







数据集基本信息汇总
| Dataset | Year | Download | IMU Carrier | Sample Frequency | Scale (Total) | Number of Subjects | Number of Sequences(Total) | Ground Truth | Motion Context |
| RIDI | 2017 | Lenovo Phab2 Pro(Google Tango phone) | 200Hz | 10 | 98 | Lenovo Phab2 Pro(Google Tango phone) |
| ||
| OxIOD | 2018 | iPhone 5/6, 7 Plus, Nexus 5 | 100Hz | 14.7h/42.6km | 5 | 158 | Vicon |
| |
| 2019 | Samsung Galaxy S9, Google Pixel 2 XL | 200Hz | 42.7h | 100 (seen/unseen) | 276 | Asus Zenfone AR(Google Tango phone) |
| ||
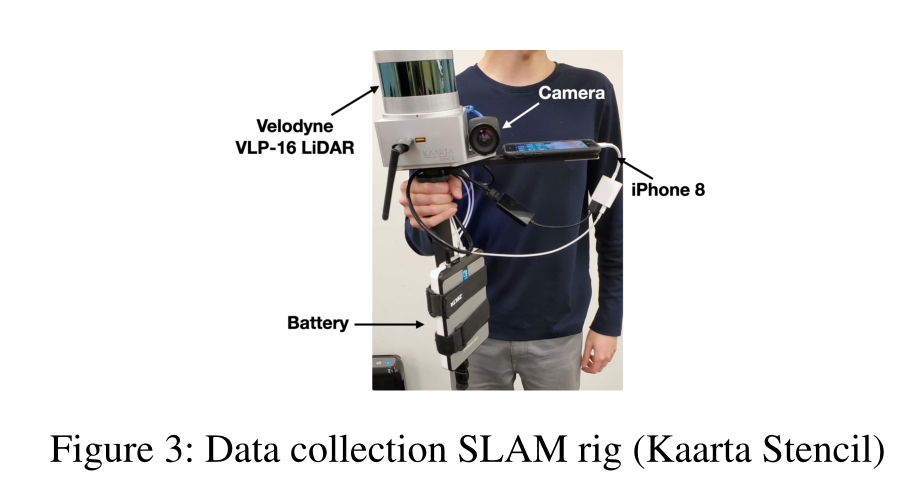
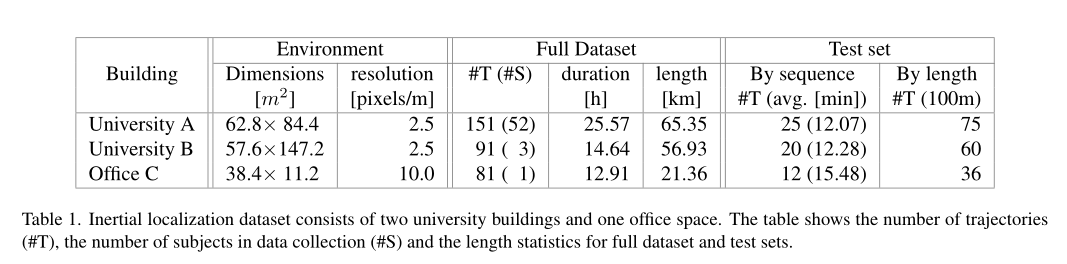
| IDOL | 2020 | iPhone 8 | 100Hz | 20+h | 15 (known/unknown) | 84 | Kaarta Stencil |
| |
| CTIN(未公开) | 2021 | Samsung Note, Galaxy | 200Hz | 5 | 100 | Google ARCore |
| ||
| NILoc | 2022 | 200Hz | 53.1h/143.6km | Asus Zenfone AR(Google Tango phone) |
