







在海洋、陆地、大气等微波遥感应用中,常用的有效传感器有 散射计、高度计、无线电地下探测器、微波辐射计、侧视雷达 等5种。只有微波辐射计和侧视雷达可以用于成像,其他都不能。
1 非成像微波传感器
1.1 微波散射计
可以精确测量目标信号强度的雷达都可以称为散射计。大多数雷达经过校准都可作为散射计使用。微波散射计的功能是测量地物表面或体积的散射或反射特性;可以用于 测量目标的散射特性随雷达波束入射角变化的规律、研究极化和波长对目标散射特性的影响。
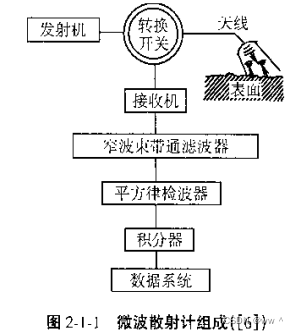
一般的散射计包括 微波发射器、天线、微波接收机、检波器和数据积分器 4个组成部分。
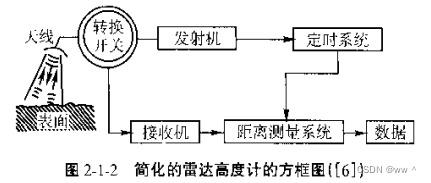
1.2 雷达高度计
1.3 无线电地下探测器
无线电地下探测器是一种测量地下层及其分界的一种装置。该装置一般仅适于在飞机上工作。在空气和地面的交界处通常有强烈反射,必须设法排除强烈反射的影响(比如,调整入射角)。
无线电地下探测器其工作原理包括:(1)低频率波束可以穿透某些地物的表面。(2)可以检测出探测器接收到的反射功率。(3)能够实现足够的距离分辨力。
2 成像微波传感器
2.1 微波辐射计
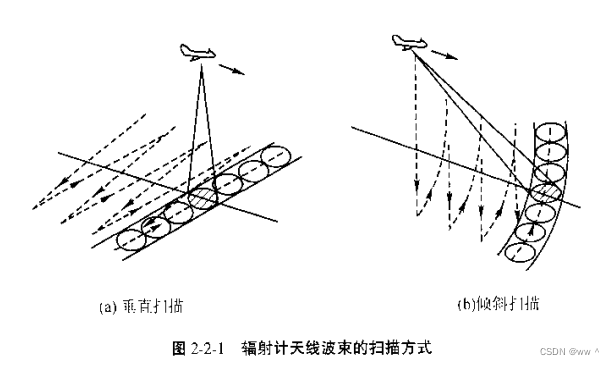
微波辐射计可以记录目标的亮度温度。将其置于地面平台上时,可以记录一个观测单元的亮度温度。将其安装于飞行器上时,可以记录沿飞行方向的一条亮度温度曲线。若将辐射的天线设计成扫描方式,可以获得一个扫描区域的亮度温度数据,或 一条沿着飞行方向、具有一定宽度的带状区域的亮度温度图。
辐射计天线并不会发射雷达波束,辐射计表面仅仅是一种接收机,辐射计天线接收的辐射能量来自于地面物体的发射辐射和反射辐射。(被动微波)
但是,辐射计天线与雷达或通信中的接收机不同:(1)雷达接收机接收的输入信号可能是相位相干且接近于单色的微波。而 物体发射是相位非相干的自然辐射,可以扩展到整个电磁波谱。(2)接收机输出端的信噪比Sn不同。雷达接收机的目的是提取接收信号中的信息,必须Sn>>1。而 辐射计的待测信号通常比噪声功率小得多,因此,辐射计是一种高灵敏度的接收机,可以精密地测量到很小的输入信号。

