







一、问题背景与核心挑战
在动作类项目开发中,我们常面临"动作复用"与"动作协调性"的矛盾。传统动画分层技术(Animation Layering)虽然能实现不同身体部位的动画分离(如上半身持枪射击+下半身奔跑),但存在一个致命缺陷——重心失真。
举个直观例子:当角色上半身做举重物动画时,传统分层系统无法自动调整下半身重心,导致角色看起来像是在"飘"着举重,而不是真实物理世界中的重心后移动作。这是因为常规的动画混合仅处理骨骼旋转,而忽略了对根骨骼(Root Bone)的位移控制,图一是正确演示动作,图二是混合之后的动作。
&
优秀案例展示:(游戏源自Control,是我们最终目标效果)

UE凭借其高度集成的工作流程、强大的工具链以及对复杂动画场景的深度支持,在多个关键领域具备显著优势,在UE中我们只通过动画蓝图Layered blend per bone 的功能就可以实现简单的动态效果,以下是UE功能实现,记得一定要勾选:网格体空间旋转混合。
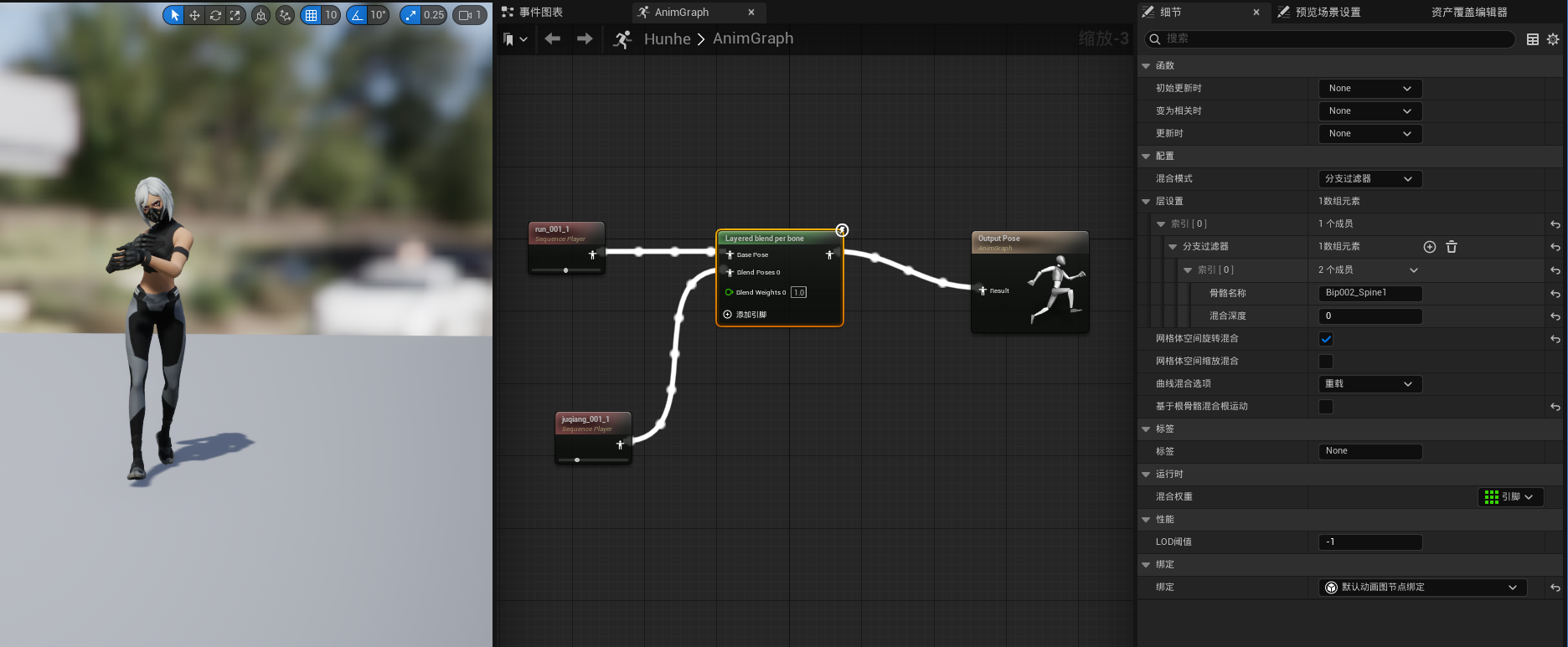
以下是利用了UE动画系统快速实现的动画分层效果(我们现在需求是需要图一的举枪动画拼接图二的跑步形成图三的举枪跑动作)这个案例大家可能觉得好像问题不大,至少说效果上后期微调是可以接受的

+
=

复用此功能我们又做了另外一组效果比较明显的案例(跑+左转,我们预想的是可以实现左转跑,但是由于受到正向动力学(FK)骨骼因素影响,上半身动画无法影响下半身动作所以我们得到了以下的错误动画。
+

