







点云(Point Cloud) 是一种重要的三维数据表示方法,由大量的三维坐标点构成,这些点共同描述了一个物体或场景的表面。每个点通常包含以下信息:
- 位置:点在三维空间中的坐标(x, y, z)。
- 属性(可选):可能包含颜色(RGB)、法向量、反射强度等其他信息。
- 反射强度(Reflectance Intensity) 是在点云数据中一个重要的属性,通常由激光扫描仪(如LiDAR)捕捉到。它代表了激光脉冲在遇到物体表面时返回的能量强度。反射强度提供了关于物体表面特性的有用信息,如材料、颜色和表面光洁度。
点云开山鼻祖论文
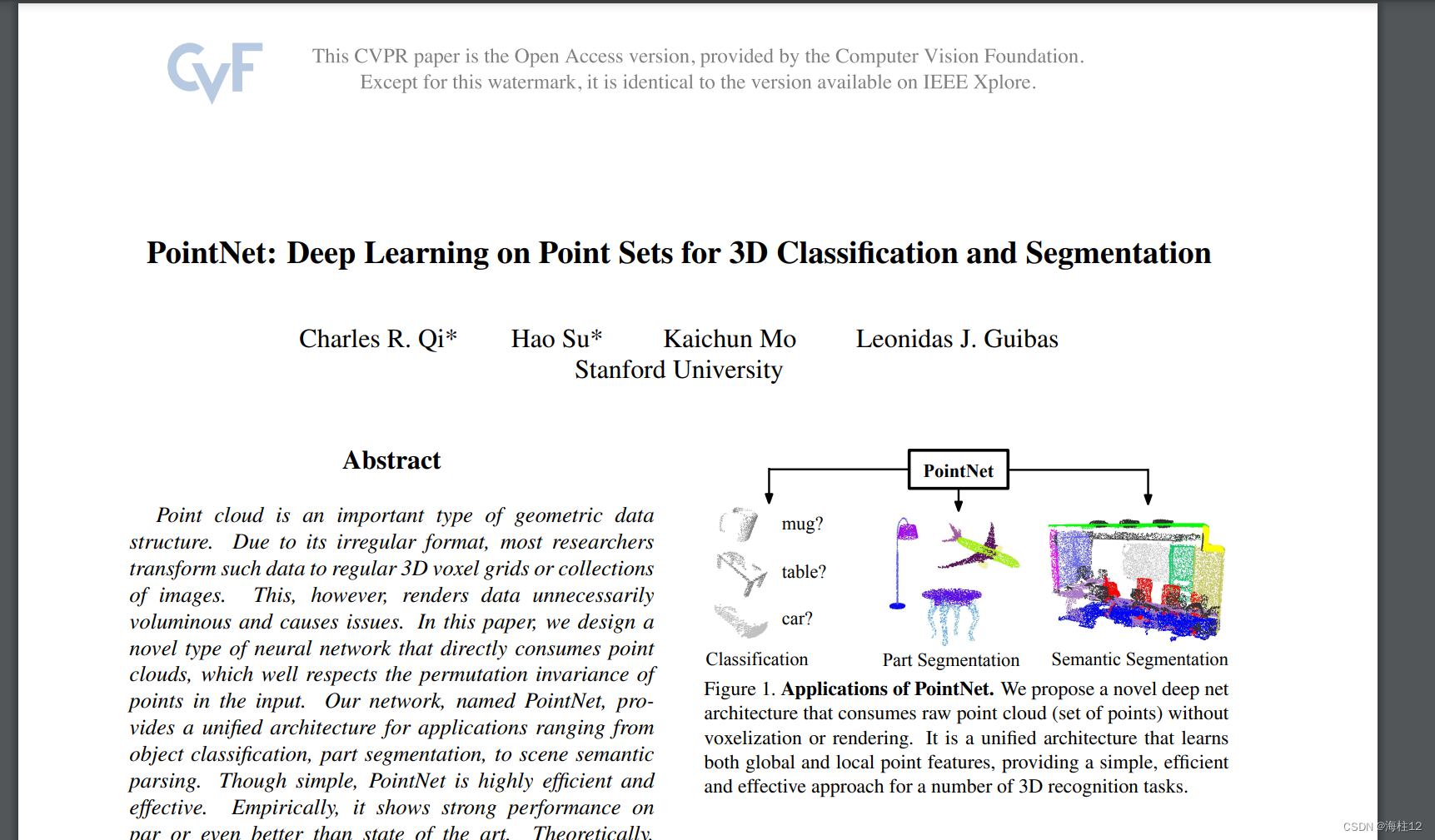
论文地址:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7951
7951

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











