







由上篇博客的分析控制系统中"带宽"的理解,我们知道,只要系统的截止频率足够高,就会有足够多频率的分量通过,输出就能很好的跟随输入。然而,不幸的是,有很多系统,其截止频率没有足够高,那怎么办呢?举个例子:
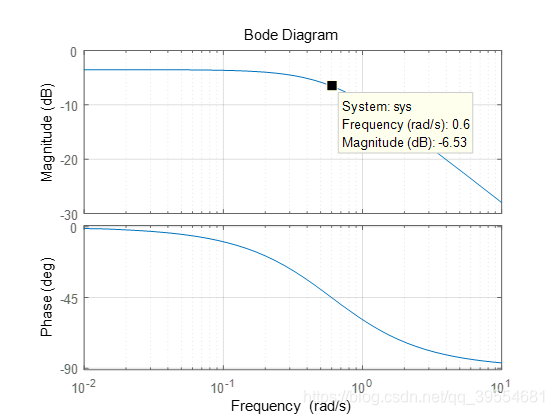
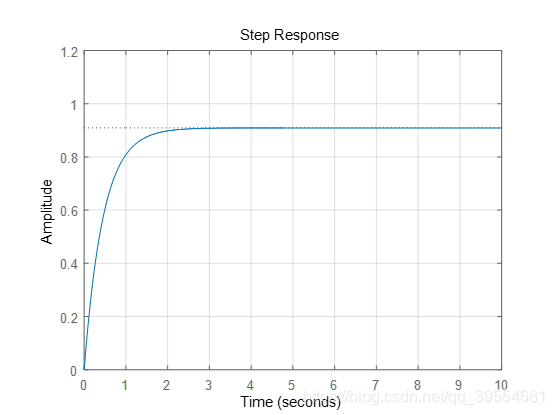
对于惯性系统 G ( s ) = 1 T s + 1 = 1 5 s + 1 , T = 5 G(s)=\frac{1}{Ts+1}=\frac{1}{5s+1},T=5 G(s)=Ts+11=5s+11,T=5,
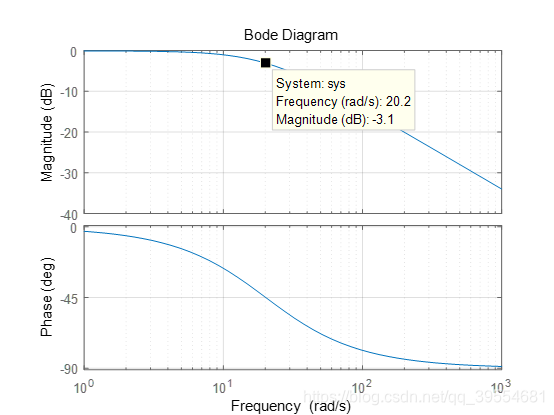
其阶跃响应和波德图如下:
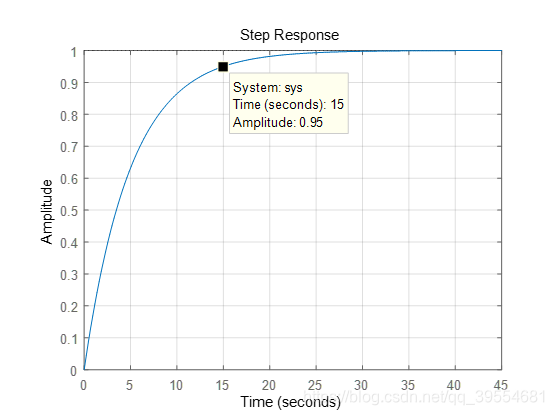
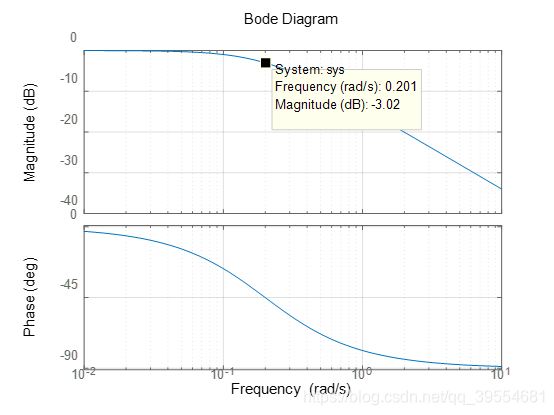
可以看到,其截止频率为 0.2 r a d / s 0.2rad/s 0.2rad/s,高于该频率信号的幅值响应会急剧减小;假如输入信号频率为 2 r a d / s 2rad/s 2rad/s,输出幅值将衰减到输入信号的十分之一,如果想得到 2 r a d / s 2rad/s 2rad/s的信号输出,又不想输出信号幅值衰减,怎么办呢?——这就引入了负反馈系统!
