







文章目录
安装anaconda
1.下载并安装anaconda
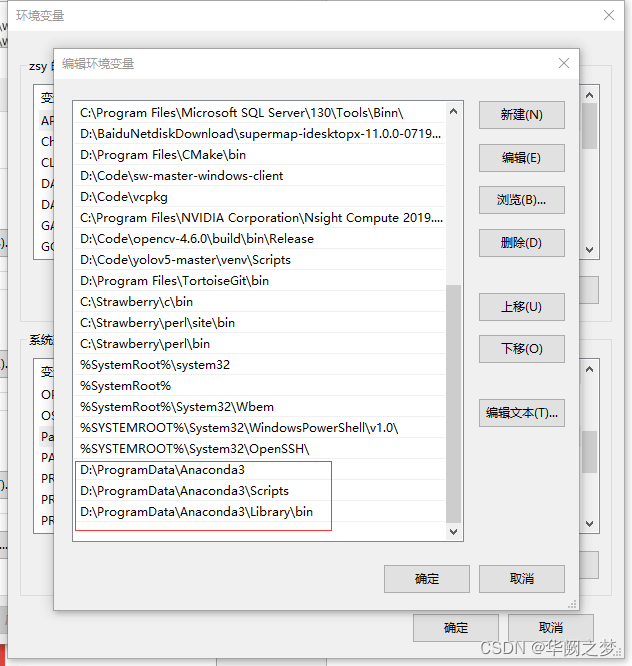
2.配置环境变量
//进入主环境
conda activate base
如果不行于是,尝试 conda init ,重置conda ,关闭shell,重新打开并尝试conda activate base ,成功启动base环境!
//创建环境
conda create -n env1
//删除环境
conda remove --name env1 --all
//激活环境
conda activate env1
//安装包
conda create -n env1 python=3.7
//安装jupyter安装
pip install jupyter
启动 Jupyter notebook
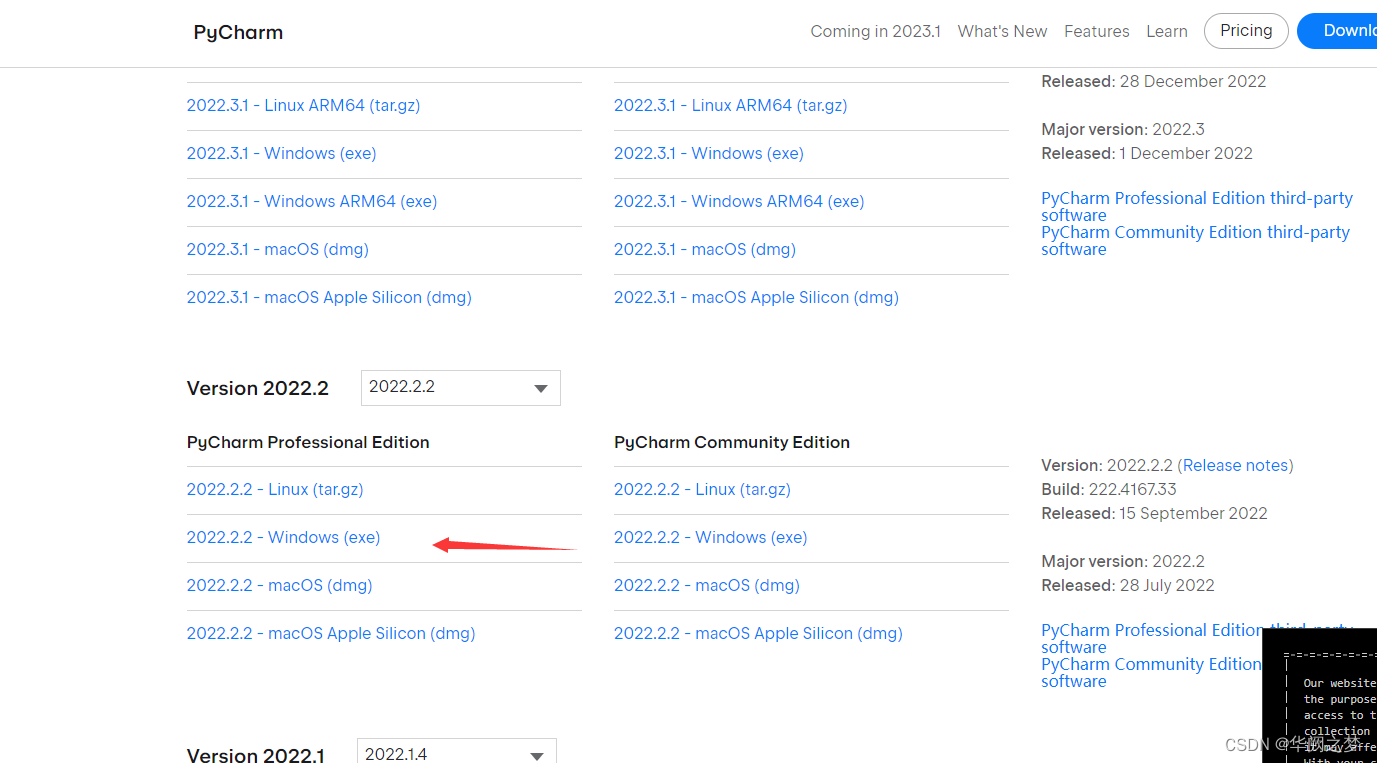
安装pycharm
安装cuda
打开cmd,输入 :nvidia-smi
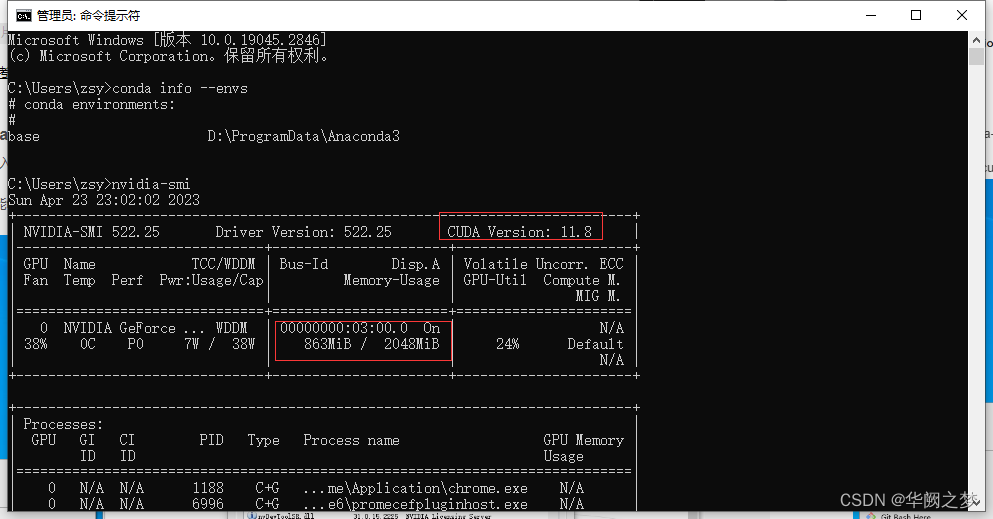
可以看到红框里的是电脑支持的最高版本的cuda,我们在官网进行下载时,下载该版本及以下的即可(建议下载该版本以下)

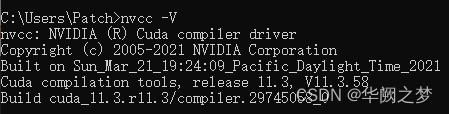
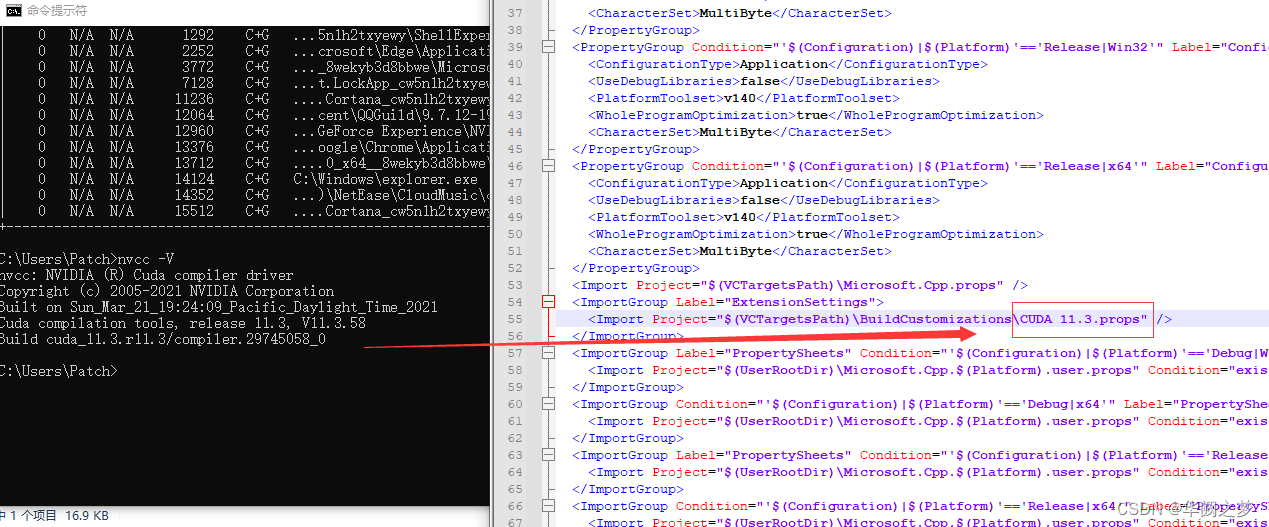
//校验cuda是否安装成功
nvcc -V
CUDA v10.0的卸载
添加清华镜像源
直接打开cmd输入一下命令
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud//pytorch/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge/
conda config --set show_channel_urls yes
查看本地镜像源
conda config --show channels
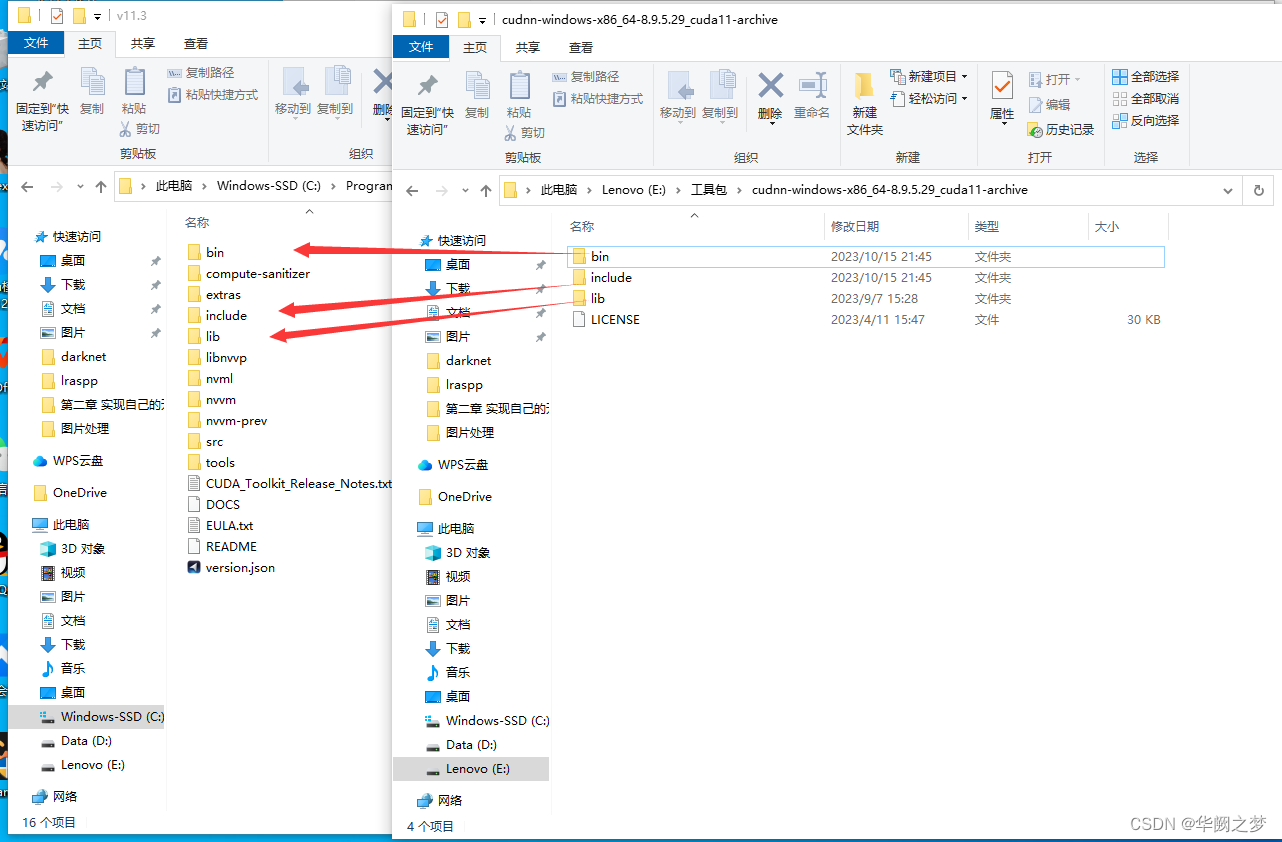
安装CUDNN
安装pytorch
//查看已有的环境
conda info --envs
//创建环境
conda create -n env1
//激活环境
conda activate env1
查看安装版本
一定要根据cuda版本号安装pytorch版本,不然后续崩溃死你。
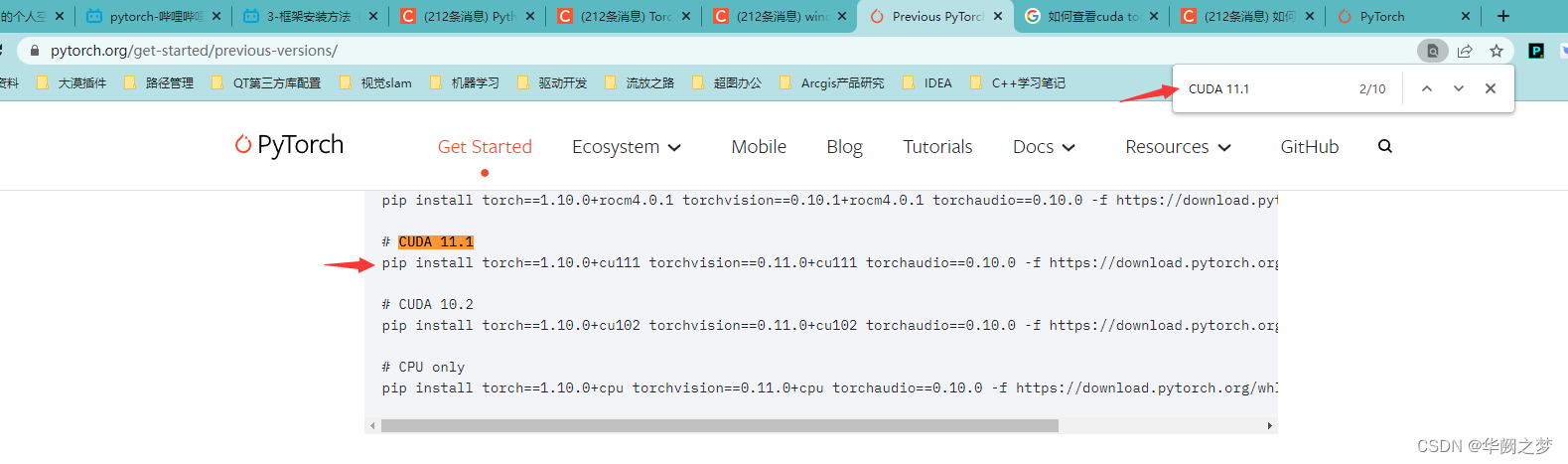
注意:这里我尝试了很多个才发现下面这个可以安装,建议安装不上就多环一个或者自己想办法离线安装百度
