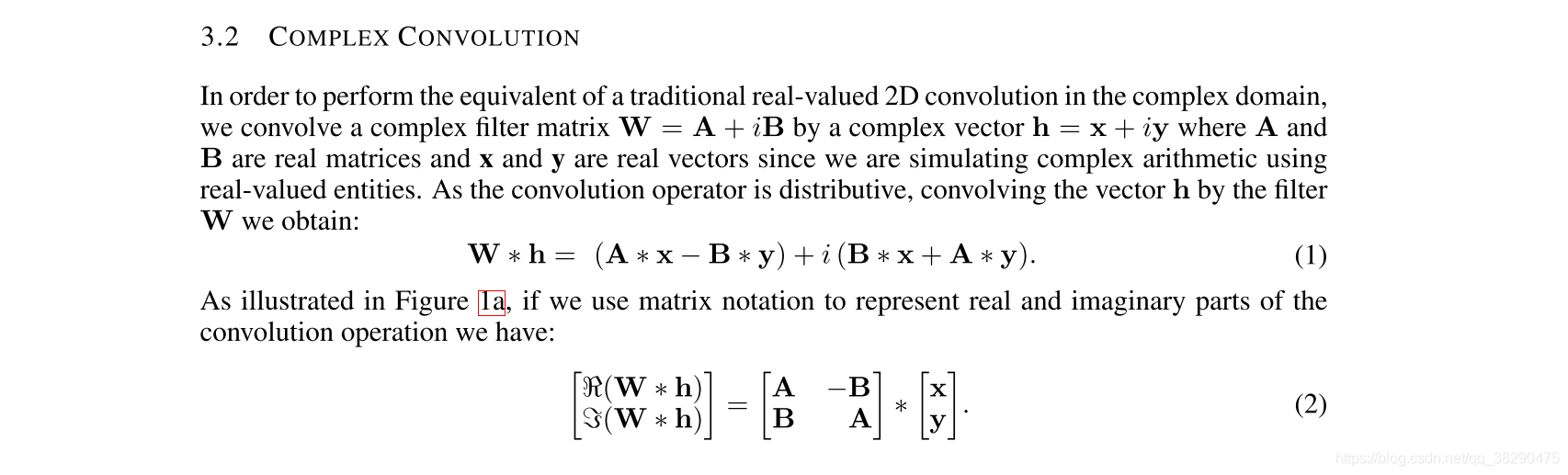
在具体实现中,可以使用下图所示的简单结构实现。

因此,利用pytorch的nn.Conv2D实现,严格遵守上面复数卷积的定义式:
class ComplexConv2d(Module):
def __init__(self, input_channels, output_channels,
kernel_sizes=3, stride=1, padding=0, dilation=0, groups=1, bias=True):
super(ComplexConv2d, self).__init__()
self.conv_real = Conv2d(input_channels, output_channels, kernel_size, stride, padding, dilation, groups, bias)
self.conv_imag = Conv2d(input_channels, output_channels, kernel_size, stride, padding, dilation, groups, bias)
def forward(self, input_real, input_imag):
assert input_real.shape == input_imag.shape
return self.conv_real(input_real) - self.conv_imag(input_imag), self.conv_imag(input_real) + self.conv_real(input_imag)
2. 关于复数激活函数
论文作者提出了一种复数激活函数——CReLU,同时又介绍了另外两种复数激活函数——modReLU和zReLU。



复数激活函数需要满足Cauchy-Riemann Equations才能进行复数微分操作,其中
- modReLU不满足;
- zReLU在实部为0,虚部大于0或者虚部为0,实部大于0的时候不满足,即在x和y的正半轴不满足;
- CReLU只在实部虚部同时大于零或同时小于零的时候满足,即在第2、4象限不满足;
以作者提出的CReLU的实现为例:
from torch.nn.functional import relu
def complex_relu(input_real, input_imag):
return relu(input_real), relu(input_imag)
3. 关于复数Dropout
复数Dropout个人感觉实部虚部需要同时置0,作者源码中没用到Dropout层。
所以【3】中的Dropout好像不太对。实现起来和普通的一样,共享两个Dropout层的参数即可。
4. 关于复数权重初始化
作者介绍了两种初始化方法的复数形式:Glorot、He初始化。
如原文介绍的,初始化时需要对幅度和相位分别初始化。

