






 本文详细介绍了Photoshop中的堆栈模式,包括标准偏差、范围、方差、峰度、偏度、平均值、熵、中间值和总和等,这些模式在减少噪点、异常检测、变化分析、长时间曝光和环境监测等方面发挥着关键作用。
本文详细介绍了Photoshop中的堆栈模式,包括标准偏差、范围、方差、峰度、偏度、平均值、熵、中间值和总和等,这些模式在减少噪点、异常检测、变化分析、长时间曝光和环境监测等方面发挥着关键作用。
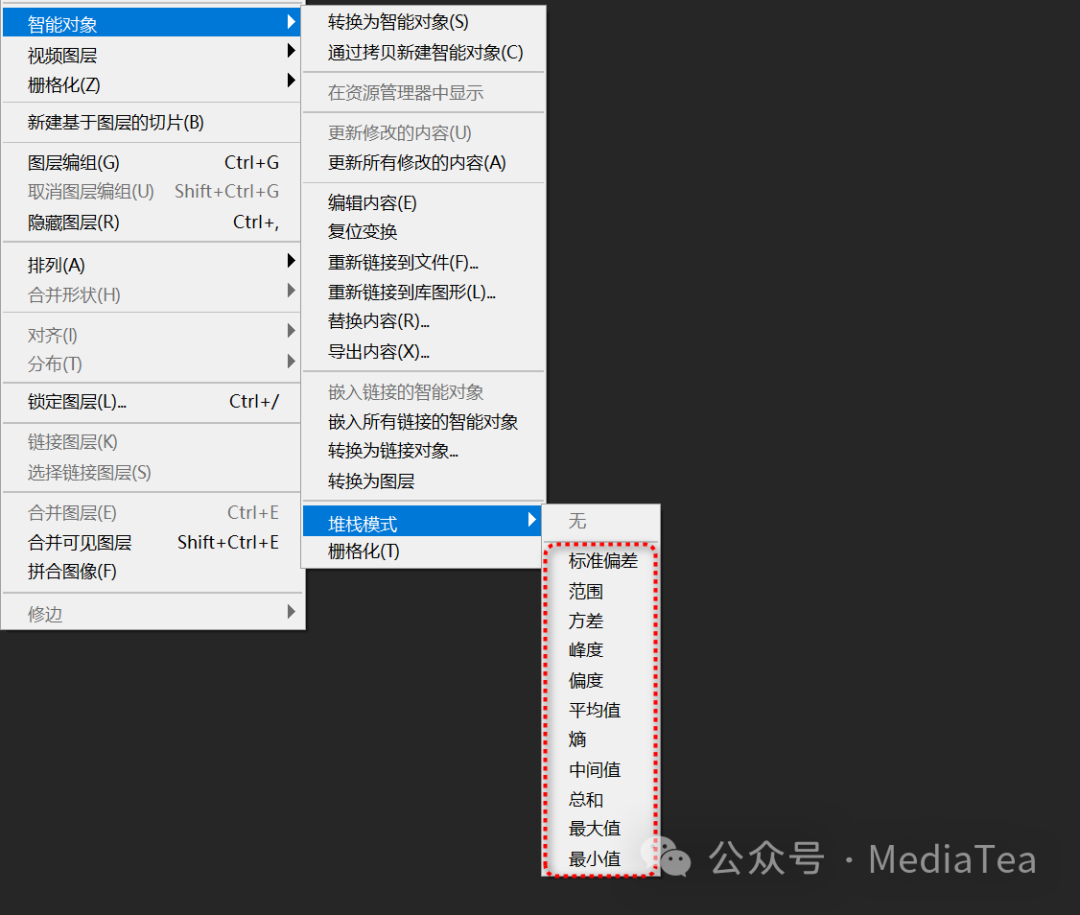
Ps菜单:图层/智能对象/堆栈模式
Layer/Smart Objects/Stack Mode
堆栈模式 Stack Mode是一种处理一系列重叠图像的方法,通常在智能对象中使用。堆栈模式通过分析并组合图像序列并渲染出最终效果。
堆栈模式特别适用于减少噪点、删除不需要的元素或创建特殊效果等场景。
其工作原理是:将图像序列中的所有图像的红、绿、蓝通道分别进行比较分析,并按一定方式计算出新的红、绿、蓝通道,最后将它们复合为最终效果。
比如,“最大值”模式将找到图像序列中对应每个像素点位置的最大的红、绿、蓝通道值,并将它们作为新的红、绿、蓝通道渲染为最终效果。
要注意的是,堆栈模式仅限于处理非透明像素。
标准偏差
Standard Deviation
通过计算图像序列中每个像素位置的标准偏差值来生成效果图像。
一个较大的标准偏差,代表大部分数值和其平均值之间差异较大。
一个较小的标准偏差,代表这些数值较接近平均值。
因此,此模式下,画面变化越大的区域越亮,变化越小的区域越暗。
应用:监测与分析
比如,使用安全摄像头进行夜间监控,摄像头每隔一定时间自动拍摄场景的静态照片。
在一个特定的夜晚,摄像头捕捉了数百张图像。如果想要快速识别出哪些时刻发生了异常活动,比如有人或动物通过。
通过将图像序列应用“标准偏差”模式就可以渲染出一张图像,该图像突出显示了在不同时间点上发生最大变化的区域。
此方法同样适用于环境监测、野生动物观察和科学研究。
范围
Range
通过计算图像序列中每个像素位置的最大值与最小值之差来生成效果图像。
应用:可视化亮度变化
比如,用延时摄影的方法定时某个景点的照片,以捕捉从日出到日落的光照变化。
应用“范围”模式之后渲染出一张图像,图像中高亮的部分显示了一天中光照变化最大的区域,而最暗的部分则表示光照变化最小的区域。
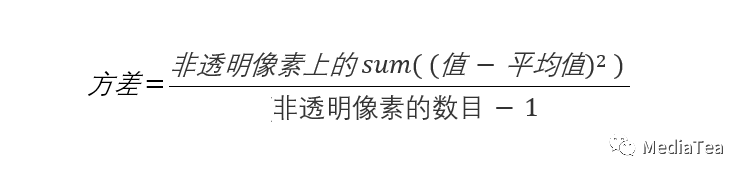
方差
Variance
“方差”是各个数值与平均值差的平方的平均值,而“标准偏差”是方差的平方根。
“方差”给出了变化的平方度量,而“标准偏差”则提供了与原始数据更直接相关的度量。
因此,“标准偏差”通常更易于解释,因为它与原始数据(如像素值)在同一尺度上,而“方差”则提供了一个更抽象的变化程度指标。
应用:监测与分析
