







前言
本文汇总引脚歪斜检测、针脚歪斜检测、pin针歪斜检测的技术方案,供大家参考。
主要介绍两个示例,基于传统图像算法和机器学习的PIN针歪斜检测。
目录
方案1:基于传统图像算法的PIN针歪斜检测
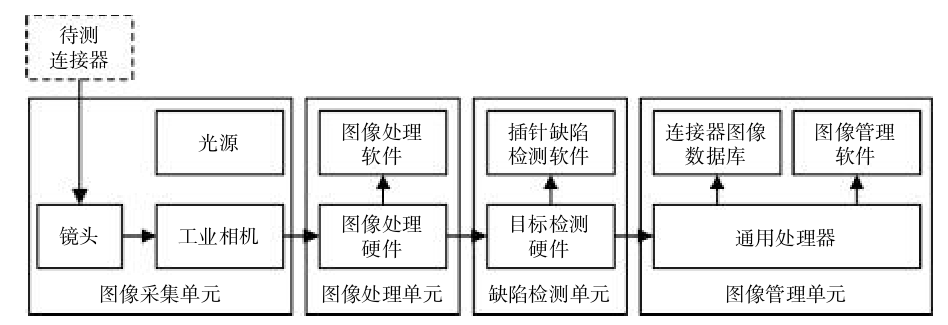
系统总体结构,如下图示所示:
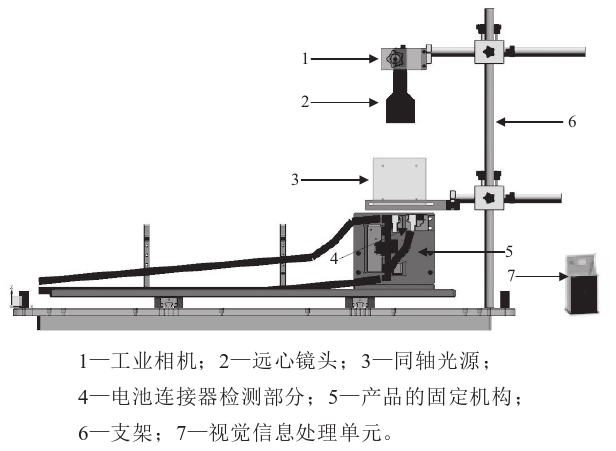
检测内容
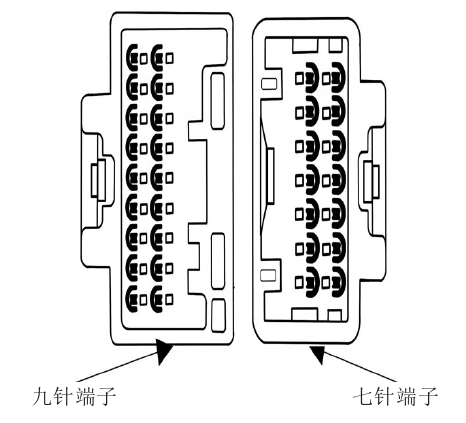
- 九针端子:内含18个针孔、15根插针;宽×高 为16.5 mm×25.2 mm;拱形重心到插针中心距离为 1.5 mm。
- 七针端子:内含14个针孔、10根插针; 宽×高为15.6 mm×20.8 mm;拱形重心到插针中心 距离为1.5 mm。
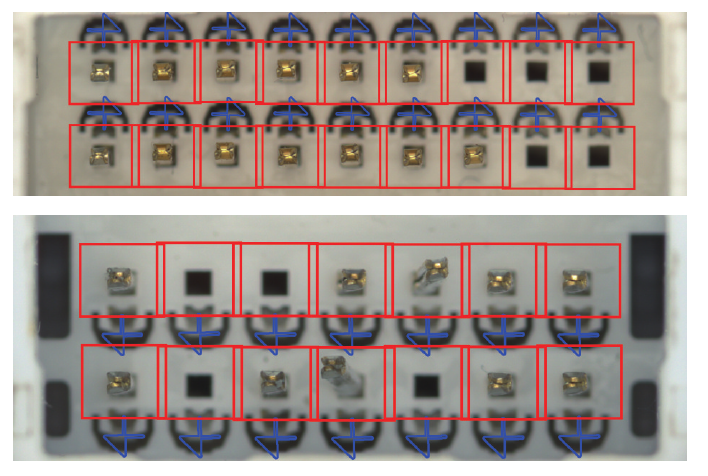
需检测的连接器端子内PIN针分布如下图所示
摘要内容:
- 传统PIN针歪斜检测主要依靠人工观察或利用插排等工件测试,存在检测效率低、精度无法满足工业要求的问题。
- 为解决这类问题,通过Halcon视觉开发软件和C#语言联合编程,设计基于机器视觉的连接器PIN针歪斜检测系统。
- 通过对连接器端子内部的视觉特征进行分析,并采用行列等比例缩放模板匹配确定基准点和定位PIN针区域,解决了传统形状模板匹配在目标尺寸发生变化后定位不准确的问题。
- 对定位的插针进行Sobel边缘检 测和形状转换确定其中心点,再计算基准点与中心点的欧式距离,得出插针偏移量。
- 实际应用结果表明,本文歪 斜检测系统精度为0.1 mm,通过率为98.61%,误判率为0,检测时间在1s以内,满足工业生产需求。
方案来源:

