







1. 简述
开发硬件:正点原子STM32F407
开发软件:RT-Thread Studio
RTT版本:4.0.3
RTT参考文档
2. STM32CubeMx配置
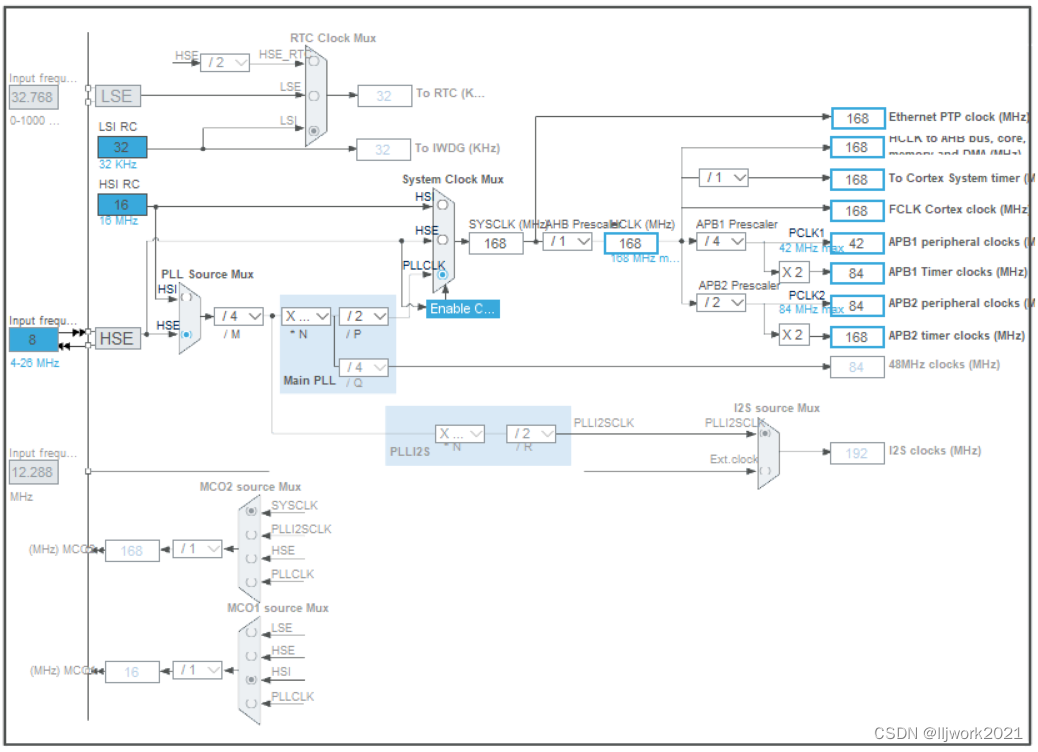
基于芯片创建工程,使用STM32CubeMx配置时钟和CAN外设。
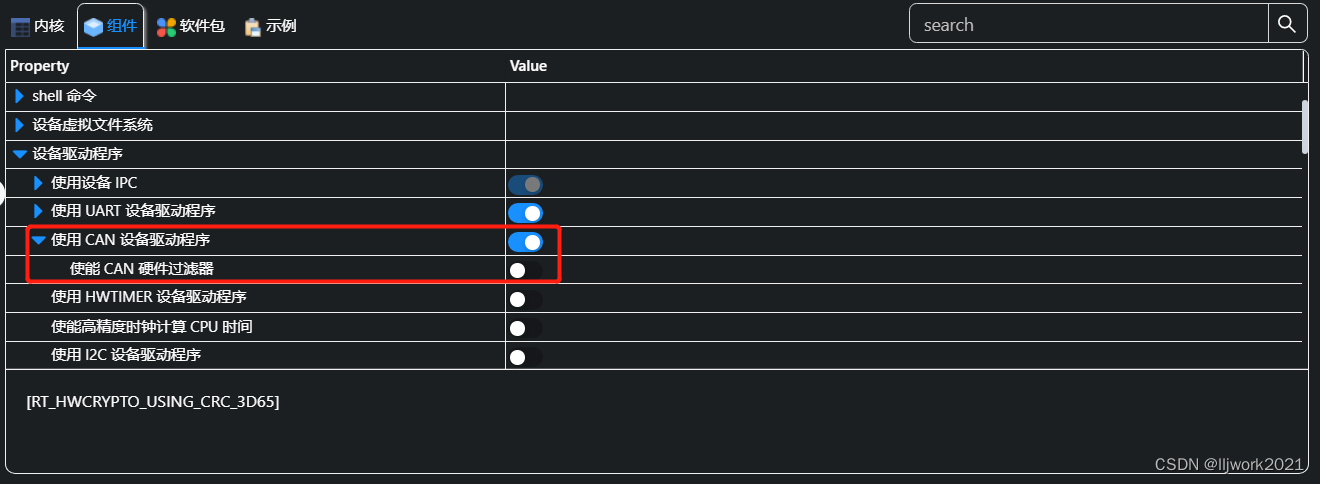
2. 打开CAN驱动框架
3. 设置drivers/board.h
#define BSP_USING_CAN
#define BSP_USING_CAN1
4. 设置drivers/stm32f4xx_hal_conf_bak.h
#define HAL_CAN_MODULE_ENABLE
5. 移植drv_can.h和drv_can.c
5.1 下载文件
drv_can.h和drv_can.c下载链接
将drv_can.h放到drivers/include目录,将drv_can.c放到drivers目录。
5.2 修改文件
我设置STM32F407的APB1时钟频率为42MHz,需要在drv_can.c修改配置。
波特率 = APB1/(1+CAN_BS1_TQ+CAN_BS2_TQ)/分频系数。
这里我只修改了1M和500K的通信速率。
#elif defined (SOC_SERIES_STM32F4)/* APB1 45MHz(max) */
static const struct stm32_baud_rate_tab can_baud_rate_tab[] =
{
// {CAN1MBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 3)},
// {CAN800kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_5TQ | 4)},
// {CAN500kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 6)},
// {CAN250kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 12)},
// {CAN125kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 24)},
// {CAN100kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 30)},
// {CAN50kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 60)},
// {CAN20kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 150)},
// {CAN10kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 300)}
/* APB1 42MHz APB1/(1+CAN_BS1_15TQ+CAN_BS2_5TQ)/最后一位 */
{CAN1MBaud, (CAN_SJW_2TQ | CAN_BS1_15TQ | CAN_BS2_5TQ | 2)}, //通过
{CAN800kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_5TQ | 4)},
{CAN500kBaud, (CAN_SJW_2TQ | CAN_BS1_15TQ | CAN_BS2_5TQ | 4)}, //通过
{CAN250kBaud, (CAN_SJW_2TQ | CAN_BS1_15TQ | CAN_BS2_5TQ | 8)},
{CAN125kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 24)},
{CAN100kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 30)},
{CAN50kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 60)},