pip install torch==1.12.1+cu113 torchvision==0.13.1+cu113 torchaudio==0.12.1 --extra-index-url https://download.pytorch.org/whl/cu113
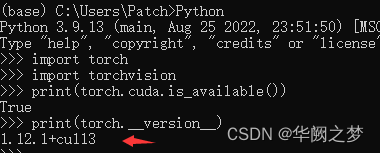
//一下代码逐行输入校验当前gpu环境是否可用
conda activate base
Python
import torch
import torchvision
print(torch.cuda.is_available())
print(torch.__version__)
//卸载Pytorch
pip uninstall torch
//安装numpy
conda install numpy
//安装cv
pip install opencv-python
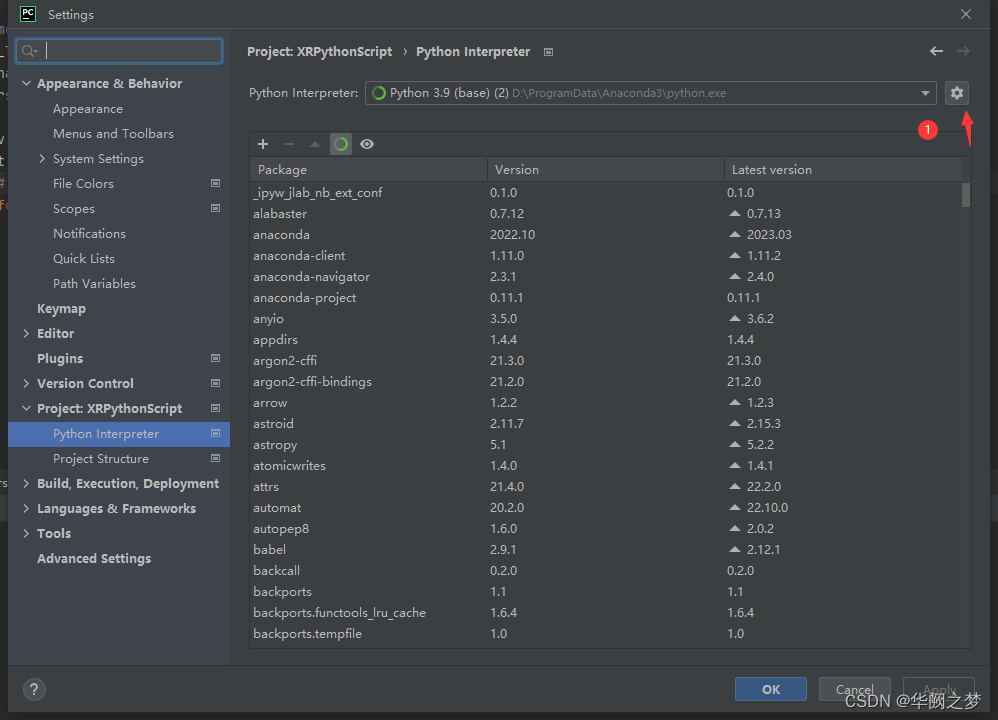
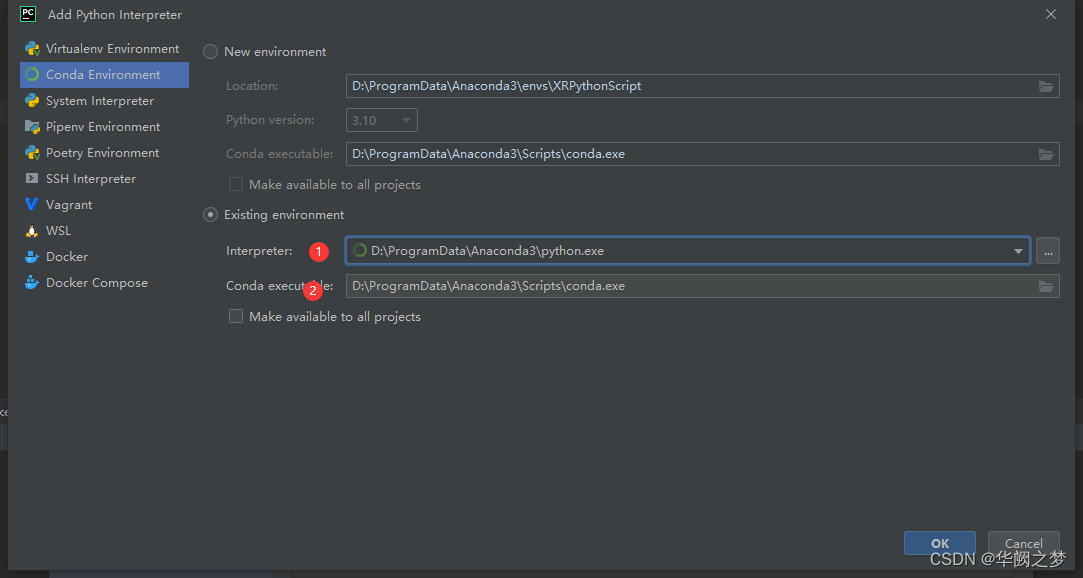
设置PyCharm使用Anaconda的环境
解决pytorch在pycharm不能自动补全代码方法
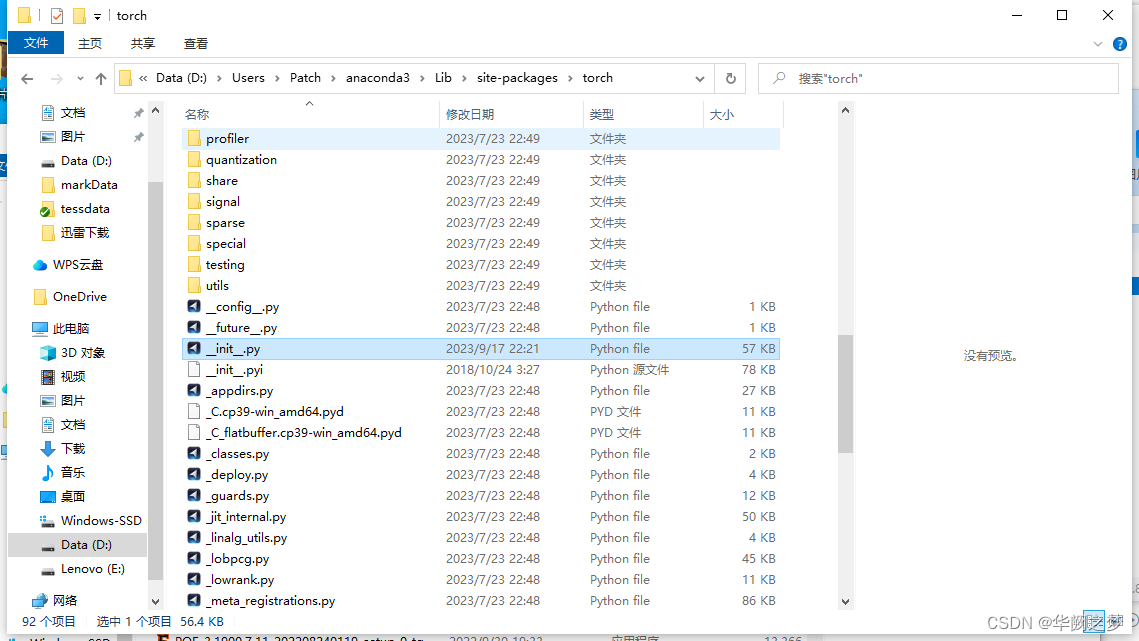
方法很简单,就是将上文提到的__init__.pyi文件复制到torch文件夹下。
init.pyi 文件下载链接:https://files.cnblogs.com/files/FengZeng666/pyi.zip
对于我的项目具体的路径是D:\Users\Patch\anaconda3\Lib\site-packages\torch,注意不要复制错位置。参考图如下:
参考文章一
参考文章二
示例演示
# step1 导入所需要的包
import torch
import torch.nn as nn
import torchvision.datasets as dsets
import torchvision.transforms as transforms
import torch.optim as optim
from torch.utils.data import DataLoader
# step2 定义device
device = "cuda" if torch.cuda.is_available() else "cpu"
# step3 参数设置(学习率,训练轮数,批大小)
learning_rate = 0.1
training_epochs = 10
batch_size = 16