天线扫描有两种方式:① 机械方式。比如,让天线 或 天线的反射器 摆动。② 电控方式。
2.2 侧视雷达
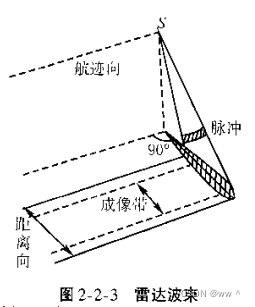
侧视雷达S在飞行平台(飞机、卫星)飞行时,向垂直于航线的方向发射一个很窄的波束,该波束在航迹向上很窄、在距离向上很宽,该波束会在地面上覆盖一个很窄的条带(窄带)。平台在飞行时不断发射波束、不断接收地面窄带上的各种地物的反射信号。由这些波束扫视地面一条带状区域,就会形成成像带。
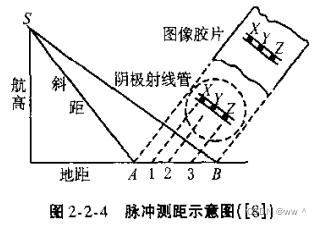
每个波束是由一个雷达S发射的短的脉冲 形成的,这个脉冲遇到目标后,一部分能量经由地物反射,返回雷达天线,即为回波。地面上与飞行平台距离不同的目标反射的回波,会由雷达天线和接收机按照时间上的先后次序 接收下来,并由同步的亮度调制的光点在摄影胶片上按照回波强度大小 记录下来,一条视频回波线就记录了窄带上各种地物的图像。紧接着,雷达会发射下一个脉冲;同时,平台向前飞行了一小段距离;然后,接收地面相邻窄带的地物反射的回波信号。如此继续,就构成了地面成像带的图像。
图2-2-4 表示 一个窄带内几个目标的信号接收情况。A至B几个目标的回波经过电子处理器的处理后,在阴极射线管上形成一条图像线。从A点的回波信号到达天线的时刻起,阴极射线管上的光点即同步开始以恒定的速度在管面扫描。距离雷达最近的地面点(A点)的回波最先在阴极射线管上显示出来,接着是1点的回波、2点的回波...光点的亮度根据回波信号的强弱而变化,并在管面上显示出来(1在X,2在Y...),直到B点回波显示并在胶片上曝光之后,阴极射线管关闭。直到接收到下一个脉冲信号,才会再度启动。
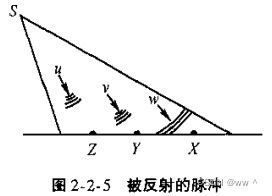
X波段雷达波长 λ 约3cm,但脉冲长度 τ 有几米。脉冲的不同部分会被不同位置的目标反射。如图2-2-5,脉冲发射后,首先是U部分被距离雷达最近的Z点反射,然后V部分被Y点反射。
区分两个邻近目标的要求是:
① 这两个目标所反射的脉冲的两个部分,在不同时间到达天线,即反射脉冲没有重叠。在地面上可以分辨的两个目标的最短距离就是侧视雷达的距离分辨力。
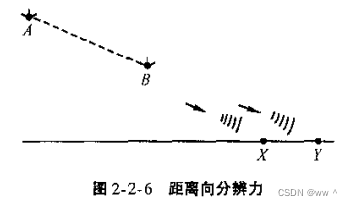
距离分辨力与 飞行平台-目标 之间的距离 无关(与飞行平台的高度无关)。如图2-2-6所示,飞行平台在A点和B点所接收的两个相邻目标的信号差是相同的。
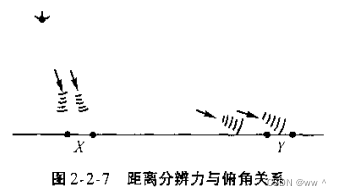
距离分辨力与俯角的关系很大。如图2-2-7所示,X处和Y处的两个相邻目标之间的距离相同;X处的俯角较大,两个目标的反射脉冲会重叠,信号无法分开;Y处的俯角较小,两个目标的反射信号不会重叠。侧视时,俯角越小,距离分辨力更好;近垂直时距离分辨力很差。这与航空摄影的情况正好相反,说明雷达成像必须侧视。
距离分辨力的公式为: 。
。
其中,τ 为脉冲长度,C为电磁波传播速度,β为俯角。
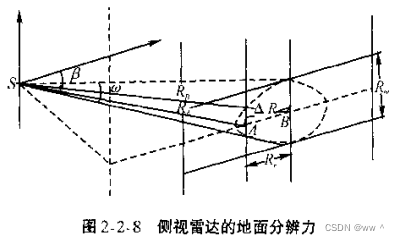
② 在航行方向上,两个目标不能处于同一波束中。在航行方向上能够分辨出的两个目标的最小距离称为方位分辨力:
![]()

