







 本文详细探讨了使用MATLAB生成关节空间中的多项式轨迹,包括三次和五次多项式,以及带有中间点的轨迹。通过对比,指出三次多项式在加速度上存在不连续的问题,而五次多项式则能提供更平滑的加速度曲线。此外,还介绍了Corke MATLAB机器人工具箱中的jtraj()函数,证实其同样采用五次多项式插值法,以实现更优的轨迹规划。
本文详细探讨了使用MATLAB生成关节空间中的多项式轨迹,包括三次和五次多项式,以及带有中间点的轨迹。通过对比,指出三次多项式在加速度上存在不连续的问题,而五次多项式则能提供更平滑的加速度曲线。此外,还介绍了Corke MATLAB机器人工具箱中的jtraj()函数,证实其同样采用五次多项式插值法,以实现更优的轨迹规划。
前言
此处为单关节在关节空间中生成多项式轨迹,利用MATLAB编程建立关节空间轨迹生成器,生成其关节空间的路径。
1、三次多项式
已知起始点和终止点的角速度为0;起始点角度值为120°,终止点角度值为60°;整个运动时间t=1s。根据公式: 进行计算,在MATLAB中编程运行生成三次多项式单关节轨迹,结果如图1所示:
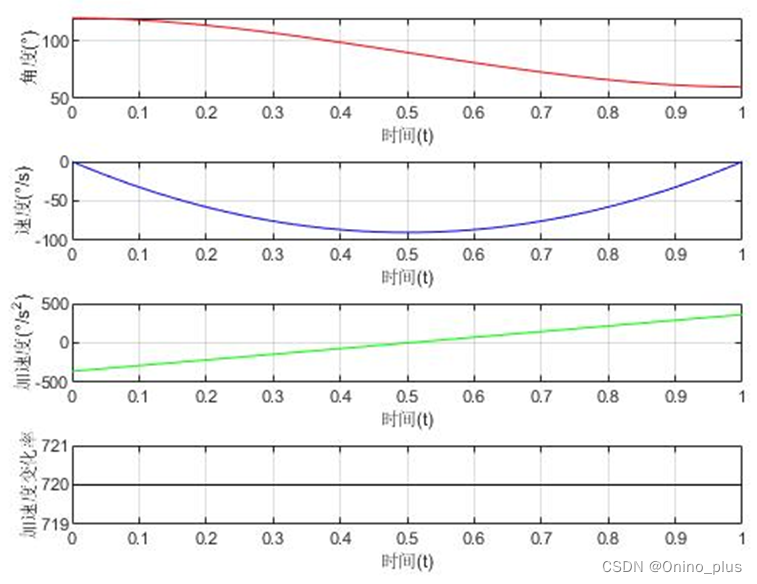
图1 三次多项式轨迹生成图
2、五次多项式
已知起始点和终止点的角速度,角加速度均为0;起始点角度值为120°,终止点角度值为60°;整个运动时间t=1s,则根据公式: 进行计算,在MATLAB中运行生成五次多项式单关节轨迹曲线,结果如图2所示:
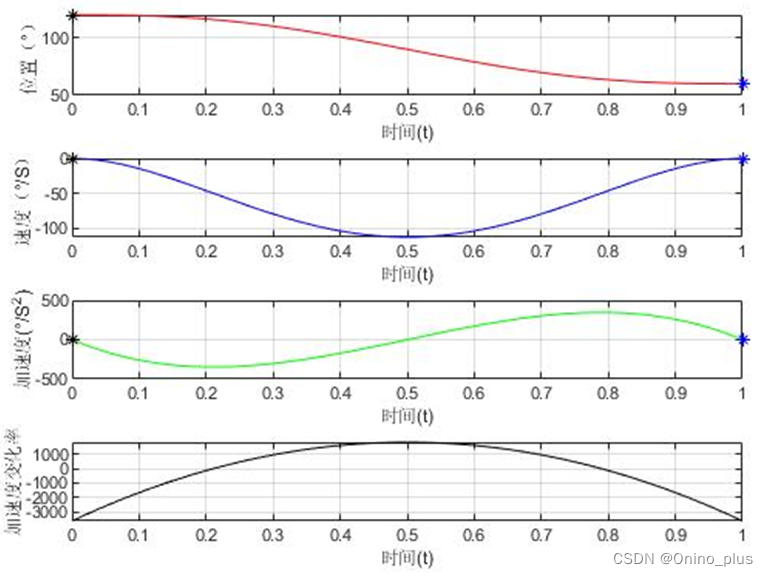
图2 五次多项式轨迹生成图
