







 本文详细介绍了生成式对抗网络(GANs)的基础知识,包括生成模型与判别模型的区别、生成模型的似然原理,以及GAN的工作原理。通过讨论判别器和生成器的损失函数,解释了GANs如何通过零和博弈进行训练。此外,还探讨了使用KL散度来度量生成分布与真实分布的相似性,以及GAN在图像生成领域的应用。文章最后提到了GAN的TensorFlow和Keras实现。
本文详细介绍了生成式对抗网络(GANs)的基础知识,包括生成模型与判别模型的区别、生成模型的似然原理,以及GAN的工作原理。通过讨论判别器和生成器的损失函数,解释了GANs如何通过零和博弈进行训练。此外,还探讨了使用KL散度来度量生成分布与真实分布的相似性,以及GAN在图像生成领域的应用。文章最后提到了GAN的TensorFlow和Keras实现。
1-生成模型
1-1 生成模型与判别模型
生成式对抗网络,顾名思义就是生成模型嘛!那什么是生成模型呢?与判别模型有什么区别呢?
先来理解一下判别模型。
学过机器学习的人都知道,入门级的算法逻辑回归,最后的预测,是通过sigmoid函数:
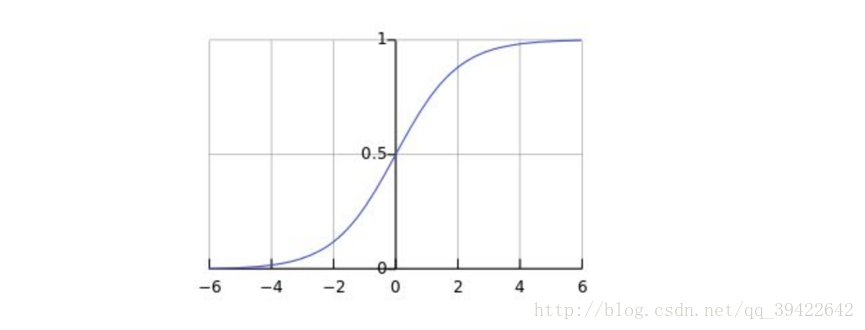
生成一个0-1之间的数值,然后用某一阀值来做分类,我们称之为判别模型:由数据直接学习,通过决策函数 Y=f(X) 或者概率模型 P(Y|X) 预测,判断类别的模型。逻辑回归中的sigmoid函数就是判别函数。
而生成模型,则先学习出一个联合概率密度分布 P(X,Y) ,最后分类,预测的时候,使用条件概率公式
生成模型的核心,就是先求两个比较好求的概率,然后通过贝叶斯概率公式这样的关系来进行分类。
简单的看,
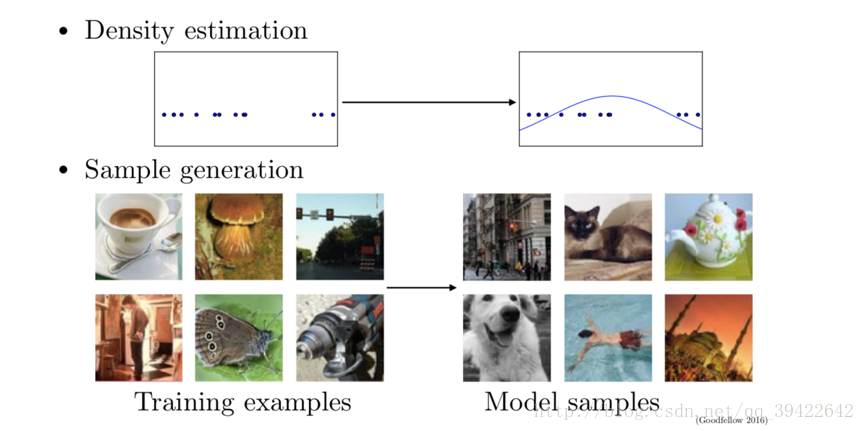
1-2 为什么学习生成模型?