# step4 Dataset & DataLoader设置数据集和数据加载器
trans = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor()
])
# DataSet设置数据集
cifar10_train = dsets.CIFAR10(root="cifar10_data", train=True, transform=trans, download=True)
cifar10_test = dsets.CIFAR10(root="cifar10_data", train=False, transform=trans, download=True)
# dataloader设置数据加载器
train_loader = DataLoader(dataset=cifar10_train, batch_size=batch_size, shuffle=True, drop_last=True)
test_loader = DataLoader(dataset=cifar10_test, batch_size=batch_size, shuffle=False, drop_last=False)
# step5 model定义层
def make_layers(cfg):
in_channel = 32
layers = []
for v in cfg:
t, out_channel, n, stride = v
# 编写深度可分离卷积DSC layer
for i in range(n):
if i != 0:
stride = 1
conv_pointwise1 = nn.Conv2d(in_channel,
in_channel * t,
kernel_size=1,
stride=1,
padding=0)
conv_depthwise = nn.Conv2d(in_channel * t,
in_channel * t,
kernel_size=3,
groups=in_channel * t,
stride=stride,
padding=1)
conv_pointwise2 = nn.Conv2d(in_channel * t,
out_channel,
kernel_size=1,
stride=1,
padding=0)
# 增加层之后的批量标准化和激活
layers.append([conv_pointwise1, nn.BatchNorm2d(in_channel * t), nn.ReLU6(),
conv_depthwise, nn.BatchNorm2d(in_channel * t), nn.ReLU6(),