如图3所示,对比a)中三次多项式和五次多项式的结果可知,三次曲线在初始时刻和终止时刻时,加速度不连续、突变的,会存在冲击。而五次多项式的曲线加速度是连续的,可解决掉三次曲线存在的问题。
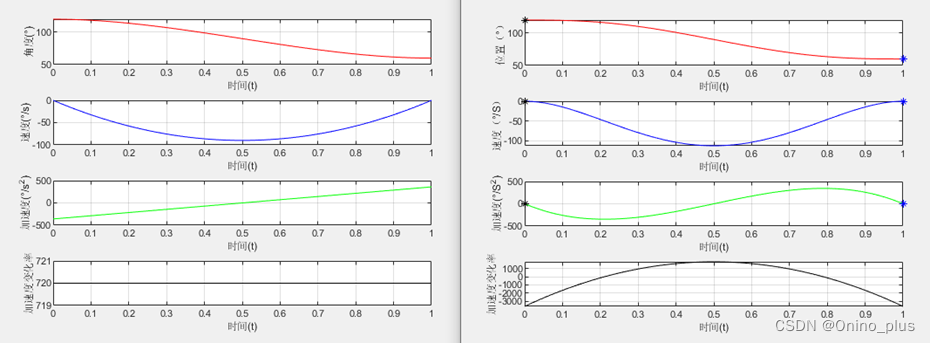
图3 三次多项式和五次多项式轨迹对比图
3、 两段带有中间点路径的三次
已知起始点为60°,中间点为120°、终止点为30°,起始点、终止点的速度和加速度为0,中间点t1=1,tf=2,中间时刻的速度不为0,因此在两条三次曲线的连接处,用速度和加速度均连续作为新的约束条件,并根据公式: 进行计算。在MATLAB中代码运行计算结果如图4所示,其仍存在三次多项式加速度不连续的冲击问题。
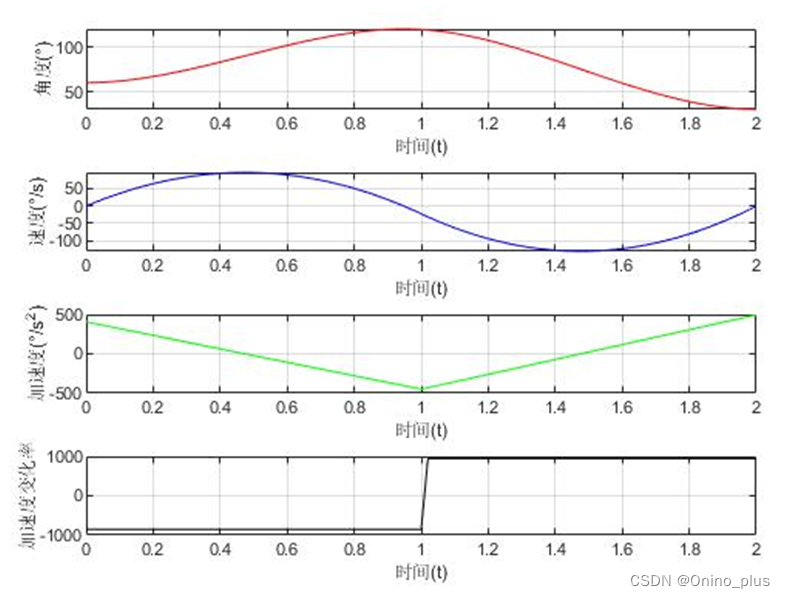 图4 带中间点的三次多项数轨迹生成图
图4 带中间点的三次多项数轨迹生成图
4、Jtraj()函数
利用Corke MATLAB机器人工具箱中的jtraj()函数,如图5所示,对比五次多项式,如图6所示,得出该函数的轨迹规划也是采用五次多项式插值法。
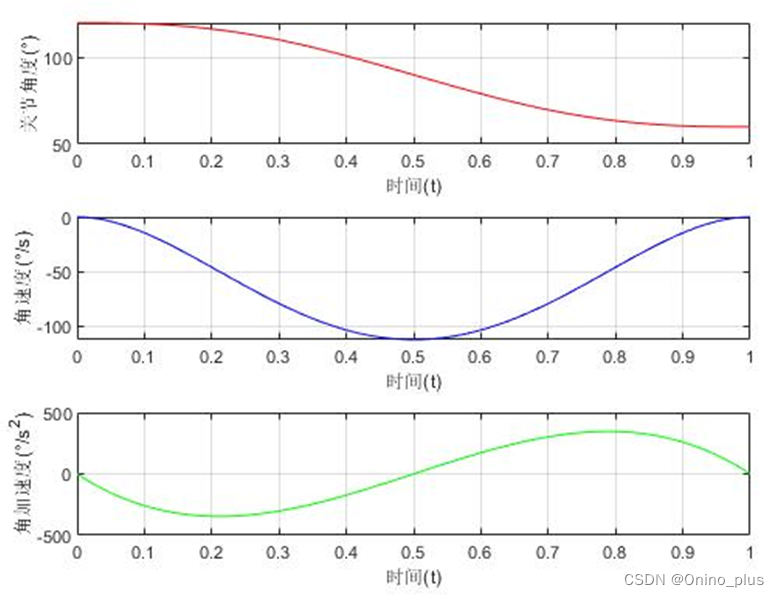
图5 jtraj函数生成的轨迹图
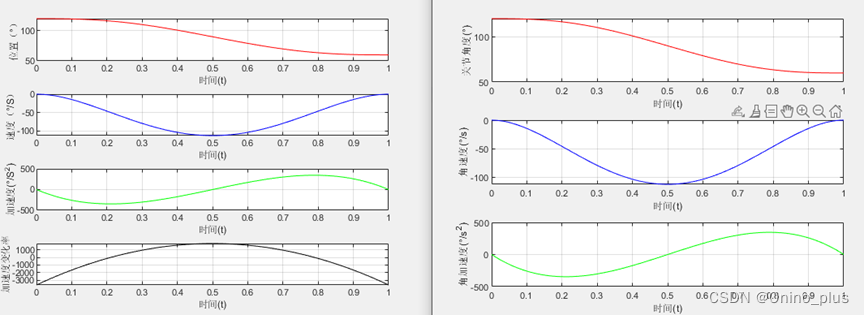
图6 五次多项式与jtraj函数生成对比图
附录:MATLAB运行代码
%% a)三次项多项式
clear;close all;clc;
figure('name','三次多项式');
q3_s = 120; q3_f = 60;
t3_s=0; t3_f = 1;
v3_s = 0;v3_f = 0;
%计算系数
a0_3 = q3_s;
a1_3 = 0;
a2_3 = (3/t3_f^2)*(q3_f - q3_s);