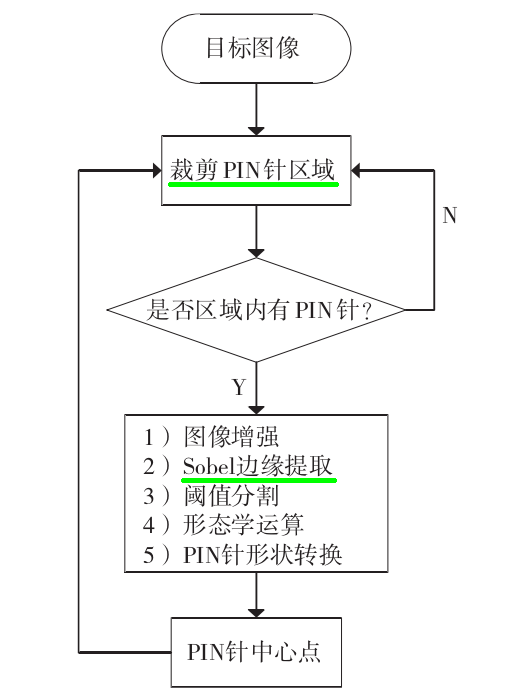
流程思路,如下图所示:
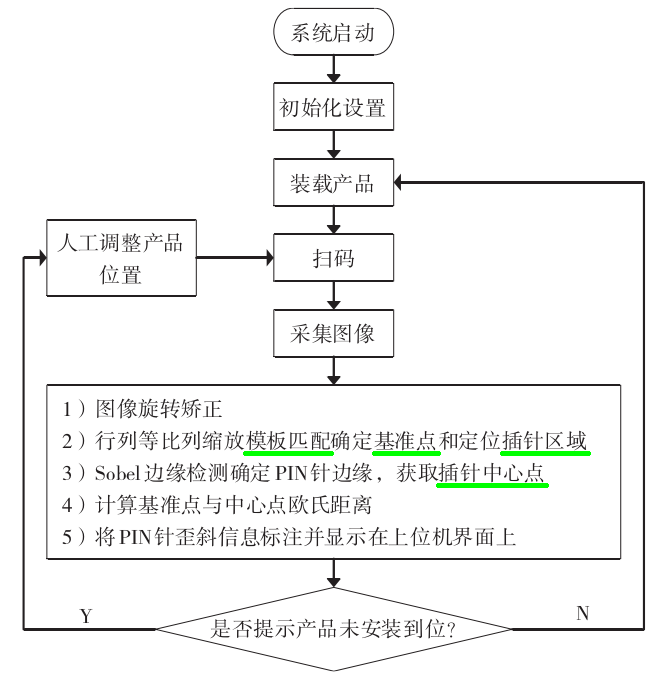
- 根据端子内部结构特点,采用行列等比例 缩放形状模板匹配定位插针区域和基准点,即插针穿插孔洞中心点;
- 然后,利用Sobel边缘检测提取 插针边缘并进行形状转化,获取PIN针中心点;
- 最后,求基准点与插针中心点的欧式距离,从而判断PIN针是否歪斜。
1)关键内容——图像旋转与倾斜矫正