{CAN20kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 150)},
{CAN10kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_5TQ | 300)}
};
6. 测试代码
测试代码如下,默认通信速率为1M。
/*
* 程序清单:这是一个 CAN 设备使用例程
* 例程导出了 can_sample 命令到控制终端
* 命令调用格式:can_sample can1
* 命令解释:命令第二个参数是要使用的 CAN 设备名称,为空则使用默认的 CAN 设备
* 程序功能:通过 CAN 设备发送一帧,并创建一个线程接收数据然后打印输出。
*/
#include <rtthread.h>
#include "rtdevice.h"
#define CAN_DEV_NAME "can1" /* CAN 设备名称 */
static struct rt_semaphore rx_sem; /* 用于接收消息的信号量 */
static rt_device_t can_dev; /* CAN 设备句柄 */
/* 接收数据回调函数 */
static rt_err_t can_rx_call(rt_device_t dev, rt_size_t size)
{
/* CAN 接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void can_rx_thread(void *parameter)
{
int i;
rt_err_t res;
struct rt_can_msg rxmsg = {0};
/* 设置接收回调函数 */
rt_device_set_rx_indicate(can_dev, can_rx_call);
#ifdef RT_CAN_USING_HDR
struct rt_can_filter_item items[5] =
{
RT_CAN_FILTER_ITEM_INIT(0x100, 0, 0, 0, 0x700, RT_NULL, RT_NULL), /* std,match ID:0x100~0x1ff,hdr 为 - 1,设置默认过滤表 */
RT_CAN_FILTER_ITEM_INIT(0x300, 0, 0, 0, 0x700, RT_NULL, RT_NULL), /* std,match ID:0x300~0x3ff,hdr 为 - 1 */
RT_CAN_FILTER_ITEM_INIT(0x211, 0, 0, 0, 0x7ff, RT_NULL, RT_NULL), /* std,match ID:0x211,hdr 为 - 1 */
RT_CAN_FILTER_STD_INIT(0x486, RT_NULL, RT_NULL), /* std,match ID:0x486,hdr 为 - 1 */
{0x555, 0, 0, 0, 0x7ff, 7,} /* std,match ID:0x555,hdr 为 7,指定设置 7 号过滤表 */
};
struct rt_can_filter_config cfg = {5, 1, items}; /* 一共有 5 个过滤表 */
/* 设置硬件过滤表 */
res = rt_device_control(can_dev, RT_CAN_CMD_SET_FILTER, &cfg);
RT_ASSERT(res == RT_EOK);
#endif
while (1)
{
/* hdr 值为 - 1,表示直接从 uselist 链表读取数据 */
rxmsg.hdr = -1;
/* 阻塞等待接收信号量 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
/* 从 CAN 读取一帧数据 */
rt_device_read(can_dev, 0, &rxmsg, sizeof(rxmsg));
/* 打印数据 ID 及内容 */
rt_kprintf("ID:%x", rxmsg.id);
for (i = 0; i < 8; i++)
{
rt_kprintf("%2x", rxmsg.data[i]);
}
rt_kprintf("\n");
}
}