利用Pytorch实现,直接在源码上进行修改,_calculate_correct_fan()源码中有。
def complex_kaiming_normal_(tensor_real, tensor_imag, a=0, mode='fan_in'):
fan = _calculate_correct_fan(tensor_real, mode)
s = 1. / fan
rng = RandomState()
modulus = rng.rayleigh(scale=s, size=tensor.shape)
phase = rng.uniform(low=-np.pi, high=np.pi, size=tensor.shape)
weight_real = modulus * np.cos(phase)
weight_imag = modulus * np.sin(phase)
weight = np.concatenate([weight_real, weight_imag], axis=-1)
with torch.no_grad():
return torch.tensor(weight)
上述计算过程参考【1】和【2】,但这种两个张量的初始化不知道怎么直接使用init这样的形式,只能配合如下手动初始化方法食用。
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
# 第一一个卷积层,我们可以看到它的权值是随机初始化的
w=torch.nn.Conv2d(2,2,3,padding=1)
print(w.weight)
# 第一种方法
print("1.使用另一个Conv层的权值")
q=torch.nn.Conv2d(2,2,3,padding=1) # 假设q代表一个训练好的卷积层
print(q.weight) # 可以看到q的权重和w是不同的
w.weight=q.weight # 把一个Conv层的权重赋值给另一个Conv层
print(w.weight)
# 第二种方法
print("2.使用来自Tensor的权值")
ones=torch.Tensor(np.ones([2,2,3,3])) # 先创建一个自定义权值的Tensor,这里为了方便将所有权值设为1
w.weight=torch.nn.Parameter(ones) # 把Tensor的值作为权值赋值给Conv层,这里需要先转为torch.nn.Parameter类型,否则将报错
print(w.weight)
5. 关于复数BatchNormalization
首先肯定不能用常规的BN方法,否则实部和虚部的分布就不能保证了。但正如常规BN方法,首先要对输入进行0均值1方差的操作,只是方法有所不同。
通过下面的操作,可以确保输出的均值为0,协方差为1,相关为0。


