






一、初步整体展示
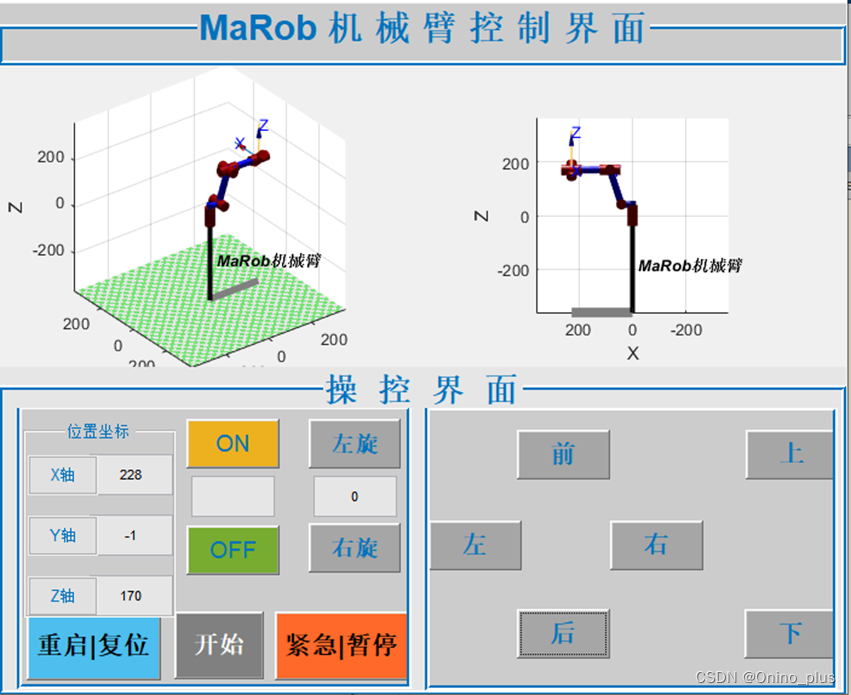
MATLAB GUI控制界面
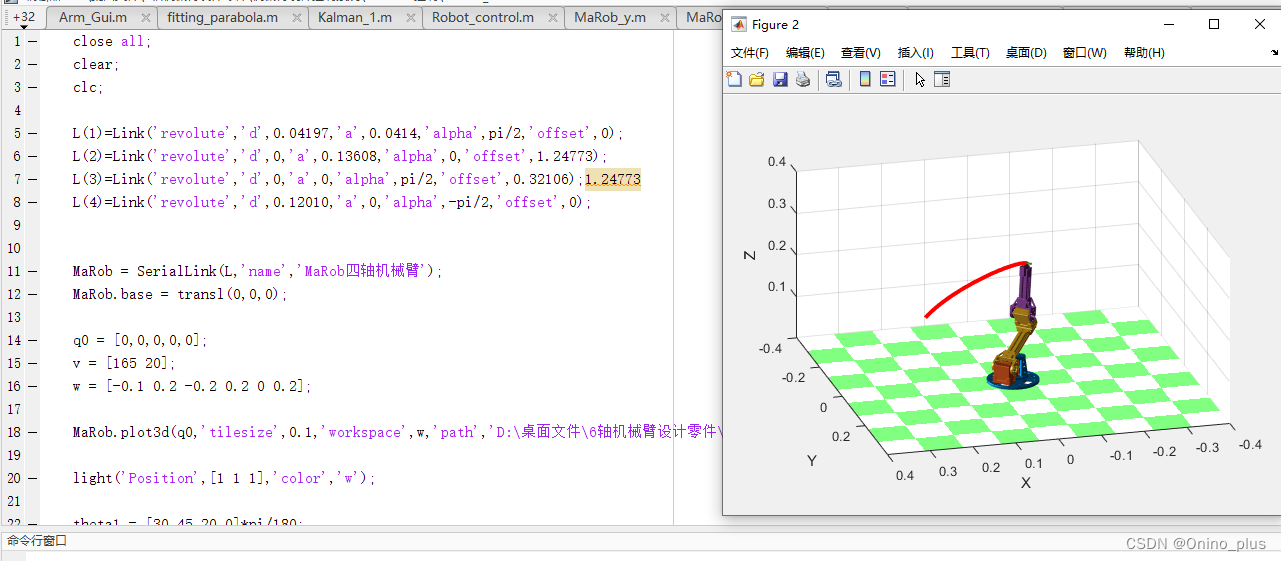
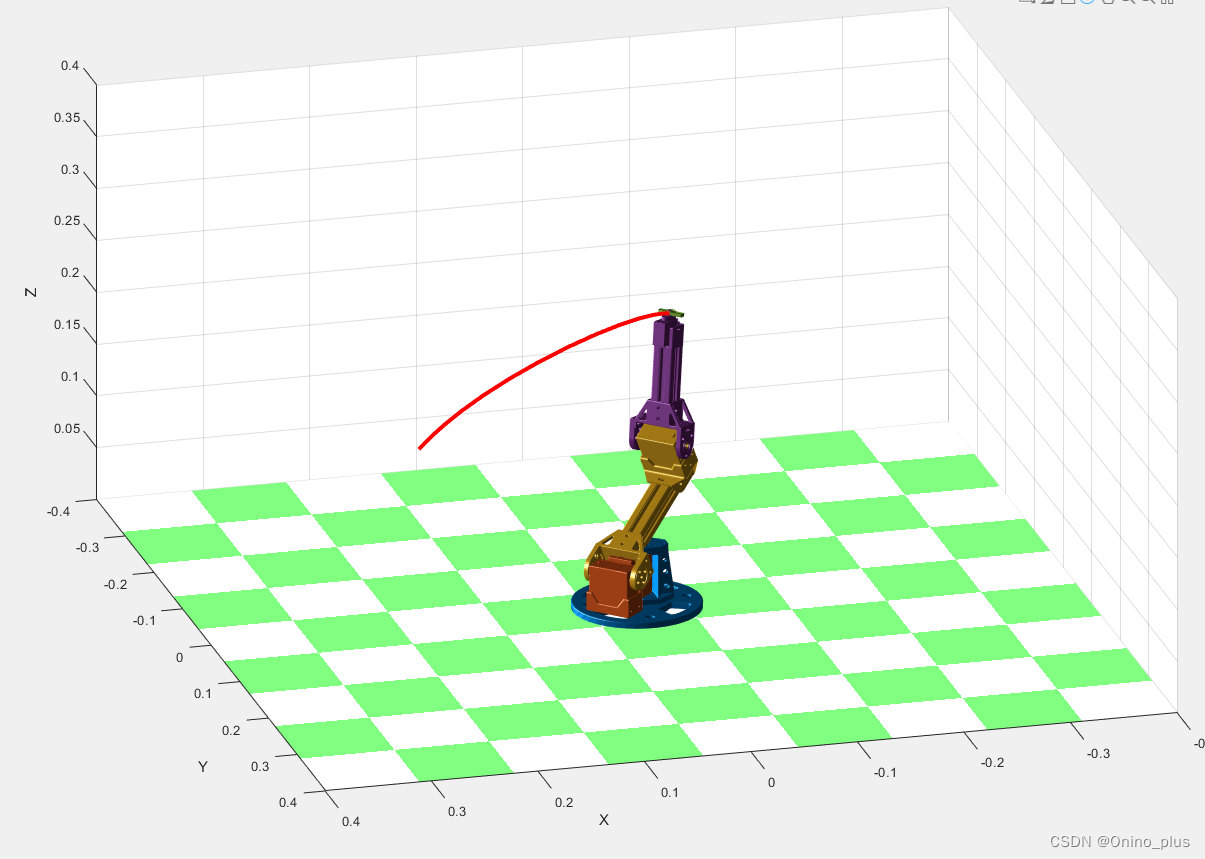
运动学、动力学仿真视频片段
MATLAB R2020
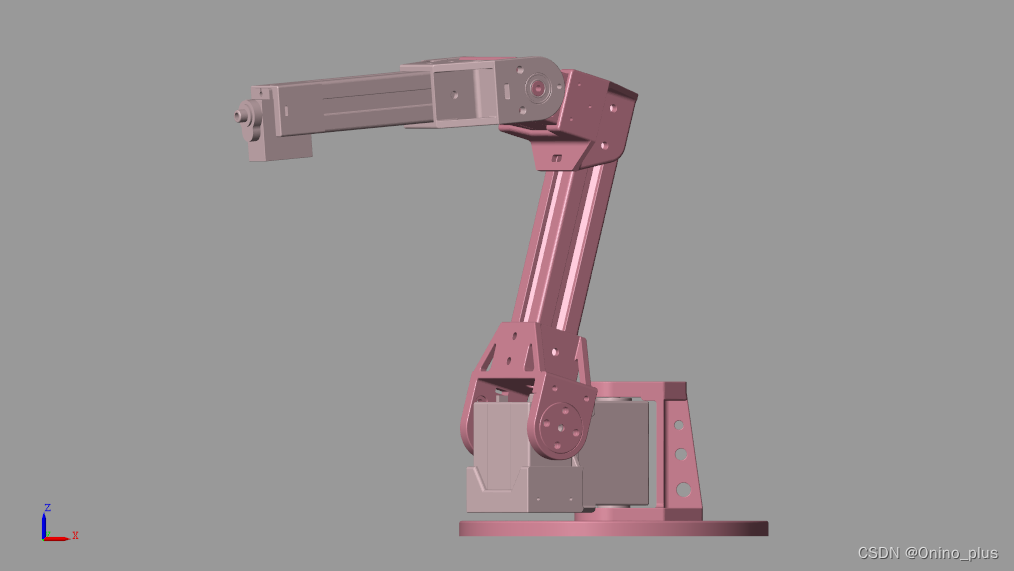
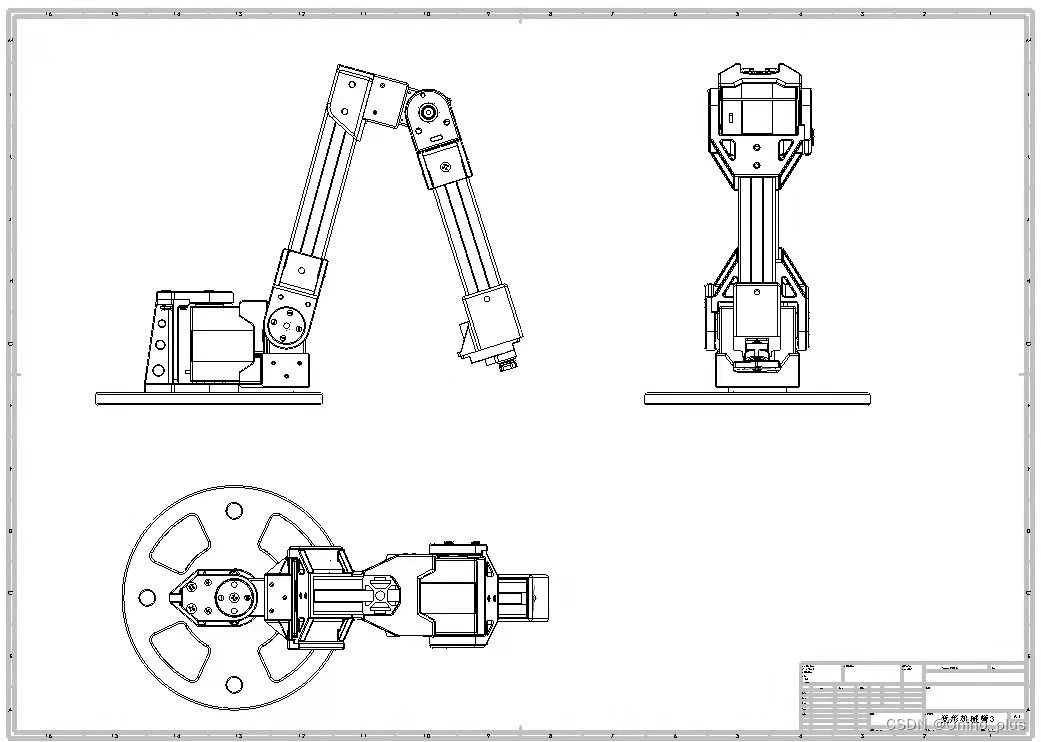
工程图
