






我一直有这样的疑问为什么有限状态机,状态空间方程,传递函数都能写成S-function模块,答案先放在这:
本质上,他们都是状态机
状态空间(state-space)方程
状态空间方程是现代控制理论的概念,其离散形式简单表示为:
{
x
k
+
1
=
A
x
+
B
u
y
=
C
x
(
+
D
u
)
\left\{\begin{matrix} x_{k+1}=Ax+Bu\\y=Cx(+Du)\end{matrix}\right.
{xk+1=Ax+Buy=Cx(+Du)
其中
x
x
x表示当拍状态,
x
k
+
1
x_{k+1}
xk+1为下一拍状态,
u
u
u为输入,
y
y
y为输出。
有限状态机(FSM)
状态机是描述一个过程的手段,一般在编程中使用有限状态机(FSM)。FPGA中状态机(四段式)的实现如下图:
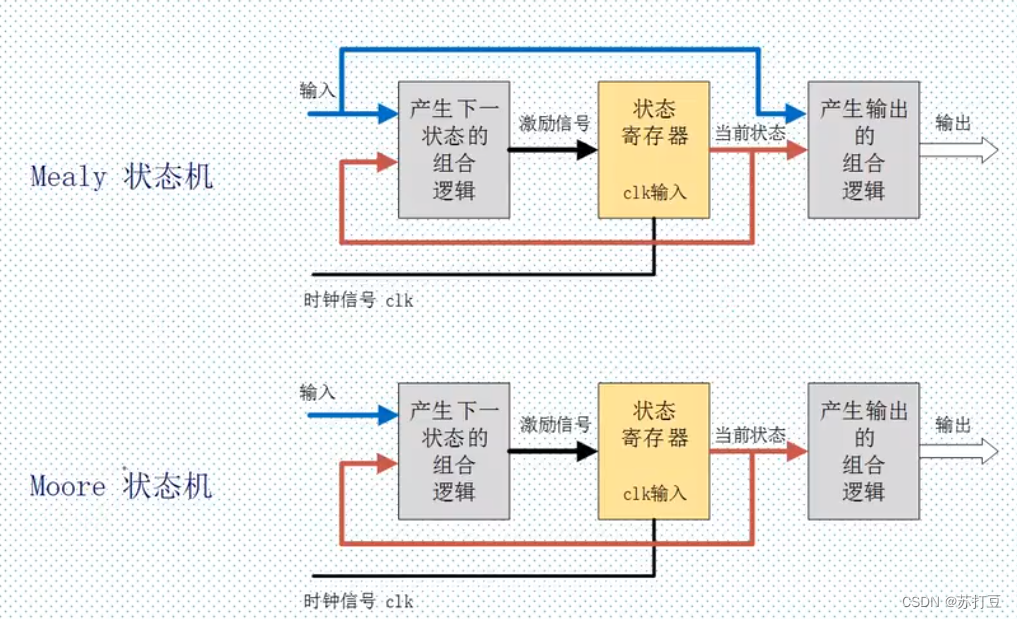
Mealy机与Moore机的区别在于是否有feedthrough。
二者关系
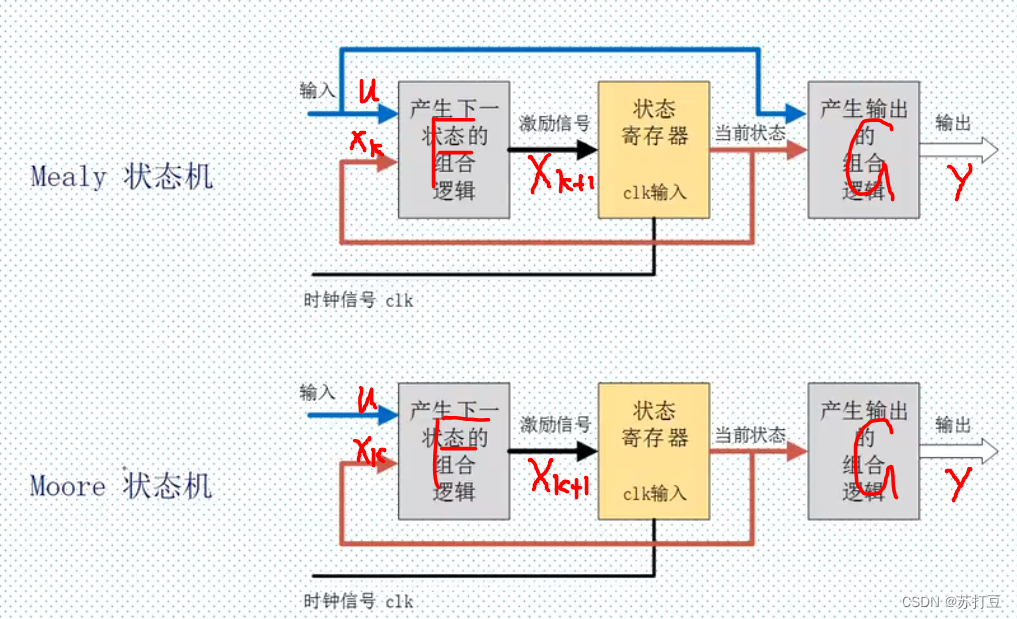
Mealy机表示为:
{
x
k
+
1
=
F
(
x
,
u
)
y
=
G
(
x
,
u
)
\left\{\begin{matrix} x_{k+1}=\mathcal{F}(x,u) \\y=\mathcal{G}(x,u)\end{matrix}\right.
{xk+1=F(x,u)y=G(x,u)
Moore机表示为:
{
x
k
+
1
=
F
(
x
,
u
)
y
=
G
(
x
)