a3_3 = (-2/t3_f^3)*(q3_f - q3_s);
j = 1;
for tc = 0: 0.01: 1
q_3(j) = a0_3 + a1_3*tc + a2_3*tc^2 + a3_3*tc^3; %角度变化函数
qd_3(j) = a1_3 + 2*a2_3*tc + 3*a3_3*tc^2;%角速度
qdd_3(j) = 2*a2_3 + 6*a3_3*tc;%角加速度
qddd_3(j) = 6*a3_3;%加速度变化率
j = j + 1;
end
subplot(4,1,1),plot([0:0.01:1], q_3,'r'),xlabel('时间(t)'),ylabel('角度(°)');grid on;
subplot(4,1,2),plot([0:0.01:1], qd_3,'b'),xlabel('时间(t)'),ylabel('速度(°/s)');grid on;
subplot(4,1,3),plot([0:0.01:1], qdd_3,'g'),xlabel('时间(t)'),ylabel('加速度(°/s^2)');grid on;
subplot(4,1,4),plot([0:0.01:1], qddd_3,'k'),xlabel('时间(t)'),ylabel('加速度变化率');grid on;
%% b五次多项式
figure('name','五次多项式');
a_array1 = 0;a_array2 = 0;%起止加速度值
t_array1=0;t_array2=1;%起止时间值
q5_s 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