conv_pointwise2, nn.BatchNorm2d(out_channel)])
in_channel = out_channel
return layers
# 定义网络
class Mobilenet(nn.Module):
def __init__(self, features, stride_list, num_classes=10):
super(Mobilenet, self).__init__()
# conv2d
self.layer1 = nn.Sequential(
nn.Conv2d(3, 32, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(32),
)
# 第一层卷积输入通道为3,输出通道为32,卷积核为3,步长为2,填充为1
# bottleneck
self.bottle_necks = []
for layer in features:
self.bottle_necks.append(nn.Sequential(*layer).cuda())
# 论文中共17个bottleneck
# last conv2d
self.layer2 = nn.Sequential(
nn.Conv2d(320, 1280, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(1280),
nn.AvgPool2d(7, 7),
)
# 论文中的最后一个卷积和一个平均池化
# classfier
self.fc = nn.Linear(1280, num_classes)
def forward(self, x):
# layer1
out = self.layer1(x)
# bottlr_neck
for i in range(len(self.bottle_necks)):
new = self.bottle_necks[i](out)
if stride_list[i] == 1: # skip connection
if out.shape[1] != new.shape[1]:
out = Downsample(out.shape[1], new.shape[1]).cuda()(out)
new += out
out = new
# layer2
# print("size",out.size())
out = self.layer2(out)
# fc
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
# 当stride=2时,执行下采样
class Downsample(nn.Module):
