







牛马的三年
一、摘要
提出了一个新颖的多机器人协作方法,该方法利用LLM进行通信和路径规划。机器人配备LLM进行讨论和推理任务策略,并生成子任务规划和任务空间路径点,并利用多臂规划器加速轨迹规划。同时,提示LLM智能体改进规划和路径点。
二、准备工作
2.1 任务假设
个机器人的协作任务环境。有限的时间为
,全观察空间为
。每个机器人的索引值为
,其具有观察空间
。智能体可能具有不对成的观察空间和观察能力,这强调了通信的必要性。
手动定义了描述函数,用于将任务语义和时间步长
处的观察结构转换为自然语言提示:
。
本文也定义了将LLM输出映射到相应子任务的解析函数中,该子任务可以由一个或多个抓取目标配置进行描述。
2.2 多臂路径规划
设表示所有
个机械臂的关节配置空间,
为配置空间的障碍区域,则无碰空间为
。给定初始条件
和目标区域
,多臂运动规划涉及寻找最优的
,并满足
。我们假设得到的
被用于机械臂的基于位置的关节控制器用于开环执行。
三、基于LLM的多机器人协作
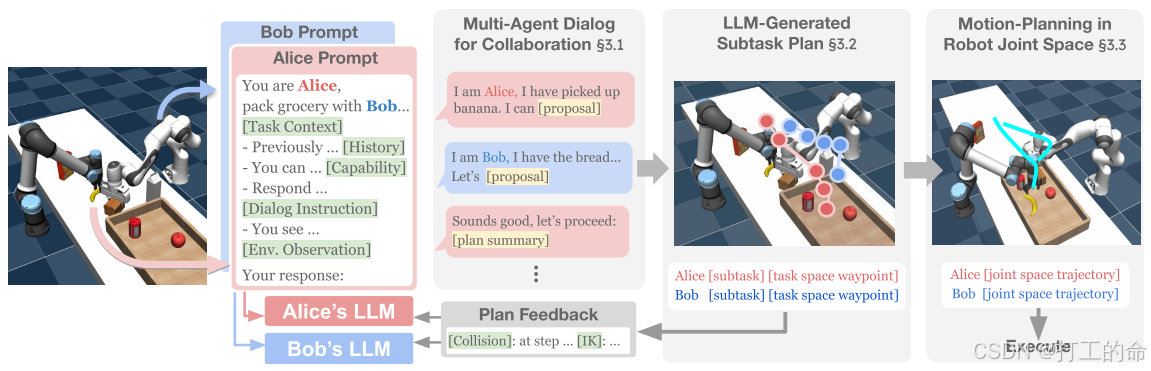
3.1 通过LLM的多智能体对话
我们假设多智能体任务环境具有不对称的观察空间和技能能力,这需要沟通才能进行有意义的协调。
在每次环境交互之前,我们设置一轮对话,其中每个机器人都被委托给一个 LLM 代理,该代理接收特定于代理的信息并严格根据其角色进行响应。
我们假设多智能体任务环境具有不对称的观察空间和技能能力,这需要沟通才能进行有意义的协调。在每次调用PromptDialogs期间,每个代理在到达动作规划之前至少说一次;每次调用GiveFeedback之后,提出的规划通过一组验证检查,并可选地产生文本反馈,用于下一轮。最终的规划由MotionPlanner生成机器人运动轨迹。
3.2 LLM生成的子任务规划
一旦一轮对话结束,最后一个发言的Agent就会总结一个“子任务计划”,其中每个智能体都会获得一个子任务,并且可以选择任务空间中的3D路径点。
- 文本分析,确保规划遵守所需的格式,并包含所有需要的关键字
- 任务约束,检查每个动作是否符合任务和智能体约束
- 逆运动学,通过逆运动学检查每个机械臂的目标姿态是否可行
- 碰撞检查,检查通过IK求解的机械臂连接配置是否导致碰撞
- 有效的路径点,如果任务需要路径规划,则每个中间路线点必须是IK可解并且五重午,并且所有步骤应均匀分布
3.3 基于LLM的关节空间运动规划
一旦子任务通过所有验证,本文就使用IK在所有机械臂上联合生成目标配置,每一步都会生成中间配置
目标配置被传递到基于RRT的多臂运动规划器中,该规划器输出每个机器人的运动轨迹,并在环境中执行。
4. RoCoBench: 多机器人协作验证平台
RoCoBtch是一套由6个多机器人协作任务组成的桌面操作环境。这些任务涉及LLM容易理解的常见家用对象,并跨越需要不同机器人通信和协调行为的一系列协作场景。
- 任务分解:任务是否可以分解成可以并行完成或按一定顺序完成的子部分。RoCoBitch中的三个任务具有顺序性质(例如,制作三明治要求食品按正确的顺序堆放),而其他三个任务可以并行执行(例如,包装杂货店中的物品可以按任何顺序放入垃圾箱)。
- 观测空间:每个机器人代理接收多少任务和环境信息。 三个任务提供对任务工作空间的共享观察,而其他三个任务则具有更不对称的设置,机器人必须互相询问以交换知识。
- 工作空间重叠:操作机器人之间的接近度; 我们将每个任务从低、中、高进行排名,其中较高的重叠要求更仔细的低级协调(例如,移动绳索需要一起操纵同一对象)。

















 1519
1519

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