同时BN中还有
β
\beta
β和
γ
\gamma
γ两个参数。因此最终的BN结果如下。

核心的计算步骤及代码实现见下一节完整实现过程,参考【3】。
6. 完整模型搭建
使用复数卷积、BN、激活函数搭建一个简单的完整模型。
使用mnist数据集,用文中提到的方法生成虚部。
实际使用中音频、光学信号可以直接有复数谱作为输入。
import matplotlib.pyplot as plt
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.nn import Module, Parameter, init
from torch.nn import Conv2d, Linear, BatchNorm2d
from torch.nn.functional import relu
from torchvision import datasets, transforms
def complex_relu(input_r, input_i):
return relu(input_r), relu(input_i)
class ComplexConv2d(Module):
def __init__(self,in_channels, out_channels, kernel_size=3, stride=1, padding = 0,
dilation=1, groups=1, bias=True):
super(ComplexConv2d, self).__init__()
self.conv_r = Conv2d(in_channels, out_channels, kernel_size, stride, padding, dilation, groups, bias)
self.conv_i = Conv2d(in_channels, out_channels, kernel_size, stride, padding, dilation, groups, bias)
def forward(self,input_r, input_i):
assert(input_r.size() == input_i.size())
return self.conv_r(input_r)-self.conv_i(input_i), self.conv_r(input_i)+self.conv_i(input_r)
class ComplexLinear(Module):
def __init__(self, in_features, out_features):
super(ComplexLinear, self).__init__()
self.fc_r = Linear(in_features, out_features)
self.fc_i = Linear(in_features, out_features)
def forward(self,input_r, input_i):
return self.fc_r(input_r)-self.fc_i(input_i), self.fc_r(input_i)+self.fc_i(input_r)
class _ComplexBatchNorm(Module):
def __init__(self, num_features, eps=1e-5, momentum=0.1, affine=True,
track_running_stats=True):
super(_ComplexBatchNorm, self).__init__()
self.num_features = num_features
self.eps = eps
self.momentum = momentum
self.affine = affine
self.track_running_stats = track_running_stats
if self.affine:
self.weight = Parameter(torch.Tensor(num_features,3))
self.bias = Parameter(torch.Tensor(num_features,2))
else:
self.register_parameter('weight', None)
self.register_parameter('bias', None)
if self.track_running_stats:
self.register_buffer('running_mean', torch.zeros(num_features,2))
self.register_buffer('running_covar', torch.zeros(num_features,3))
self.running_covar[:,0] = 1.4142135623730951
self.running_covar[:,1] = 1.4142135623730951
self.register_buffer('num_batches_tracked', torch.tensor(0, dtype=torch.long))
else:
self.register_parameter('running_mean', None)
self.register_parameter('running_covar', None)
self.register_parameter('num_batches_tracked', None)
self.reset_parameters()
def reset_running_stats(self):
if self.track_running_stats:
self.running_mean.zero_()
self.running_covar.zero_()
self.running_covar[:,0] = 1.4142135623730951
self.running_covar[:,1] = 1.4142135623730951
self.num_batches_tracked.zero_()
def reset_parameters(self):
self.reset_running_stats()
if self.affine:
init.constant_(self.weight[:,:2],1.4142135623730951)
init.zeros_(self.weight[:,2])
init.zeros_(self.bias)
class ComplexBatchNorm2d(_ComplexBatchNorm):
def forward(self, input_r, input_i):
assert(input_r.size() == input_i.size())
assert(len(input_r.shape) == 4)
exponential_average_factor = 0.0
if self.training and self.track_running_stats:
if self.num_batches_tracked is not None:
self.num_batches_tracked += 1
if self.momentum is None: # use cumulative moving average
exponential_average_factor = 1.0 / float(self.num_batches_tracked)
else: # use exponential moving average
exponential_average_factor = self.momentum
if self.training:
# calculate mean of real and imaginary part
mean_r = input_r.mean([0, 2, 3])
mean_i = input_i.mean([0, 2, 3])
mean = torch.stack((mean_r,mean_i),dim=1)
# update running mean
with torch.no_grad():
self.running_mean = exponential_average_factor * mean\
+ (1 - exponential_average_factor) * self.running_mean
input_r = input_r-mean_r[None, :, None, None]
input_i = input_i-mean_i[None, :, None, None]
# Elements of the covariance matrix (biased for train)
n = input_r.numel() / input_r.size(1)
Crr = 1./n*input_r.pow(2).sum(dim=[0,2,3])+self.eps
Cii = 1./n*input_i.pow(2).sum(dim=[0,2,3])+self.eps
Cri = (input_r.mul(input_i)).mean(dim=[0,2,3])
with torch.no_grad():
self.running_covar[:,0] = exponential_average_factor * Crr * n / (n - 1)\
+ (1 - exponential_average_factor) * self.running_covar[:,0]
self.running_covar[:,1] = exponential_average_factor * Cii * n / (n - 1)\
+ (1 - exponential_average_factor) * self.running_covar[:,1]
self.running_covar[:,2] = exponential_average_factor * Cri * n / (n - 1)\
+ (1 - exponential_average_factor) * self.running_covar[:,2]
else:
mean = self.running_mean
Crr = self.running_covar[:,0]+self.eps
Cii = self.running_covar[:,1]+self.eps
Cri = self.running_covar[:,2]#+self.eps
input_r = input_r-mean[None,:,0,None,None]
input_i = input_i-mean[None,:,1,None,None]
# calculate the inverse square root the covariance matrix
det = Crr*Cii-Cri.pow(2)
s = torch.sqrt(det)
t = torch.sqrt(Cii+Crr + 2 * s)
inverse_st = 1.0 / (s * t)
Rrr = (Cii + s) * inverse_st
Rii = (Crr + s) * inverse_st
Rri = -Cri * inverse_st
input_r, input_i = Rrr[None,:,None,None]*input_r+Rri[None,:,None,None]*input_i, \
Rii[None,:,None,None]*input_i+Rri[None,:,None,None]*input_r
if self.affine:
input_r, input_i = self.weight[None,:,0,None,None]*input_r+self.weight[None,:,2,None,None]*input_i+\
self.bias[None,:,0,None,None], \
self.weight[None,:,2,None,None]*input_r+self.weight[None,:,1,None,None]*input_i+\
self.bias[None,:,1,None,None]
return input_r, input_i
class ComplexNet(nn.Module):
def __init__(self):
super(ComplexNet, self).__init__()
self.conv1 = ComplexConv2d(1, 20, 5, 2)
self.bn = ComplexBatchNorm2d(20)
self.conv2 = ComplexConv2d(20, 50, 5, 2)
self.fc1 = ComplexLinear(4*4*50, 500)
self.fc2 = ComplexLinear(500, 10)
self.bn4imag = BatchNorm2d(1)
self.conv4imag = Conv2d(1, 1, 3, 1, padding=1)
def forward(self,x):
xr = x
# imaginary part BN-ReLU-Conv-BN-ReLU-Conv as shown in paper
xi = self.bn4imag(xr)
xi = relu(xi)
xi = self.conv4imag(xi)
# flow into complex net
xr,xi = self.conv1(xr,xi)
xr,xi = complex_relu(xr,xi)
xr,xi = self.bn(xr,xi)
xr,xi = self.conv2(xr,xi)
xr,xi = complex_relu(xr,xi)
# print(xr.shape)
xr = xr.reshape(-1, 4*4*50)
xi = xi.reshape(-1, 4*4*50)
xr,xi = self.fc1(xr,xi)
xr,xi = complex_relu(xr,xi)
xr,xi = self.fc2(xr,xi)
# take the absolute value as output
x = torch.sqrt(torch.pow(xr,2)+torch.pow(xi,2))
return F.log_softmax(x, dim=1)
batch_size = 64
trans = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (1.0,))])
train_set = datasets.MNIST('../data', train=True, transform=trans, download=True)
test_set = datasets.MNIST('../data', train=False, transform=trans, download=True)
train_loader = torch.utils.data.DataLoader(train_set, batch_size= batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(test_set, batch_size= batch_size, shuffle=True)
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = ComplexNet().to(device)
print(model)
optimizer = torch.optim.SGD(model.parameters(), lr=0.01, momentum=0.9)
# train steps
train_loss = []
for epoch in range(50):
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output, target)
loss.backward()
optimizer.step()
train_loss.append(loss.item())
if batch_idx % 100 == 0:
print('Train Epoch: {:3} [{:6}/{:6} ({:3.0f}%)]\tLoss: {:.6f}'.format(
epoch,
batch_idx * len(data),
len(train_loader.dataset),
100. * batch_idx / len(train_loader),
loss.item())
)
plt.plot(train_loss)

















 2140
2140

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