def __init__(self, in_channel, out_channel):
super(Downsample, self).__init__()
self.layer = nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=1),
nn.BatchNorm2d(out_channel),
)
def forward(self, x):
out = self.layer(x)
return out
# expansion factor扩展因子t,输出通道数c,重复次数n,步长s
cfg = {'mobilenetv2': [(1, 16, 1, 1),
(6, 24, 2, 2),
(6, 32, 3, 2),
(6, 64, 4, 2),
(6, 96, 3, 1),
(6, 160, 3, 2),
(6, 320, 1, 1)]}
bottleneck = make_layers(cfg["mobilenetv2"])
stride_list = [1,
2, 1,
2, 1, 1,
2, 1, 1, 1,
1, 1, 1,
2, 1, 1,
1]
model = Mobilenet(bottleneck, stride_list, num_classes=10).to(device)
model.cuda()
target = torch.Tensor(2, 3, 224, 224).to(device)
# 不能删掉batch_size
after_target = model(target)
print(after_target.shape)
print(after_target)
# step6 optim&loss优化器和函数
criterion = nn.CrossEntropyLoss().to(device)
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
# step7 train训练
model.train()
iteration = len(train_loader)
for epoch in range(training_epochs):
loss = 0.0
acc_correct = 0.0
for idx, sample in enumerate(train_loader):
optimizer.zero_grad()
X, Y = sample
X = X.to(device)
Y = Y.to(device)
# foeward,backward,optim
hypothesis = model(X)
cost = criterion(hypothesis, Y)