\left\{\begin{matrix} x_{k+1}=\mathcal{F}(x,u) \\y=\mathcal{G}(x)\end{matrix}\right.
{xk+1=F(x,u)y=G(x)
与状态空间方程完美对应:
- 状态空间方程是一种线性化的多状态的无限状态机
- FSM是一种单状态的有限状态机
也就是说这两者本质上都是状态机,他们都是在描述一个事物的发展过程,都是对现实事物发展的一种抽象。真的很神奇!
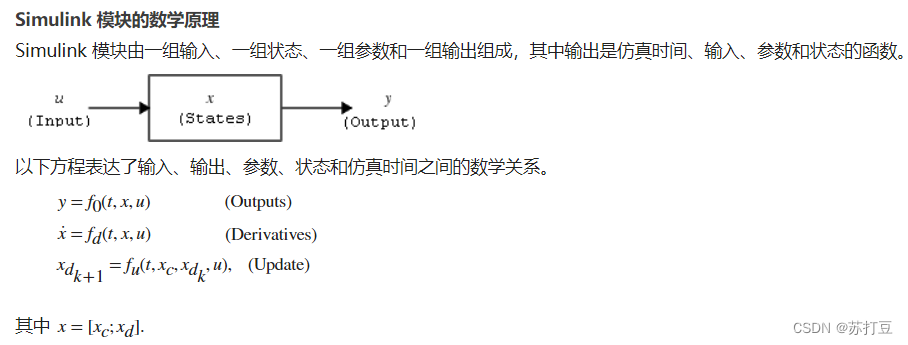
Simulink S-Function
Simulink仿真其实就是在模拟事物发展的过程,其实每个模块都是一个状态机。
里面的状态分为了离散状态和连续状态。
- 有限状态机状态:单个有限离散状态
- 离散状态空间方程状态:一组无限离散状态
- 连续状态空间方程状态:一组无限连续状态
- 离散传递函数:单个无限离散状态,并且隐藏了状态
- 连续传递函数:单个无限连续状态,并且隐藏了状态
离散状态与连续状态的区别是: - F ( x c , u ) \mathcal{F}(x_c,u) F(xc,u) 对应Update函数(更新)。
-
F
(
x
d
,
u
)
\mathcal{F}(x_d,u)
F(xd,u) 对应Derivatives函数(微分,需要龙格库塔解微分方程)。
而 G ( x , u ) \mathcal{G}(x,u) G(x,u)都对应Output函数,Output中如果有 u u u,则为Mealy机,没有则为Moor机。















 580
580











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