比如,如果要监测一天中某个景点的环境变化(例如光照、阴影或者天气条件等),可以拍摄一系列时间间隔的照片,然后应用“方差”模式渲染出一张图像,其中高亮部分显示了一天中变化最大的区域,如光照条件和阴影的变化。
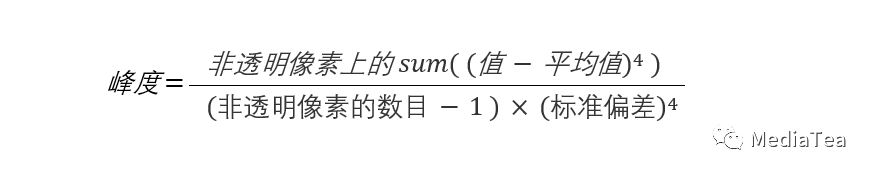
峰度
Kurtosis
“峰度”是一个统计学概念,用于描述概率分布的尾部厚度和峰值的尖锐程度。
在图像处理中,“峰度”可以用来分析一系列图像中像素值分布的形状特征。
高峰度值意味着像素值分布有更尖锐的峰和更厚的尾部,在最终渲染效果图像表现为较亮的区域。
在实际应用中,这可能意味着这些区域在一系列图像中经历了显著的变化,或者有异常值的出现。
低峰度则表明分布更平坦,在最终渲染效果图像表现为较暗的区域。
实际应用中,这通常意味着这些区域的像素值分布相对平缓,变化不太极端,没有太多的异常值。
应用:监测与分析
“标准偏差”和“方差”主要测量变化的幅度,而“峰度”则是测量变化形状的特征。同样适合于环境监测、天文观测或光学研究。
比如,在一晚上的不同时间拍摄了多张城市夜景的照片。通过应用“峰度”模式渲染出一张图像,该图像突出显示了一夜中光源分布变化最显著的区域,比如广告牌的闪烁、街灯的亮度变化或车辆的移动。
这样的分析对于理解和管理城市光污染具有重要价值。
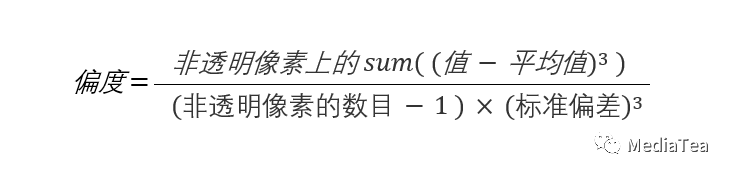
偏度
Skewness
“偏度”是衡量概率分布的不对称性的统计度量,用于分析一系列图像中像素值相对于其平均值的偏移趋势。
应用“偏度”模式渲染出的最终效果图像中,较亮的区域表示这些区域在图像序列中显示出正偏度,意味着这些区域的像素值分布倾向于高于平均值,即倾向于更亮的值。
这可能表明这些区域在图像序列中经历了向亮度值较高的变化。
较暗的区域则表示这些区域在图像序列中显示出负偏度,意味着这些区域的像素值分布倾向于低于平均值,即倾向于更暗的值。
这可能表明这些区域在图像序列中经历了向亮度值较低的变化。
应用:监测与分析
比如,你正在分析一系列记录云层变化的图像,“偏度”模式可以帮助识别云层的密集或稀疏变化。
例如,云层变得更密集(暗)或更稀疏(亮)的区域会在偏度分析中显现。
再比如,在观察一系列记录交通流量的图像时,“偏度”模式可以揭示车辆密度变化。
例如,交通量增加(暗)或减少(亮)的区域可能在偏度分析中凸显。
平均值
Mean
通过计算图像序列中每个像素位置的平均值来生成效果图像。
这种模式特别适用于减少图像噪声、平滑图像细节,以及创建一系列图像的代表性视觉效果。
应用一:降噪
比如,拍摄一系列夜景照片,每张照片中都有一定程度的噪点。
使用“平均值”模式处理这些照片,可以有效减少噪点,因为随机噪点在多张照片的平均处理中会被抵消。
应用二:模拟长时间曝光
非常适合于白天拍摄瀑布、晚上拍摄灯轨等题材,等同于拍摄单张的长时间曝光效果。
熵
Entropy
“熵”是一个来自信息论的概念,用于度量数据的不确定性或随机性。