cost.backward()
optimizer.step()
# calculate
loss += cost.item()
correct = (torch.argmax(hypothesis, dim=1) == Y).float()
acc_correct += correct.sum()
acc_correct /= (batch_size * iteration)
loss /= iteration
print("[Epoch:{:04d}],loss:{:.2f},acc:{:.2f}%".format(epoch, loss, acc_correct * 100))
# step8 test测试
with torch.no_grad():
model.eval()
accuracy = 0
loss = 0
for idx, sample in enumerate(test_loader):
X, Y = sample
X = X.to(device)
Y = Y.to(device)
hypothesis = model(X)
cost = criterion(hypothesis, Y)
# calculate
loss += cost.item()
accuracy = (torch.argmax(hypothesis, dim=1) == Y).sum().float()
acc_correct /= len(test_loader)
accuracy /= (batch_size * len(test_loader))
print("[test]loss:{:.4f},acc:{:.4f}%".format(loss / 1000, acc_correct * 1000))
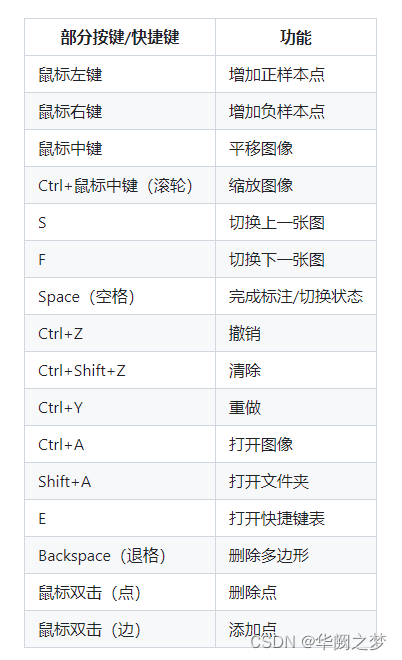
安装EISeg
1.1创建conda虚拟环境(建议)
为了不影响其他python环境,建议新建一个环境。(不想新建可以跳过)
这里以创建一个名为eiseg_env,python版本为3.8的环境为例:
conda create -n eiseg_env python=3.8
conda activate eiseg_env
pip install paddlepaddle -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install eiseg -i https://pypi.tuna.tsinghua.edu.cn/simple
eiseg
pip uninstall opencv-python