我们可以总结一下它的优点:
- 能生成高维的数据或者复杂的概率分布,且高维数据分布在数学和工业界都扮演着重要的作用
- 还可以为强化学习做一定准备
- 对于缺失数据较多的场景,可以用来生成更多的样例数据,是当前用来解决信息缺失的最好方式。
举一些例子:
Next Video Frame Prediction
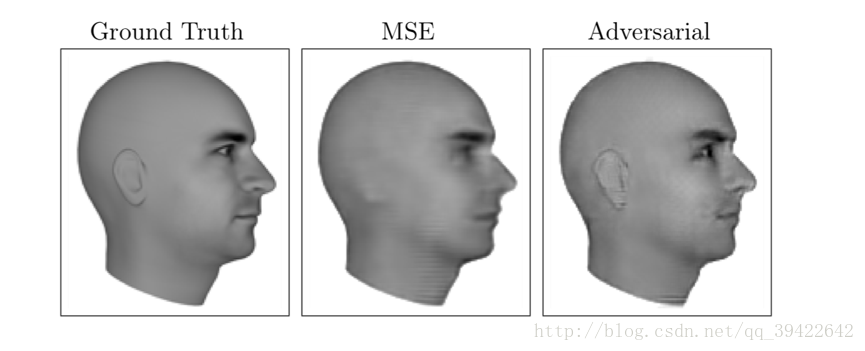
大概意思是预测下一帧会是什么?比如第一个头像是当前帧的状态,然后给出一个MSE(均方差矩阵),预测下一帧会出现什么,如图就是头转了大约15度或者30度左右的样子。
很明显,这个应用是很强大的,比如某些打码的片子,甚者打码的图片,三级片之类的,或者有损失的古物,古画,都有可能通过生成模型,来生成新的。
Single Image Super-Resolution
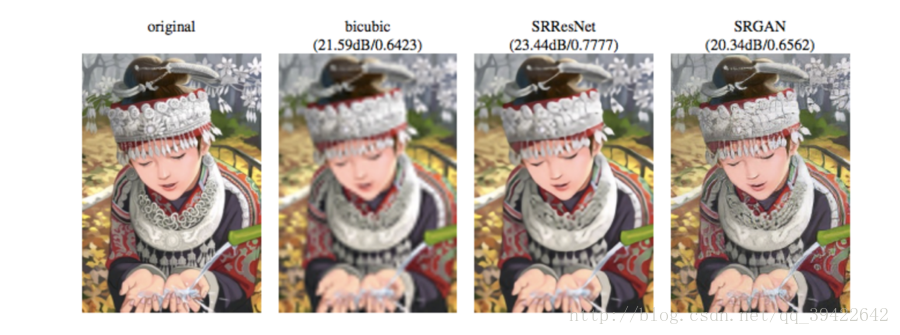
或者处理比较模糊的图片,因为像素太低,导致人看了不怎么清楚,可以通过GAN来生成更高像素的图片,看的更清晰。上图左为原始图片,第二张为 使用bicubic method的插值法得出的,第三张是使用ResNet,第四张是使用GAN来生成的。
Image to Image Translation

根据你画的样子,给你生成一个你可能想都没想过的样子,或者根据地图,生成场景之类的。
总之,GAN的特点之一,就是生成,生成一些你可能想都没想过的东西。
1-3 生成模型原理—似然原理
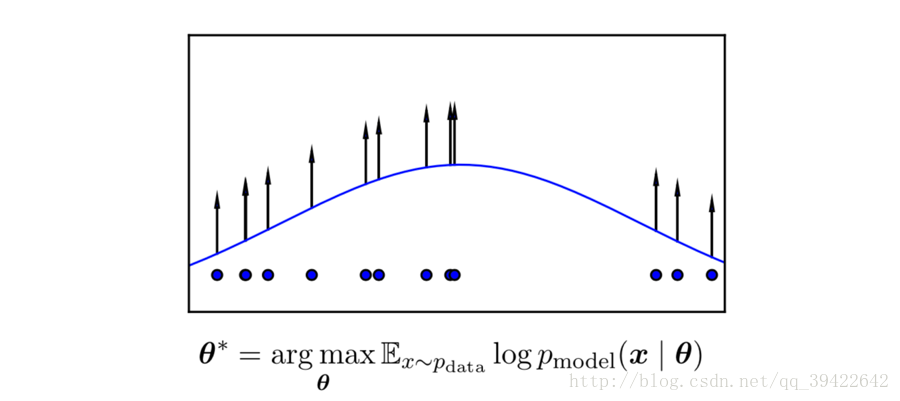
所谓的生成模型,其实就是基于最大似然估计的,而最大似然估计就是用的似然原理。
什么是似然原理呢?我们举个例子,比如你要估计一个学校的数学成绩是多少,肯定不会直接找全校的学生,然后再把他们的数学成绩放在一起计算吧。因为这样做的代价太大了,现实情况根本不允许。
那我们该怎么办呢?