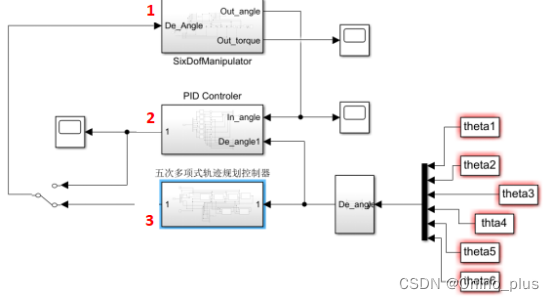
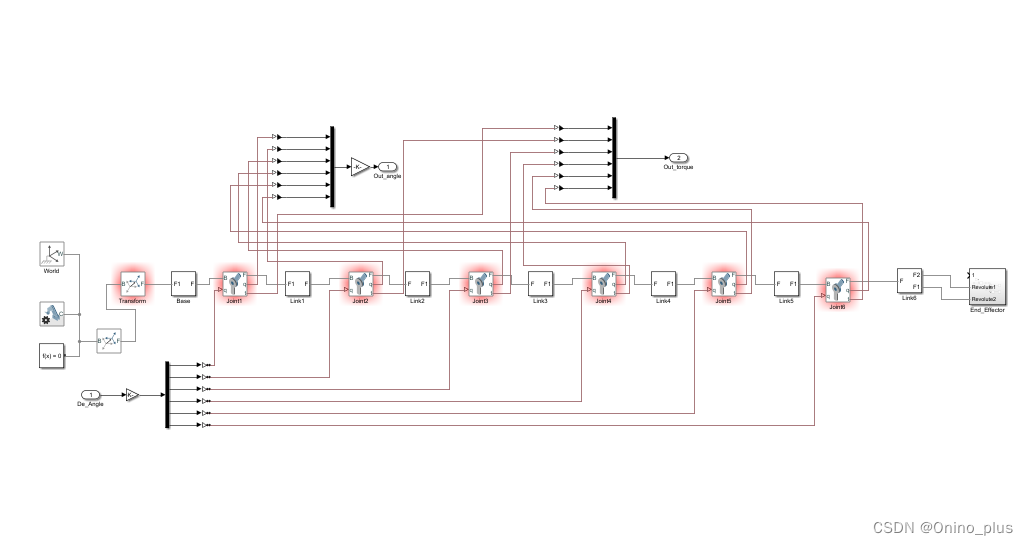
控制器的搭建(Simulink中)
MaRob的特点:
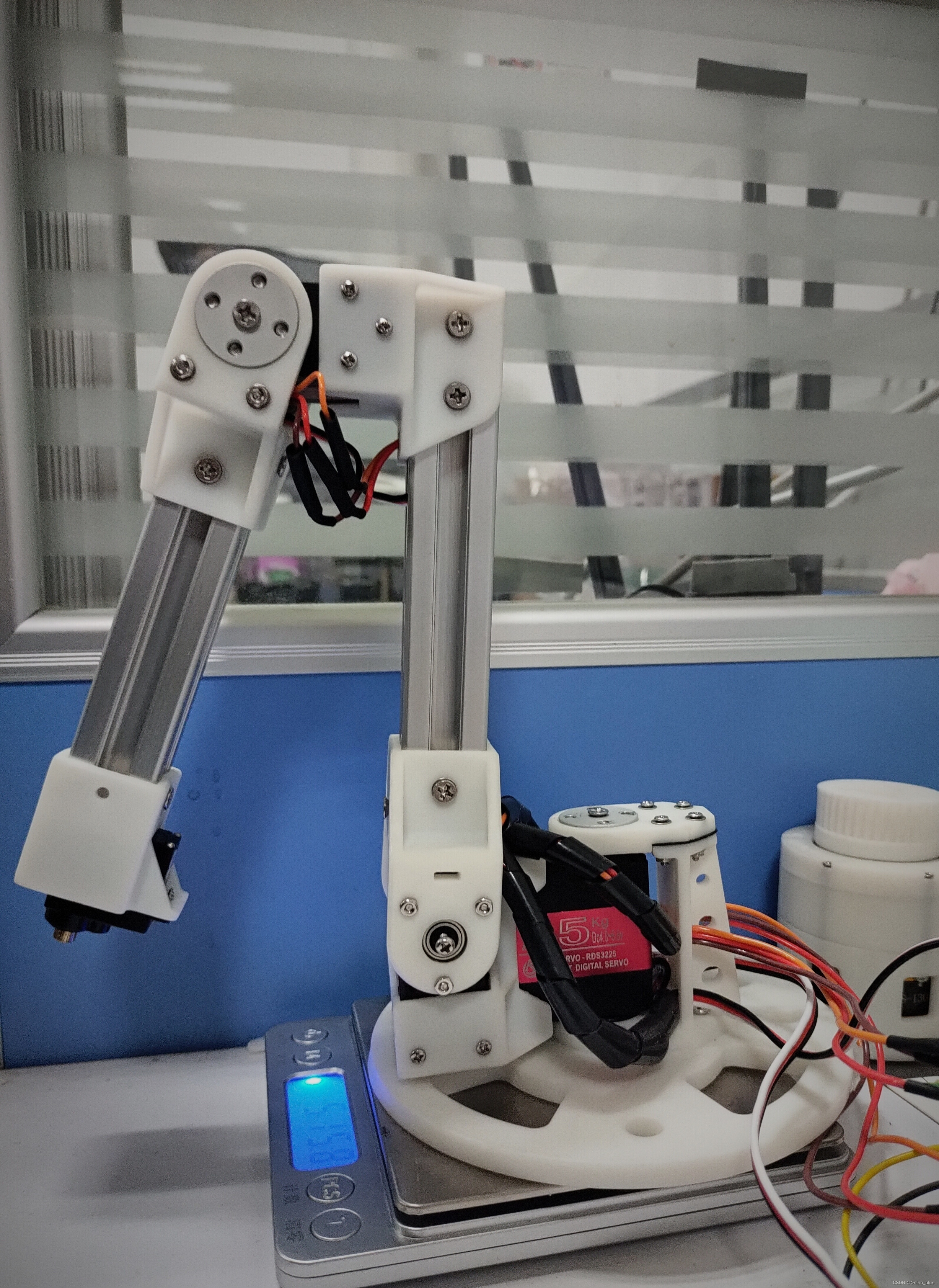
1、整体质量小(约为500克),体积小巧,可体验自由玩弄于手掌间的快感;
2、臂的刚度大,不会由于刚度的影响而运行时产生过大的震颤,且臂长度可自行改变(自由组 合);
3、成本较低,整体简洁大方(考虑了每一根线的走线),可能会稍微有点点工业设计美感;
二、MaRob机器人项目的意义