pip install --user opencv-python --upgrade -i https://pypi.tuna.tsinghua.edu.cn/simple # 更新opencv库

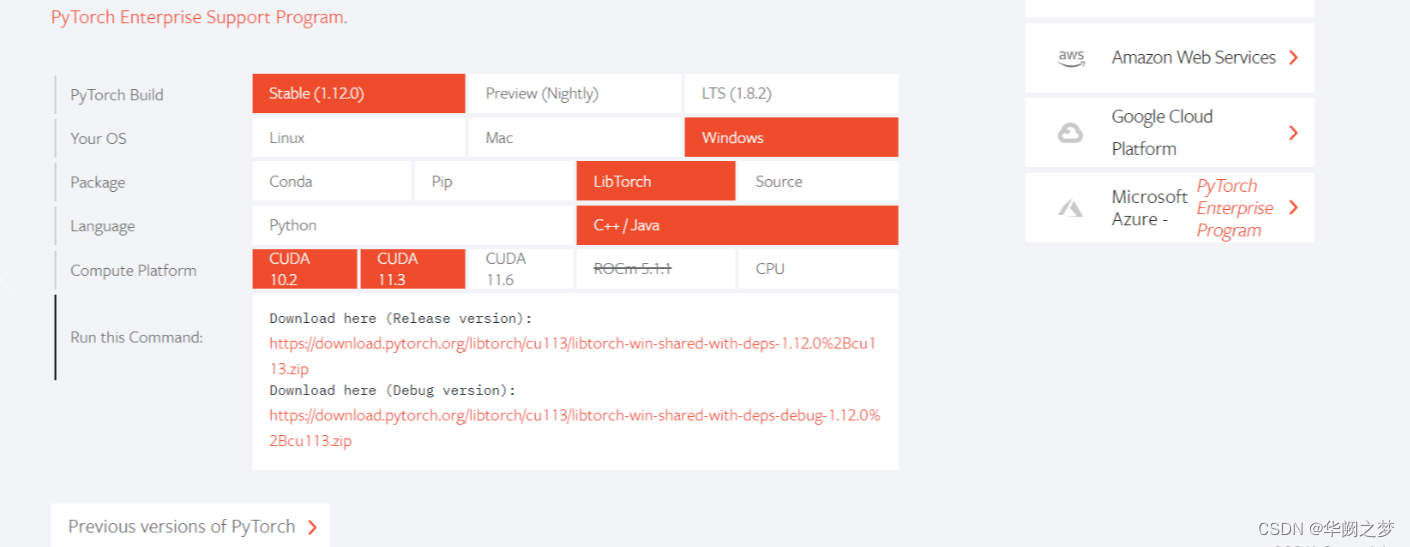
libtorch的C++部署
libtorch各版本
1.查看自己需要的torch 和cuda版本号
https://download.pytorch.org/libtorch/cu113/libtorch-win-shared-with-deps-1.12.1%2Bcu113.zip
https://download.pytorch.org/libtorch/cu113/libtorch-win-shared-with-deps-debug-1.12.1%2Bcu113.zip
https://download.pytorch.org/libtorch/cpu/libtorch-win-shared-with-deps-debug-1.12.1%2Bcpu.zip
https://download.pytorch.org/libtorch/cpu/libtorch-win-shared-with-deps-1.12.1%2Bcpu.zip
环境搭建地址
环境搭建参考地址二
libtorch学习地址
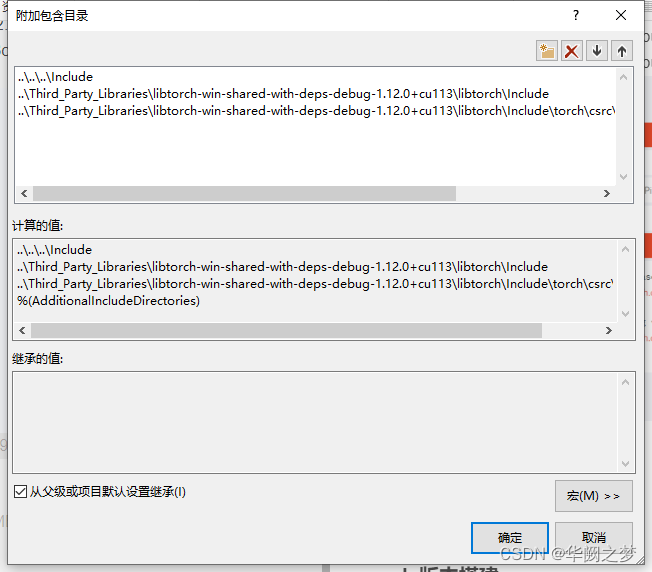
一、修改头文件
..\..\..\Include
..\Third_Party_Libraries\libtorch-win-shared-with-deps-debug-1.12.0+cu113\libtorch\Include
..\Third_Party_Libraries\libtorch-win-shared-with-deps-debug-1.12.0+cu113\libtorch\Include\torch\csrc\api\include
二、依赖库
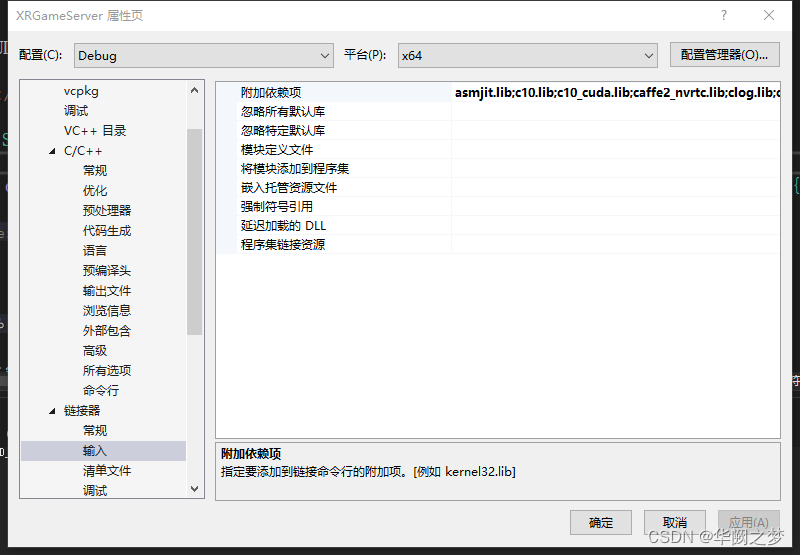
三、支持cuda编译
asmjit.lib;c10.lib;c10_cuda.lib;caffe2_nvrtc.lib;clog.lib;cpuinfo.lib;dnnl.lib;fbgemm.lib;kineto.lib;libprotobufd.lib;libprotobuf-lited.lib;libprotocd.lib;pthreadpool.lib;torch.lib;torch_cpu.lib;torch_cuda.lib;torch_cuda_cpp.lib;torch_cuda_cu.lib;XNNPACK.lib;%(AdditionalDependencies)