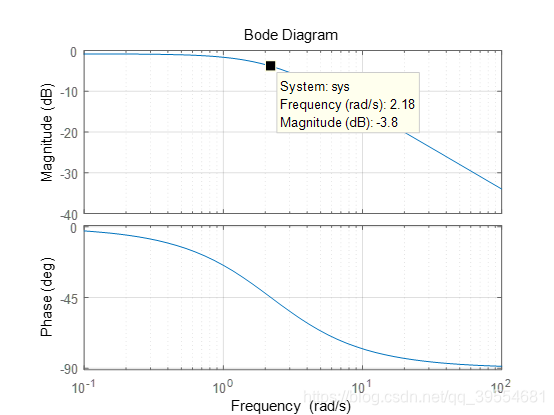
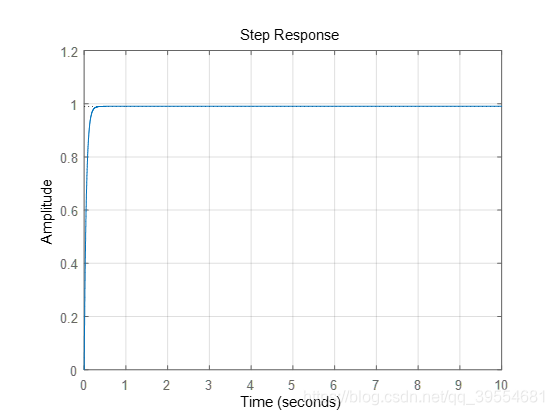
首先我们将上述系统进行一个简单的闭环,观察其阶跃响应曲线:
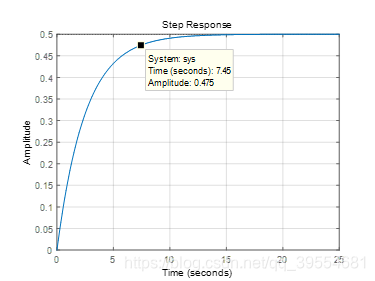
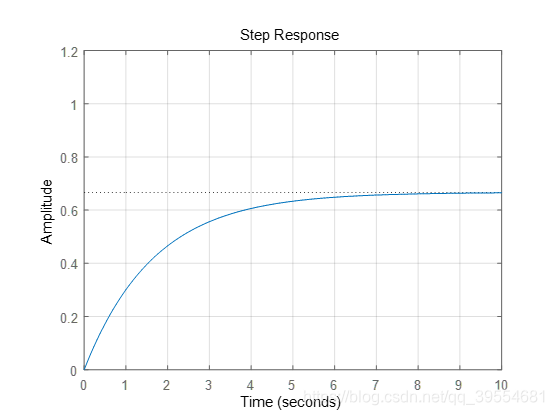
可以看到,闭环后系统的截止频率变大了,时域的响应时间也变快了,系统的动态性能变好;但是,这引入了一个新问题,系统的稳态幅值不为1,利用终值定理可以很直观的看出这一点
lim
t
→
+
∞
f
(
t
)
=
lim
s
→
0
s
1
s
1
5
s
+
2
=
0.5
\lim_ {t \to +\infty} f(t)=\lim_{s \to 0} s\frac{1}{s}\frac{1}{5s+2}=0.5
limt→+∞f(t)=lims→0ss15s+21=0.5
怎样保证系统的稳态幅值呢,一个办法是在闭环系统的前向通道上加入比例环节
K
p
K_p
Kp,

至此,PID控制便登场了。
我们来看这个比例环节对系统的影响,加入比例后,系统的闭环传递函数变为:
G ( s ) = k T s + k + 1 G(s)=\frac{k}{Ts+k+1} G(s)=Ts+k+1k
写成尾一形式
G ( s ) = k k + 1 1 T s k + 1 + 1 G(s)=\frac{k}{k+1}\frac{1}{\frac{Ts}{k+1}+1} G(s)=k+1kk+1Ts+11
可以看到,随着
K
p
K_p
Kp增大,系统的闭环增益
k
k
+
1
\frac{k}{k+1}
k+1k不断趋近于1,系统的稳态误差会越来越小,但不会变为0;
接下来看
K
p
K_p
Kp的变化对系统性能的影响
K
p
=
2
K_p=2
Kp=2
K p = 10 K_p=10 Kp=10
K p = 100 K_p=100 Kp=100
很明显,比例系数 K p K_p Kp的增加对系统带来的影响有:
时域:上升时间减小,系统的响应速度更快,系统的稳态误差降低,有更好的动态和稳态性能;
频域:提高了系统在低频段的幅值响应(对应稳态误差),增加了系统的带宽(对应响应速度),使系统能更好地跟踪输入信号,但是,系统在高频段的幅值响应也增加了,这意味着系统抵抗高频噪声的能力变弱。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









