







背景介绍
软体机器人在军事以及医疗等方面都具有广泛的应用前景,因此,本推文对相关的研究进行简要概括,并针对现存的问题提出一些自己的思考与解决办法。
磁性软体机器在生物医学领域具有广泛的应用,例如:自折叠式“折纸”机器人可以在肠道中爬行、修补伤口、物体转运等;胶囊状的机器人可以沿着胃的内表面滚动,能够进行活组织检查并运送药物。此外,科学家们还研制出了尺寸从几百微米到几厘米不等的线型机器人,它们有可能在大脑血管中穿行,有望应用于中风或动脉瘤的治疗。
——赵选贺
论文分享
近些年来,软体机器人磁性粒子不可重构(由于制备工艺的特点),在设计阶段就需确定好磁性粒子的分布,严重限制了应用范围,也就是说软体机器人一旦制备完成,只能具有一种特定的变形行为。
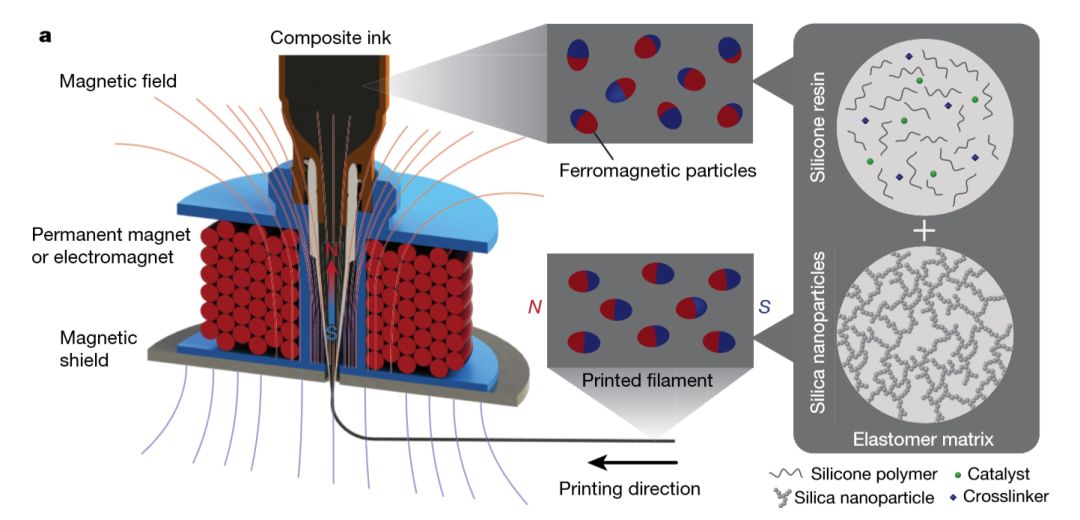
2018年,麻省理工大学赵选贺通过外部磁场控制软体机器人的运动行为,相关工作在nature上发表(KimY, Yuk H, Zhao R, Chester SA, Zhao X. Printing ferromagnetic domains foruntethered fast-transforming soft materials. Nature. 2018;558(7709):274-9.)。
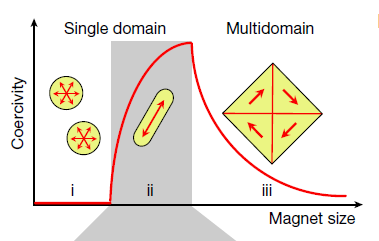
近来,瑞士联邦理工学院相关研究人员采用电子光刻技术,利用磁性材料保磁力受材料尺寸影响的性质(如下图所示),设计出了一款可重构(磁性粒子)的机器人,拓宽了软体机器人的使用范围,相关工作在nature上发表(Jizgai Cui, Tian-Yun Huang. Nanomagnetic encoding of shape-morphing micromachines. Nature. 2019;575:164-168.)
核心问题
赵选贺在《Nature》评述文章“Soft microbots programmed by nanomagnets”中指出,Much work must still be done to achieve the full potential of magnetic soft robots for biomedical applications across various length scales. They must be designed using quantitative models to optimize their performance for specific tasks in relatively weak magnetic fields — that is, to work out which reconfigurations are needed, the sizes of the forces that the robot must exert on its environment, and the speeds at which reconfigurations should occur and with which the forces should be applied.
问题契合点
如何构造软体机器人内部磁性粒子的分布,使之在外界磁场作用下具有特定的变形,进而使得软体机器人具有特定的功能。
根据《有限元以及神经网络的相似性》(前期推文)中对自然界的理解,该问题可以看做为优化问题,相当于在外加磁场作用下,如何构造磁性粒子的分布,使得系统(指定变形下)能量最低。其中,优化目标为体系整体变形偏差最小,自变量为磁性粒子的自由度。
作为力学工作者,我们最擅长的就是建立力学模型,量化磁性软体机器人在外界环境下的变形规律,进而采用优化理论得到磁性粒子的最优分布,以往具有的相关工作经验有:
-
建立可以描述磁性软体机器人的变形行为的UEL单元;(ABAQUS UEL单元二次开发)
-
采用优化算法(遗传算法)解决实际工程问题的经验。(优化设计)



















 1774
1774

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