int can_sample(int argc, char *argv[])
{
struct rt_can_msg msg = {0};
rt_err_t res;
rt_size_t size;
rt_thread_t thread;
char can_name[RT_NAME_MAX];
if (argc == 2)
{
rt_strncpy(can_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(can_name, CAN_DEV_NAME, RT_NAME_MAX);
}
/* 查找 CAN 设备 */
can_dev = rt_device_find(can_name);
if (!can_dev)
{
rt_kprintf("find %s failed!\n", can_name);
return RT_ERROR;
}
/* 初始化 CAN 接收信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及发送方式打开 CAN 设备 */
res = rt_device_open(can_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);
RT_ASSERT(res == RT_EOK);
/* 创建数据接收线程 */
thread = rt_thread_create("can_rx", can_rx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
rt_kprintf("create can_rx thread failed!\n");
}
msg.id = 0x78; /* ID 为 0x78 */
msg.ide = RT_CAN_STDID; /* 标准格式 */
msg.rtr = RT_CAN_DTR; /* 数据帧 */
msg.len = 8; /* 数据长度为 8 */
/* 待发送的 8 字节数据 */
msg.data[0] = 0x00;
msg.data[1] = 0x11;
msg.data[2] = 0x22;
msg.data[3] = 0x33;
msg.data[4] = 0x44;
msg.data[5] = 0x55;
msg.data[6] = 0x66;
msg.data[7] = 0x77;
/* 发送一帧 CAN 数据 */
size = rt_device_write(can_dev, 0, &msg, sizeof(msg));
if (size == 0)
{
rt_kprintf("can dev write data failed!\n");
}
return res;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can_sample, can device sample);
7. 设置通信速率
/* drivers/drv_can.c */
int rt_hw_can_init(void)
{
struct can_configure config = CANDEFAULTCONFIG;
......
drv_can1.device.config = config;
}
/* components/drivers/include/drivers/can.h */
#define CANDEFAULTCONFIG \
{ \
CAN1MBaud, \
RT_CANMSG_BOX_SZ, \
RT_CANSND_BOX_NUM, \
RT_CAN_MODE_NORMAL, \
};
分析完源码后,发现CAN的通信速录由CANDEFAULTCONFIG 设定,最简单的修改如下。
#define CANDEFAULTCONFIG \
{ \
CAN500kBaud, \ //修改速率为500K
RT_CANMSG_BOX_SZ, \
RT_CANSND_BOX_NUM, \
RT_CAN_MODE_NORMAL, \
};















 554
554











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











