







初学者笔记:
点云数据链接:
链接:https://pan.baidu.com/s/1VTVxn3BntbAr9tGHv6L-HA
提取码:u81q
代码:
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL)
#include<pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <iostream>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <vector>
#include<ctime>
#include<cstdlib>
using namespace pcl;
using namespace std;
typedef PointXYZ PoinT;
int *rand_rgb(){//随机产生颜色
int *rgb = new int[3];
rgb[0] = rand() % 255;
rgb[1] = rand() % 255;
rgb[2] = rand() % 255;
return rgb;
}
int main(){
PointCloud<PoinT>::Ptr cloud(new PointCloud<PoinT>);
if (io::loadPCDFile("C:\\Users\\Administrator\\Desktop\\desk.pcd", *cloud) == -1){
PCL_ERROR("read false");
}
//建立点云的kdtree索引
KdTreeFLANN<PoinT> kdtree;
kdtree.setInputCloud(cloud);
int K = 100;
PoinT searchpoint;
vector<int> pointIdxNKNSearch(K);
vector<float> pointNKNSquaredDistance(K);
srand((unsigned)time(NULL));
int orginal_point= rand() % cloud->size();
PointCloud<PoinT>::Ptr copy_cloud(new PointCloud<PoinT>);
searchpoint = cloud->points[orginal_point];
//绘制较大的球邻域******************************************************************************
float R1 = 0.015;
std::vector<int> pointIdxRadiusSearch;
std::vector<float> pointRadiusSquaredDistance;
kdtree.radiusSearch(searchpoint, R1, pointIdxRadiusSearch, pointRadiusSquaredDistance);
PointCloud<PoinT>::Ptr R_copy_cloud1(new PointCloud<PoinT>);
copyPointCloud<PoinT>(*cloud, pointIdxRadiusSearch, *R_copy_cloud1);
visualization::PCLVisualizer::Ptr viewer(new visualization::PCLVisualizer("3d viewer"));
viewer->setBackgroundColor(1, 1, 1);
visualization::PointCloudColorHandlerCustom<PoinT>rgb3(R_copy_cloud1, 0, 0, 0);
viewer->addPointCloud(R_copy_cloud1, rgb3, "cloud3");
viewer->setPointCloudRenderingProperties(visualization::PCL_VISUALIZER_POINT_SIZE, 3, "cloud3");
// K邻域************************************************************************************************
kdtree.nearestKSearch(searchpoint, K, pointIdxNKNSearch, pointNKNSquaredDistance);
copyPointCloud<PoinT>(*cloud, pointIdxNKNSearch, *copy_cloud);
visualization::PointCloudColorHandlerCustom<PoinT>rgb1(copy_cloud, 255,0,0);
viewer->addPointCloud(copy_cloud, rgb1, "cloud1");
viewer->setPointCloudRenderingProperties(visualization::PCL_VISUALIZER_POINT_SIZE, 10, "cloud1");
for (int i = 0; i < copy_cloud->size();i++)
{
stringstream ss;
ss << i;
viewer->addLine(copy_cloud->points[0], copy_cloud->points[i], ss.str());
}
//球邻域*************************************************************************************************
float R = 0.01;
kdtree.radiusSearch(searchpoint, R, pointIdxRadiusSearch, pointRadiusSquaredDistance);
PointCloud<PoinT>::Ptr R_copy_cloud(new PointCloud<PoinT>);
copyPointCloud<PoinT>(*cloud, pointIdxRadiusSearch, *R_copy_cloud);
visualization::PointCloudColorHandlerCustom<PoinT>rgb2(R_copy_cloud, 0, 255, 0);
viewer->addPointCloud(R_copy_cloud, rgb2, "cloud2");
viewer->setPointCloudRenderingProperties(visualization::PCL_VISUALIZER_POINT_SIZE, 5, "cloud2");
viewer->addSphere(copy_cloud->points[0], R,1,1,1);
viewer->setShapeRenderingProperties(visualization::PCL_VISUALIZER_OPACITY, 0.3, "sphere");
viewer->spin();
}
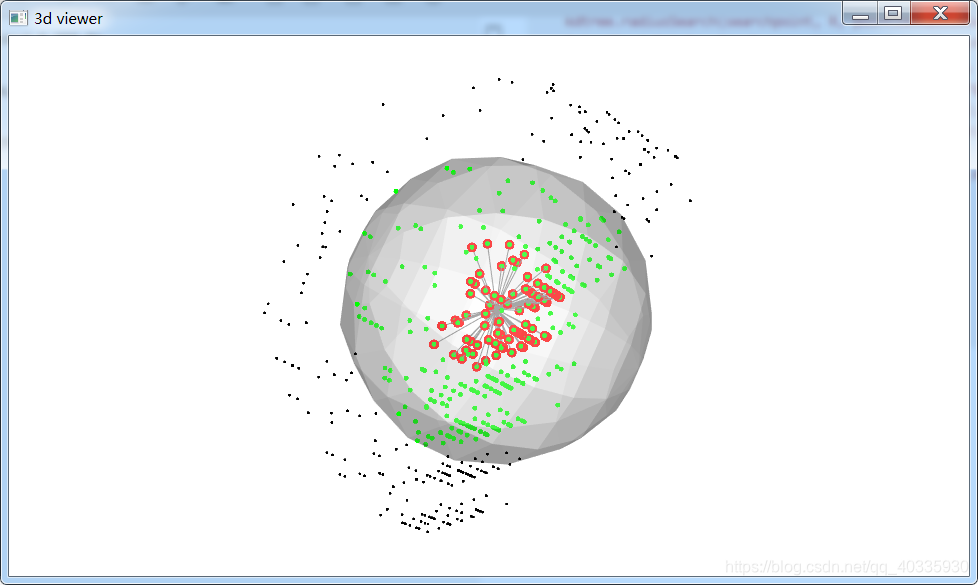
可视化结果:
红色为K邻域点;绿色为球邻域点;黑色为辅助展示数据















 1111
1111











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