那我们可以随机取样嘛,用样本来估计总体。什么意思呢?我们知道一个群体的某一形状假如服从正态分布,如图所示,那么这个分布的形状由两方面决定,分别是均值 μ 和方差 σ2 ,只要这两个定了,那么图像的概率密度分布也就定了。
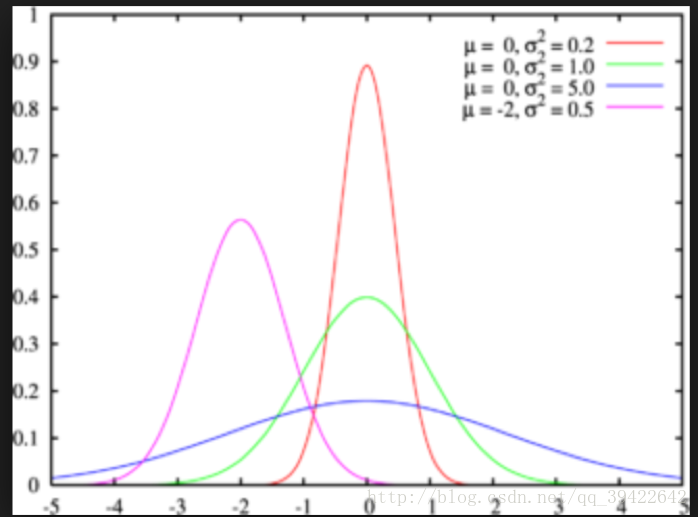
那我们能否用样本(抽到的学生)的均值和方差,估计总体(整个学校的学生)的均值和方差,这样不就得到了总体的概率分布了吗?其实这就是生成模型的原理。
想要详细了解它的公式推导,可以看一下这篇的最后一个部分:概率统计学习基础
2-生成式对抗网络
2-1 生成式对抗网络工作原理
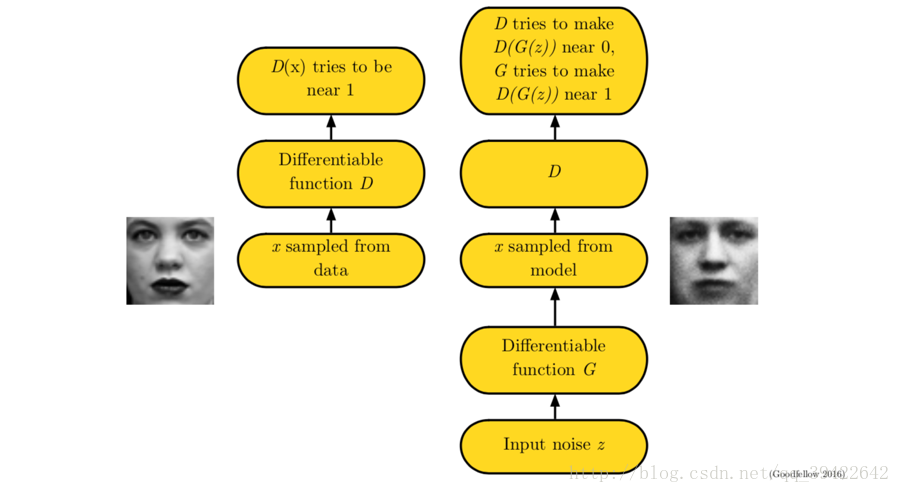
前面我们说的都是前期知识准备,了解生成模型,接下来看一下真正的生成式对抗网络,它的工作流如下:
GAN是一种structured probabilistic model,具体介绍在deep learning这本书的第16章有。
顾名思义,生成-对抗,其核心也是两个,一个是生成,用图中的 G(z) 表示,z是隐变量;一个是对抗,用图中的 D(x) 表示,x是观测变量。图结构表示如下:
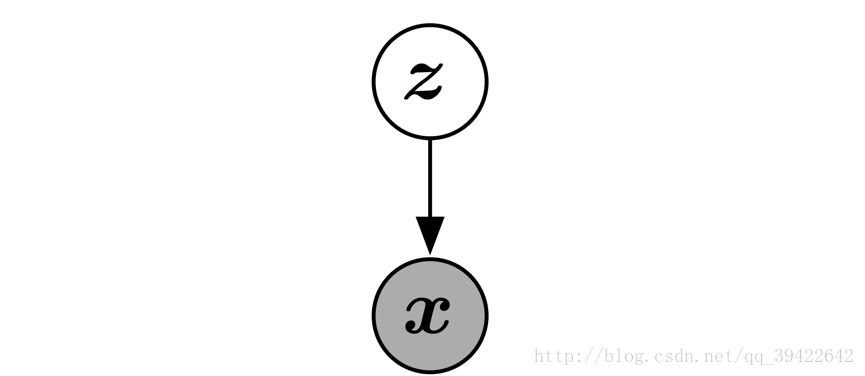
GAN是一个有向图模型,它的每一个隐变量都在影响观测变量。
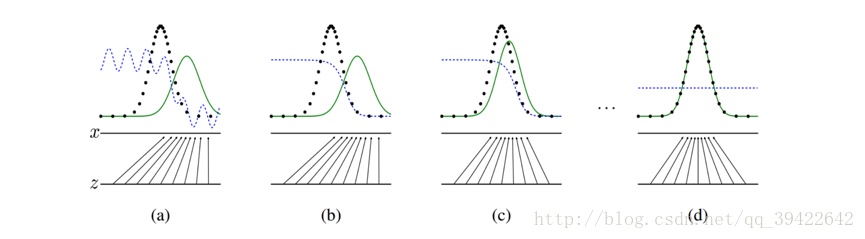
我们希望达到的效果,就如上图所示,生成式对抗网络会训练并更新判别分布(D,图中蓝色虚线部分),希望能将真实的分布( pdata(x),图中黑色虚线 )和生成分布( pmodel(G(z)),绿色实线 )区分开来。z表示属于某一分布的噪声数据,经过生成器之后,变成 x=G(z) ,得到一个生成分布 pmodel(G(z)) 。而上方的x水平线则代表真实的分布X中的一部分。
主要目标就两个:
- 判别器 D(x) 独自训练自己,希望能分辨出真实的数据分布和生成器给的数据分布
- 生成器 G(z) 也训练自己,希望以假乱真,让判别器判别不出到底哪个是真,哪个是假
G(z) , D(x) 它们的区别主要在于输入的数据和参数: θ(G),θ(D) .
我们输入noise样本给
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 9424
9424

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