- 若直接进行歪斜检测,一是受人工安装或机构自身影响,导致端子呈倾斜状态,检测效果不佳;
- 二是若将检测结果标注在对应插针上,受观察习惯影响,使员工不便观察。
- 为方便观察,采用基于双线性插值的图像旋转算法将图像顺时针旋转90°。
- 为解决端子倾斜问题,采用阈值分割提取端子,然后利用仿射旋转变换将端 子旋转至水平。
效果如下图所示

2)关键内容——行列等比例缩放模板匹配
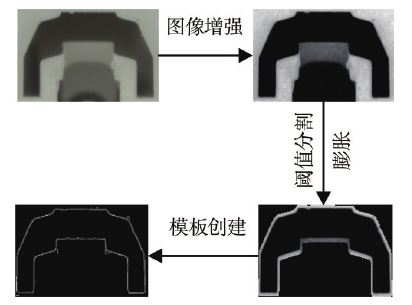
创建模型流程
- 首先,需要对焦于拱形区域直至清晰;
- 然后,进行预处理如:强化、阈值分割、膨胀等提取模板图像;
- 最后,创建形状模板。
模板匹配
- 将形状模板与待匹配对象的相似度与设定阈值进行比较,若大于阈值则匹配成功,且相似度越高则匹配对象与形状模板越吻合,反之匹配失败。
- 模板匹配过程是目标图像利用模板参考点(一般为模板重心)和边缘点的相对位置关系,得出一系列点及其梯度向量,然后计算相似度。
模板匹配与定位效果图:
3)关键内容——边缘检测与PIN针偏移量获取
- 检测系统对焦于PIN针尖端;
- 尖端边缘灰度值突变,其周围平滑。
- 根据该特点,对插针区域图像增强,然后利用Sobel边缘检测获取顶端边缘信息。

PIN针中心点定位流程

判断出大于0.1 mm的歪斜插针,检测效果如下图示所示:
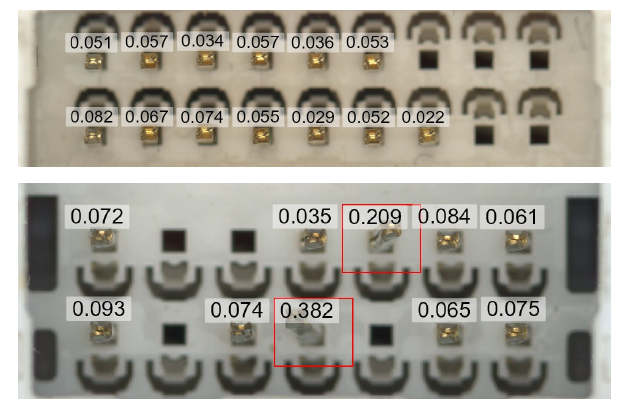
注意:该视觉采集设备对焦于PIN针尖端,无法清晰采集插针底部和中部,导致无法检测弯曲的或呈螺旋状且不歪斜的插针。
方案2:基于机器学习的连接器缩针弯针检测系统研究
基于机器学习的电连接器缺陷检测针对电连接器插针是否异常。
- 检测系统需要完成电连接器图像生成、采集、再到图像处理、插针异常情况识别,
- 最后将异常情况标记到图像上,并进行图像保存。
系统流程,如下图所示
方案来源:
镜头选型
- 镜头采用Basler Premium C口镜头,带有25 mm定焦距,光圈范围F2.2-F22,分辨率为500万像素。
- 这款Basler镜头属于Premium产品线,分辨率高,失真度低以及暗角极小,成像质量出众,
- 这些特点让Basler Premium镜头非常适用于分辨率极高的相机,助力分析细微的结构。