其中,
值的概率 = 值的出现次数/非透明像素的总和
在图像处理中,“熵”模式可反映出像素值分布的复杂性和不确定性。
应用“熵”模式渲染出的最终效果图像中,较亮的区域表示这些区域在整个图像序列中具有较高的熵值,即更大的信息量或更高的复杂性。
这可能意味着这些区域在多张图像中经历了多变的变化,或者包含了丰富的细节和纹理。
而较暗的区域则表示这些区域在图像序列中具有较低的熵值,即较少的信息量或较低的复杂性。
这可能意味着这些区域在多数图像中较为统一或平坦,缺乏明显的变化或细节。
应用:监测与分析
在监测自然环境(如森林、湖泊等)的变化时,“熵”模式可以帮助识别那些变化最显著或信息量最大的区域。例如,它可以突出显示由于季节变化导致植被或水体状态发生变化的区域。
在进行城市景观的变化分析时,“熵”模式可以用来突出那些变化最频繁的区域,如繁忙的交通路段或不断变化的广告牌。
中间值
Median
通过提取图像序列中每个像素位置的中间值来生成效果图像。
这种模式特别适用于减少或消除图像噪声、去除异常像素,以及移除一系列图像中不连续出现的元素。
应用一:广场去人
“中间值”模式可以使得图像序列中不变的对象被保留,而变动的对象则被移除。
在拍摄人群或交通流量的场景时,使用“中间值”模式可以消除短暂通过的行人或车辆,得到较为静态和干净的场景图像。
应用二:去除噪点和偶发事件
在长时间的监控摄像或天文摄影中,可以使用“中间值”模式处理一系列图像,以去除偶发的噪点、飞机的光迹或流星。
总和
Summation
通过简单地将图像序列中每个像素位置的像素值累加来生成效果图像。
应用一:模拟长时间曝光
如果想模拟长时间曝光的效果,如捕捉车灯在夜间的轨迹,可以拍摄一系列短暂曝光的照片,然后使用“总和”模式将它们合并。这样,移动的光源(如车灯)在每张照片中的亮度将被累加,创造出流动光线的效果。
也常用于处理银河、星空等低照度环境摄影,可用来强化星星的亮度。
应用二:累积变化分析
在进行环境监测或其他需要评估随时间累积变化的研究时,使用“总和”模式可以可视化这些变化。
最大值
Maximum
通过提取图像序列中每个像素位置的最亮像素来生成效果图像。
“最大值”模式可以将不变的对象及变化的白(亮)色对象保留,而移除变化的黑(暗)色对象。
应用一:星轨摄影
在拍摄星轨时,通常需要在同一位置长时间拍摄多张照片。这些照片中,星星在天空中移动,形成一条条轨迹。使用“最大值”模式处理这些照片时,堆栈模式会在每个像素位置选择最亮的像素,从而组合出轨迹。
应用二:突出亮点
在进行城市夜景或烟花摄影时,使用“最大值”模式可以突出所有图像中出现的亮点,如车灯、街灯或烟花,从而创造出光亮繁华的视觉效果。
最小值
Minimum
通过提取图像序列中每个像素位置的最暗像素来生成效果图像。
“最小值”模式可以将图像序列中不变的对象和变化的黑(暗)色对象保留,而移除变化的白(亮)色对象。因此,此模式常用于去除图像序列中偶然或暂时出现的亮点。
应用一:移除水面反光
在拍摄水面或其他有反射的场景时,水面的闪光点可能因波动而在不同的照片中出现在不同的位置。如果想要获得一张没有反光的清晰水面图像,可以拍摄多张照片,然后应用“最小值”模式。
应用二:夜景或天文摄影
拍摄星空或夜景时,使用“最小值”模式可以帮助去除偶然的光污染或飞过的飞机和卫星的痕迹,因为这些亮点在大部分时间不会出现在同一位置。
无
None
不应用任何堆栈模式,撤除渲染效果,返回至常规智能对象。

“点赞有美意,赞赏是鼓励”

















 1717
1717

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