|
数据集详细信息
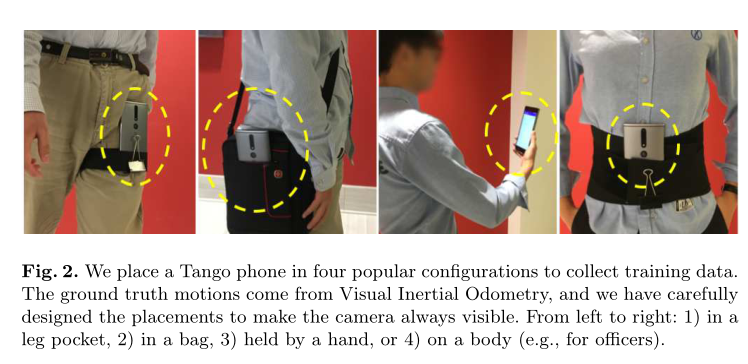
RIDI
| ground truth获取方法:
|
|
| 开源数据采集APP(单Tango设备): |
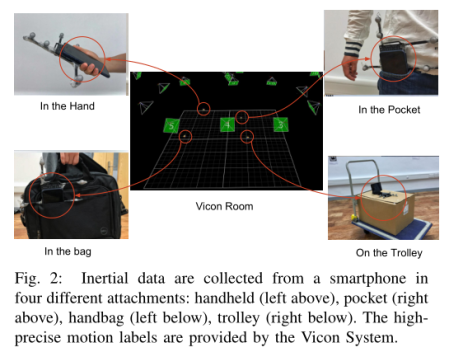
OxIOD
| ground truth获取方法: |
|
RoNIN
| ground truth获取方法: |
|
| 其他相关说明: |
|
| 开源数据采集APP: |
|
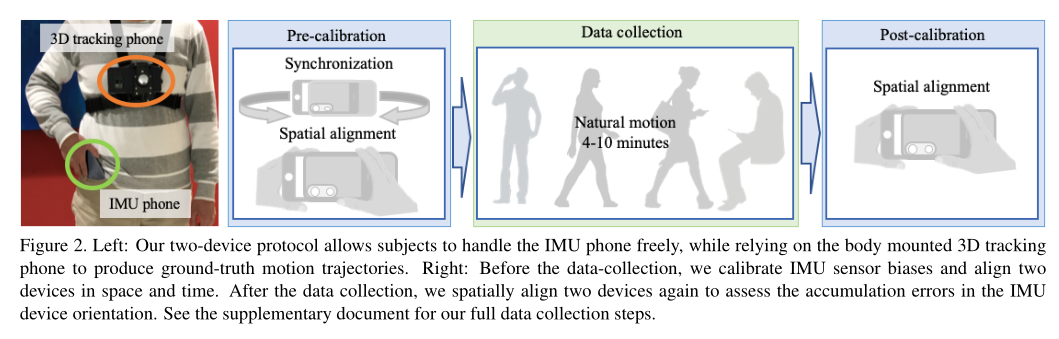
IDOL
| ground truth获取方法: |
[[-0.999870, 0.006520, -0.014725], [-0.006843, -0.999734, 0.022022], [-0.014578, 0.022120, 0.999649]]
| |
| 同步校准方式: | 每一次都以用户在空中快速推压数据采集设备开始和结束,在IMU数据中产生“同步尖峰”。该峰值用于执行iPhone和模板数据的时间对齐,因为我们发现,由于采样率较高,这种方法比依赖设备之间的ntp同步时间戳稍微更精确。可以使用峰值检测算法或简单地截断轨迹的开始/结束来省略这些伪影,尽管我们将它们保留在数据集中,因为它们对结果的影响可以忽略不计。 | |
| ❓现有问题: |
| |
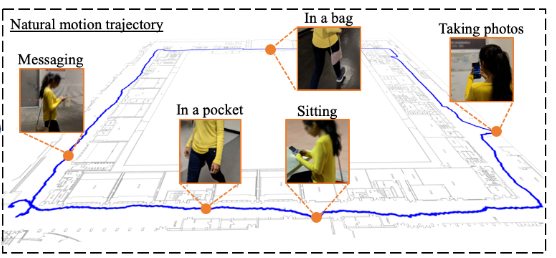
NILoc
| ground truth获取方法: |
| |
| 统计数据: |
| |
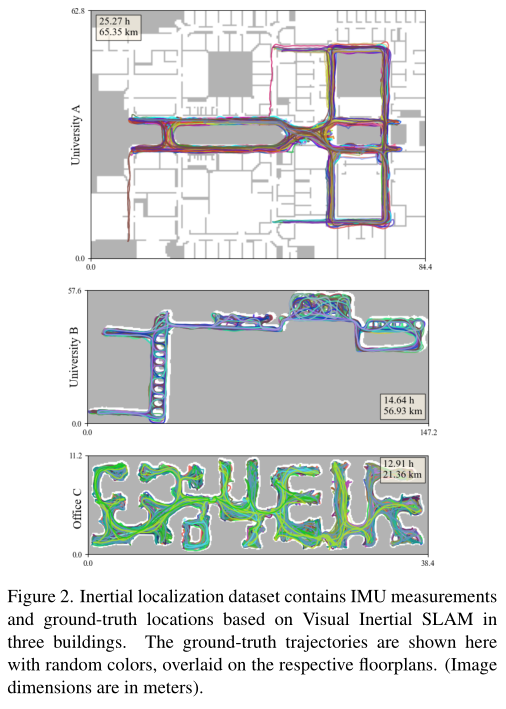
| 轨迹可视化图: |
| |















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