式中,Rw为方位分辨力,w为波瓣角,R为斜距,λ为波长,d为天线孔径。
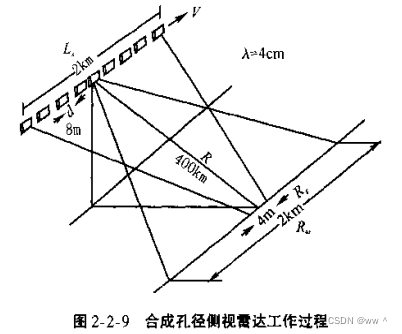
2.3 合成孔径侧视雷达
要提高方位分辨力,需要:① 采用波长较短的电磁波,② 加大天线孔径,③ 缩短观测距离。
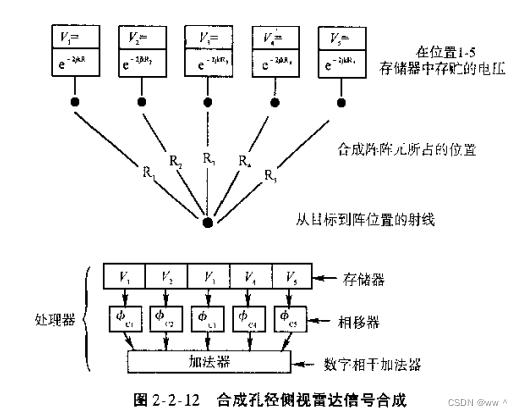
在飞机或卫星上,上述条件都受到限制,所以需要采用合成孔径侧视雷达技术。合成孔径侧视雷达在接收回波时,不像真实孔径侧视雷达,立即成像,而是把目标回波的多普勒相位史存储在“数据胶片”上;之后对数据胶片进行相关处理,形成图像。
合成孔径雷达利用一个小天线沿某一直线方向不断移动,在移动过程中,每个位置上都发射一个信号,接收相应发射位置的回波信号,将其振幅和相位同时贮存下来。
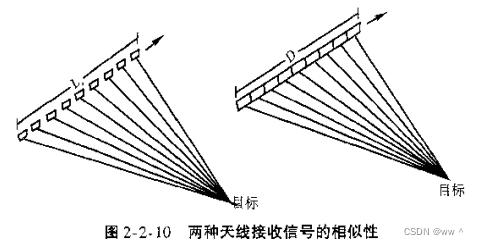
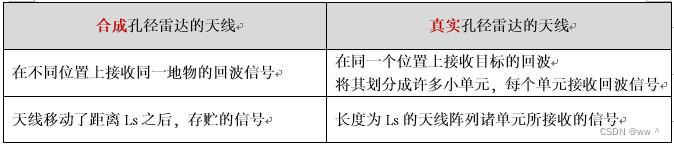
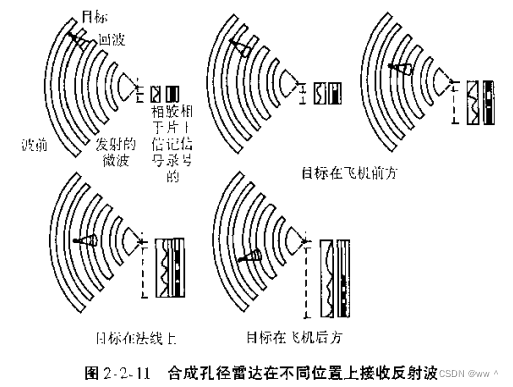
合成孔径雷达对同一目标的信号是在不同时刻得到。在每个位置记录一个回波信号,每个信号的目标与飞行器距离不同,因而相位和强度也不同。
当飞行器向前移动时,随着飞行器与目标的距离减小,飞行器与目标之间的球面波波数减少,当目标在飞行航线的法线上时,距离最小、波数最少。当飞行器飞过法线时,飞行器与目标的距离逐渐增大,球面波波数又逐渐增加。
合成孔径雷达形成的图像是一种相干图像 ,与真实孔径雷达得到的实际地面图像有所差别。合成孔径雷达的图像必须经过处理才能恢复成地面的实际图像。


















 1877
1877

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