搭建该机械手的初衷是,学习完机器人的课程和知识,我们应该将其应用到实际中,最好的办法毫无疑问就是自己动手搭建一个。而在搜索栏中搜索发现,目前市面上的简易机械臂,一般有金属架串联的机构,亚克力、薄板做的连杆结构等(有些做的很好),感觉刚度和外观大都不符合,连杆结构好像又与我们常见的串连结构对比,怪怪的。而新手上来就做步进电机、伺服电机+谐波减速器的是有点不怎么现实(或许有大佬可以,我只是个小菜鸡):一方面是经济实力不允许,另一反面耗时耗力而且试错成本太高。所以,就诞生了这个MaRob四轴机器人项目的想法。旨在让刚入门机器人的新手们上手的机会,且兼顾一定的性能、后期持续可开发性以及颜值好一妞妞(作为工业人的一些许执着吧,哈哈哈,自认为外观简洁大方,体积重量小)。
三、内容
该MaRob机器人项目不只是为了搭建出来,更重要的是学习以及持续开发性,主要包含:
(目前主要是基于:MATLAB + Simulink + Arduino;可根据自己的所学进行更改比如谁STM32,ROS等等)
1、应用机器人学的知识包含,机器人的运动学中的DH建模,机器人的正逆解;
2、MATLAB的机器人工具箱,MATLAB GUI界面,MATLAB Simscape Multibody动力学仿真;
3、Arduino作为控制驱动即可,目前是在MATLAB中将数据处理完丢给他;
4、机器人学的关节空间规划(多次项、梯形速度、S形速度)、笛卡儿空间规划;
5、还可以锻炼扭螺丝的能力、焊线的能力……
四、未来的计划
1、控制MaRob机器人的方式:拖动示教(在侧边增加编码器或电位器)、GUI界面控制、同步器利用电位器或编码器制作同比例的同步器;
2、末端执行器:自行发挥可为:夹子、电磁铁、吸盘……
3、看大家的了
















 437
437











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