相机选型
- 相机是直接进行图像采集的部分,输出彩色图像。
- 为保证成像质量,采用Basler a2A2590-60umBAS USB3.0相机,配有Sony IMX334ROI CMOS芯片,
- 帧速率达60 fps,分辨率达2592x1944 pixel,能满足数据高速传输的要求。
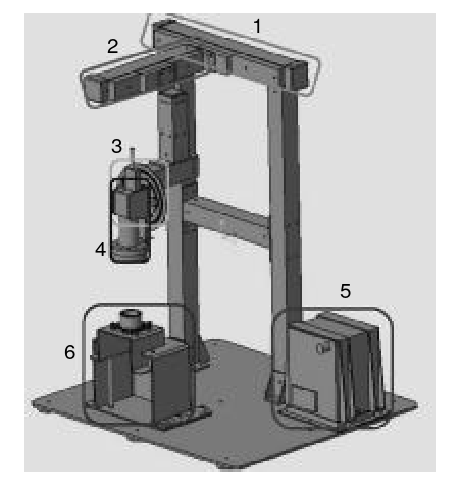
机械结构
- 横向滑档模块;
- 纵向滑动模块;
- 相机角度调节模块;
- 相机和补光灯固定模块;
- 补光灯供电调节模块;
- 零件固定调节模块。
算法流程:
- 首先通过调整各种类型的连接器,并调节工装台的拍摄角度,对于所收集得到的图像开始完成了图像校准、灰度化和二值化等的预处理步骤。
- 然后将预处理后的图片进行针脚的定位,和类别判断。
- 最后进行缺陷算法的检测。
关键内容1——图像预处理
- 图像由灰度相机采集后,由计算机进行存储和处理。
- 灰度图像在检测中的效率更高,因此首先对采集的RGB(红、绿、蓝)彩色源图像作灰度化处理。
流程包括:
- 图像尺度的调整,图像由原始尺寸调整为统一的2000×800;
- 图像灰度标准化:距离变换是对二值图像的一种操作运算,它将一幅二值图像转换为一幅灰度图像,在这幅图像中,每个像素的灰度值是该像素与距其最近的背景间的距离。将所有灰度值标准化到[-0.5, 0.5];
- 图像边缘扩增,在图像边缘添加0像素,将图像尺寸扩增为32的倍数;
- 图像数据形式转换,将图像数据形式转换为张量的格式。
关键内容2——针脚定位和类别判断
- 算法最终输出针脚的位置信息和类别,其中位置信息指针脚在图像中的外接矩形框,具体包含矩形框的左上角坐标和长宽。
- 类别指正常、倾斜和缩短3种类型。
- 根据每个针脚的位置信息和类别可以唯一确定针脚在图像中的位置以及类别。
这里可以用常规的目标检测算法即可,比如yolov5、yolov8、FasterRCNN、NanoNet、FCOS等。
检测效果:
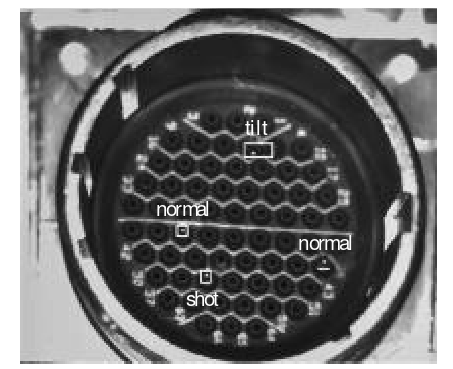
标记为normal的是正常针脚,标记为tilt的是缺陷针脚,shot是指针脚缩短。
分享完成,本文会持续更新~
后续分析更多引脚歪斜检测、针脚歪斜检测、pin针歪斜检测的技术方案。



















 1893
1893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