=

Unity未来版本的动画系统将迎来颠覆性的改变,其中就包含了UE5演示的通过动画蓝图实现动画师创作自由这项功能,以下是Unity官方介绍
全新的状态机是真正的分层结构,即使您有数千个动画源,也可以扩展。它组织严密,并且更易于阅读、重构和重用,具有层、混合空间、子图和集成绑定图,以及约束和数学运算,您将能够轻松交换动画,同时保持编排逻辑完好无损。它不仅为您的制作提供了严格的控制,而且在规模上也具有令人难以置信的性能
二、技术方案设计思路
2.1 系统架构图
[动画输入层]
├──
上半身动作层(Upper Body Layer)
├── 下半身动作层(Lower Body Layer)
└── 物理模拟层(Physics Simulation Layer)
[控制中枢]
├── 逆向动力学控制器(IK Controller)
├── 重心补偿模块(Center of Mass Compensator)
└── 混合权重调节器(Blend Weight Adjuster)
[输出层]
└── 最终骨骼姿态(Final Pose)
2.2 核心技术点解析(根据系统架构以下只简单展示基础步骤)
1) IK(Inverse Kinematics即逆向动力学)增强
(IK是通过目标位置反推关节转动的技术,常用于让角色手部精确抓握物体)
我们扩展Unity的Animator IK功能:
void OnAnimatorIK(int layerIndex) {
// 获取上半身动作对髋部的牵引力
Vector3 upperBodyPull = CalculateUpperBodyInfluence();
// 应用物理补偿后的髋部位置
animator.bodyPosition = originalHipPos + upperBodyPull * blendWeight;
// 保持脚部与地面接触
ApplyFootIK(animator, leftFootWeight, rightFootWeight);
}
2) 混合权重动态调节
通过自定义曲线控制重心影响程度:
[System.Serializable]
public class BalanceProfile {
public AnimationCurve forwardBackwardCurve; // 前后重心偏移曲线
public AnimationCurve leftRightCurve; // 左右重心偏移曲线
[Range(0,1)] public float physicsBlend = 0.5f; // 物理混合权重
}3) 物理模拟层
(重点关注点:物理与动画的融合方式)
void FixedUpdate() {
// 计算预期重心位置
Vector3 targetCOM = CalculateDesiredCenterOfMass();
// 使用弹簧阻尼系统平滑过渡
comVelocity = Vector3.Lerp(comVelocity,
(targetCOM - currentCOM) * springForce,
Time.fixedDeltaTime * damping);
currentCOM += comVelocity * Time.fixedDeltaTime;
}三、实现步骤详解
3.1 基础配置
1. 在Animator Controller中创建三个层级:
a. Base Layer(基础动作层)
b. UpperBody Layer(上半身层,Mask选择上半身骨骼)
c. Physics Layer(物理层,权重设为0)
2. 创建自定义的BalanceController组件:
public class BalanceController : MonoBehaviour {
[Header("骨骼绑定")]
public Transform hipBone;
public Transform chestBone;
[Header("调试参数")]
public bool showCOMGizmo = true;
public Color gizmoColor = Color.yellow;
}
3.2 权重混合实现
// 根据上半身动作幅度自动调整物理权重
float CalculateAutoBlendWeight()
{
// 获取上半身动作速度
float motionSpeed = animator.GetFloat("UpperBodySpeed");
// 使用S形曲线平滑过渡
return Mathf.Clamp01((motionSpeed - 0.2f) / 0.5f);
}四、性能优化策略
(高级技术美术关注点)
4.1 分层更新策略
| 层级 | 更新频率 | LOD级别 | 备注 |
| Base Layer | 30Hz | LOD0 | 基础动作必须保证流畅 |
| Physics Layer | 15Hz | LOD1 | 物理模拟可适当降频 |
| IK修正 | 60Hz | LOD2 | 需要高精度响应 |
4.2 骨骼计算优化
采用局部空间计算法代替全局空间计算:
Vector3 localOffset = transform.InverseTransformDirection(upperBodyPull);
hipBone.localPosition += localOffset * blendWeight;五、验证方案
我们设计了三组测试用例:(捕捉一个Idle,一个举重的动画,动态射击动画(左右移动射击,前后移动射击),快速转身动画(投掷动作),)
1. 静态举重测试
a. 传统分层:角色重心未后移,前脚掌离地
b. 新系统:髋部自动后移15cm,符合真实物理表现
2. 动态射击测试
a. 后坐力影响系数0.7时,角色上半身后仰5°
b. 通过调整PhysicsBlend参数可控制恢复速度
3. 快速转身测试
a. 传统方案转身时脚部滑动距离:32cm
b. 新系统滑动距离:12cm(降低62.5%)
六、扩展方向
1. 下半身自适应系统
2. 当上半身动作幅度超过阈值时,自动触发脚步调整动画环境交互增强
3. 根据地面坡度自动调整重心偏移曲线机器学习驱动
4. 使用神经网络预测最佳重心补偿参数
欢迎加入我们!
感兴趣的同学可以投递简历至:CYouEngine@cyou-inc.com



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