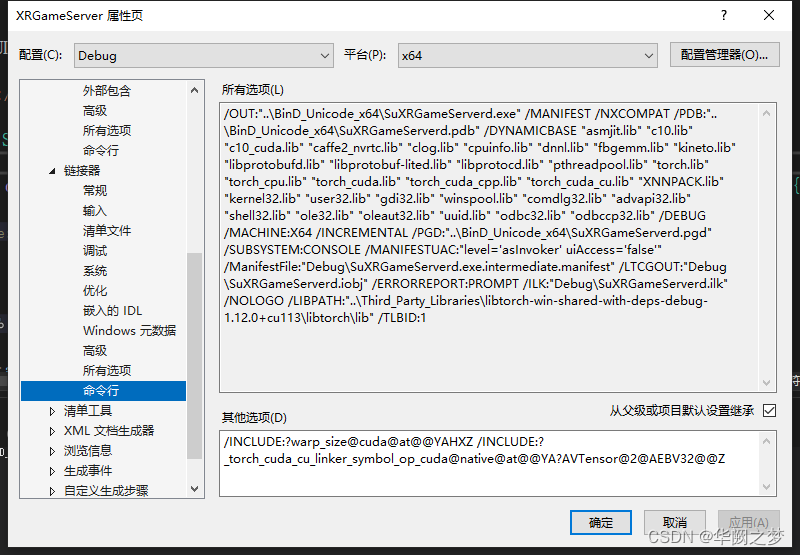
debug和release都必须设置这个不然cudu不可用
/INCLUDE:?warp_size@cuda@at@@YAHXZ /INCLUDE:?_torch_cuda_cu_linker_symbol_op_cuda@native@at@@YA?AVTensor@2@AEBV32@@Z
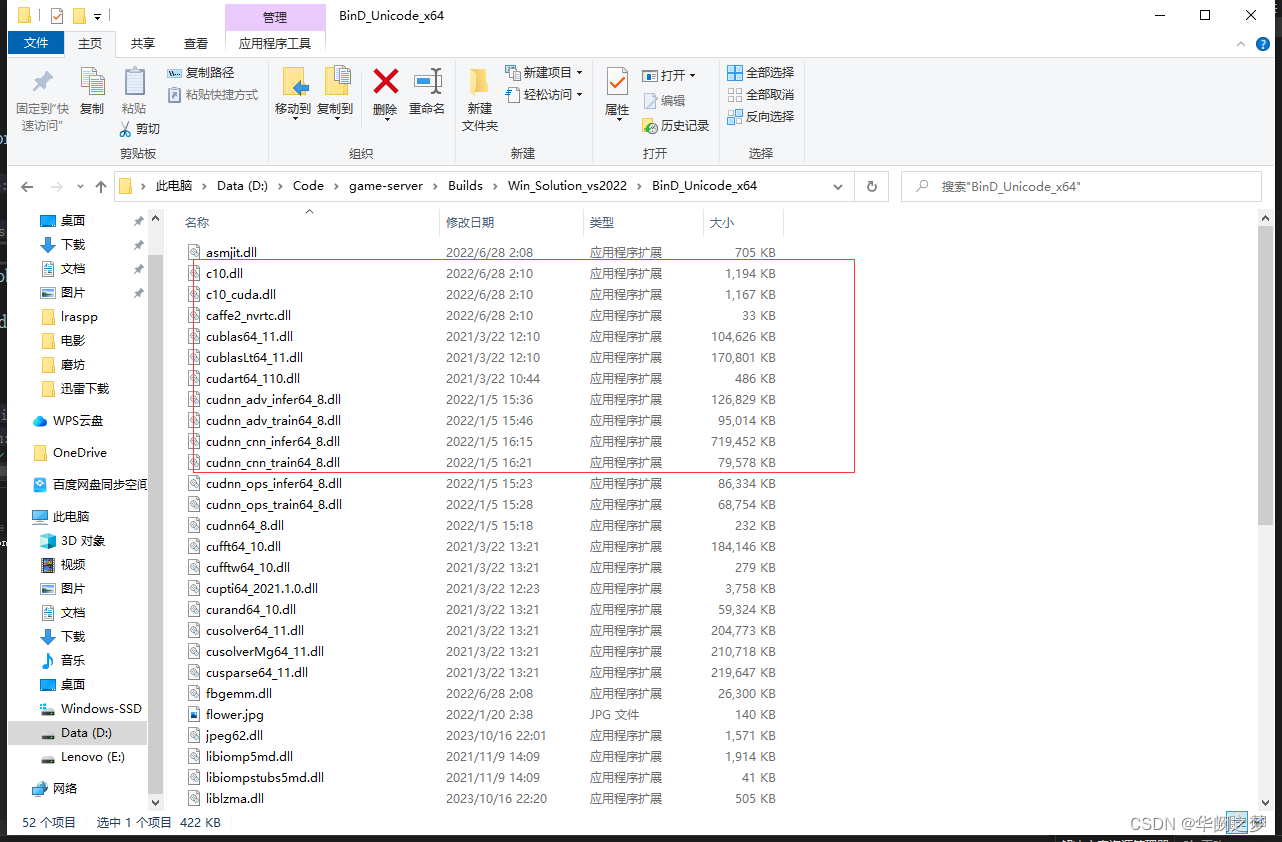
四、第三方dll迁移到输出目录
darknet框架
cuda版本搭建
安装参考博文
1.下载源码
https://github.com/AlexeyAB/darknet/archive/master.zip
添加链接描述
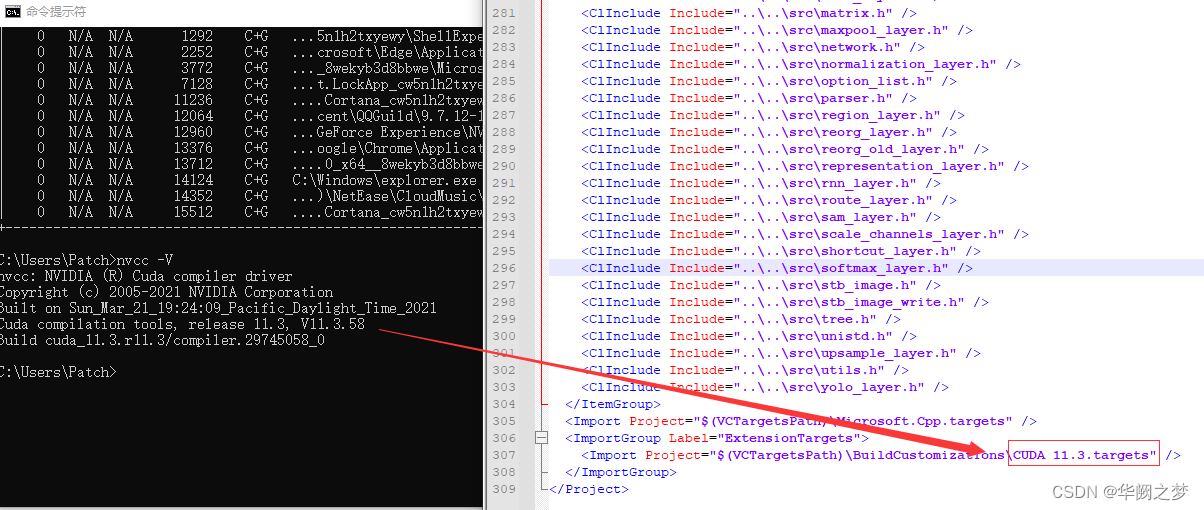
vs编译会报错
1>nvcc fatal : Unsupported gpu architecture ‘compute_30’
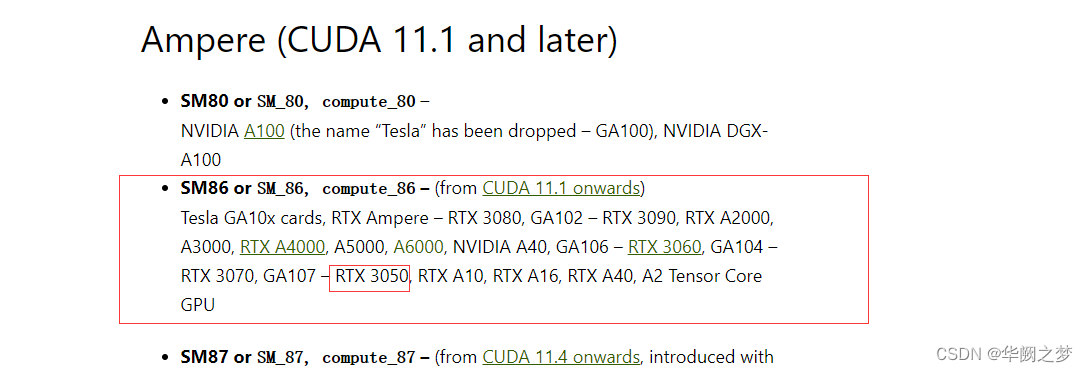
http://arnon.dk/matching-sm-architectures-arch-and-gencode-for-various-nvidia-cards/
通过上面的链接可以发现,CUDA11已经不支持compute_30了!
https://arnon.dk/matching-sm-architectures-arch-and-gencode-for-various-nvidia-cards/
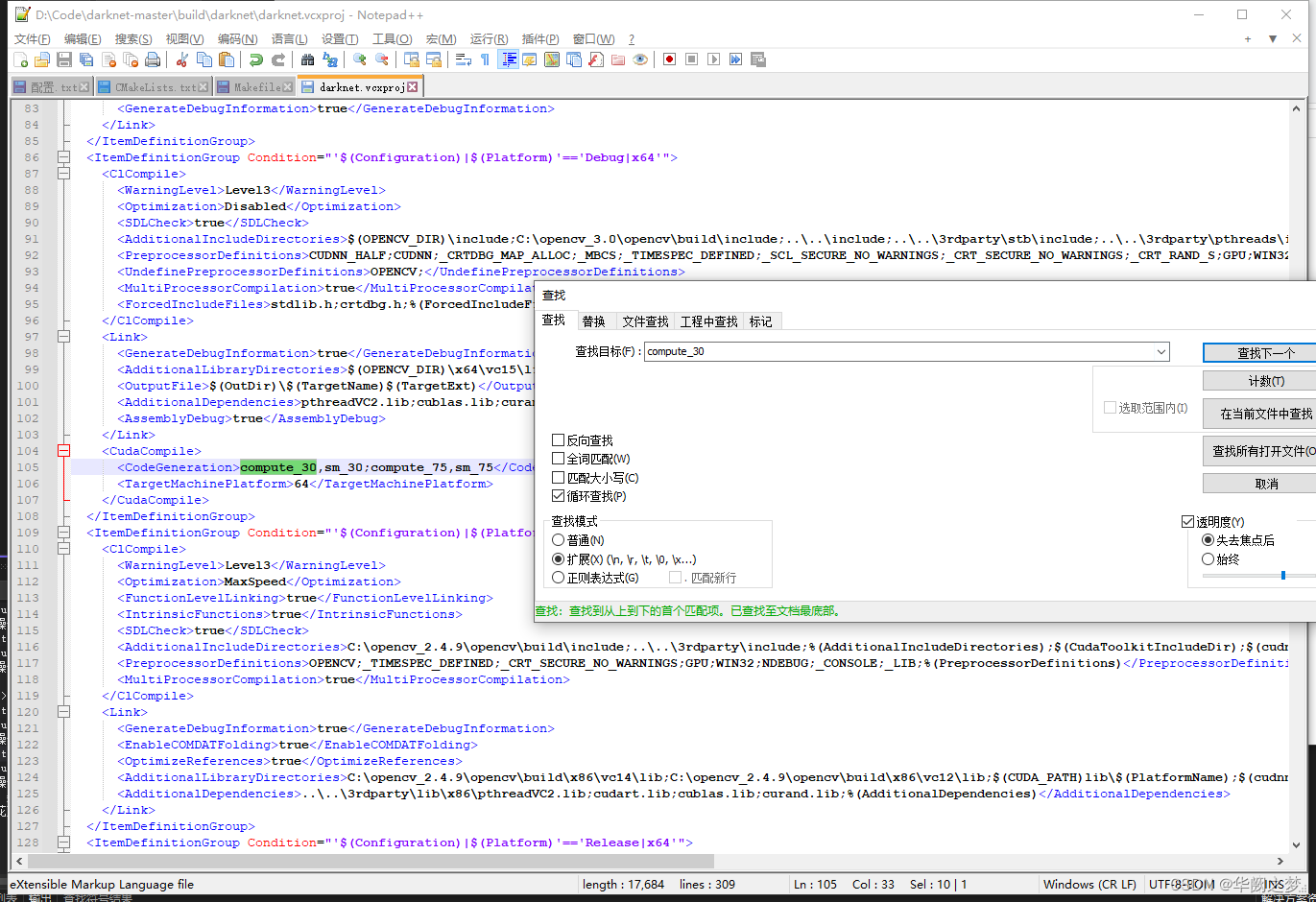
找到cuda支持编译的命令并修改
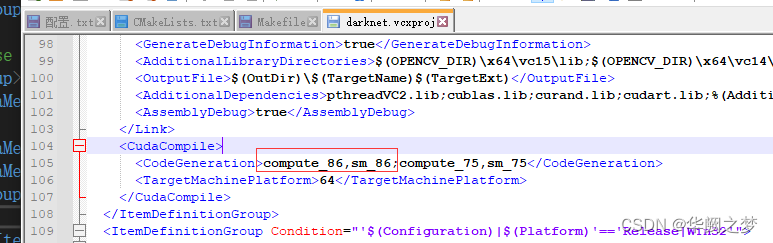
所以:
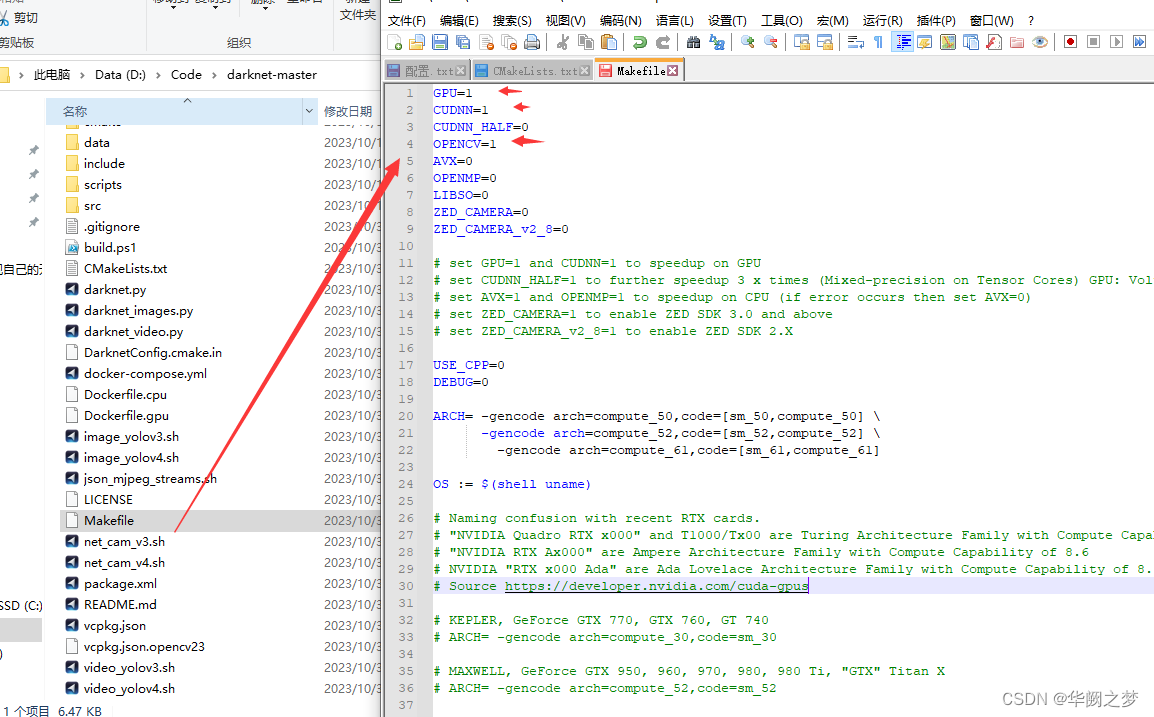
修改src/darknet_ros/darknet/Makefile和src/darknet_ros/darknet_ros/CMakeList.txt
修改方式:将其中包含compute_30的行进行注释
再次编译就行了!
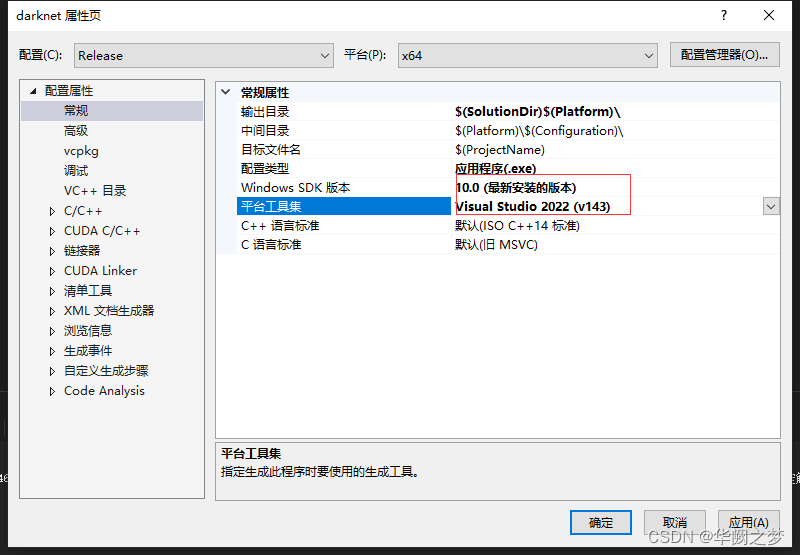
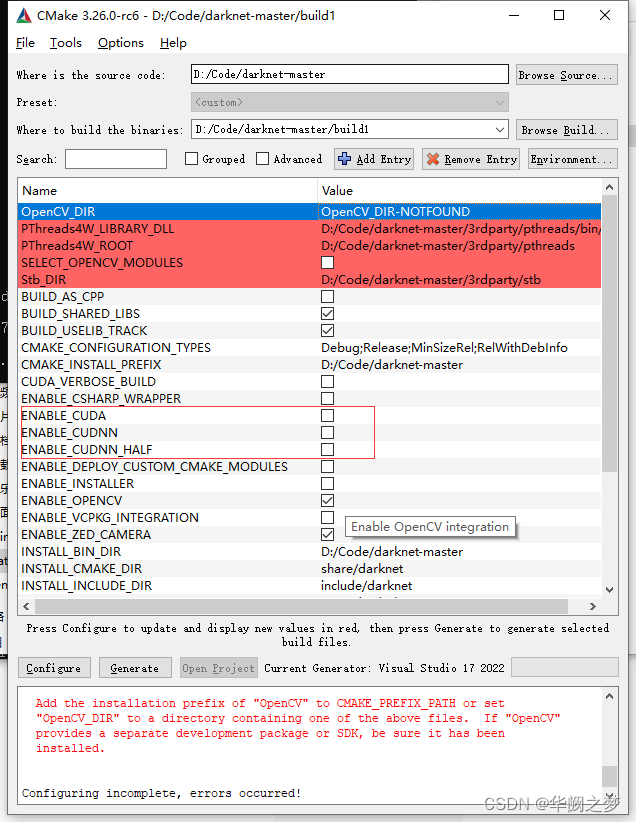
Visua
l Studio 2019打开YOLOv4项目
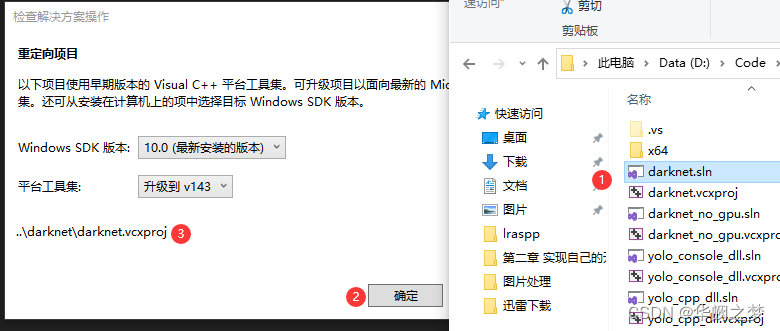
2.可选:如果需要配置cuda
CMAME_CUDA_COMPLER
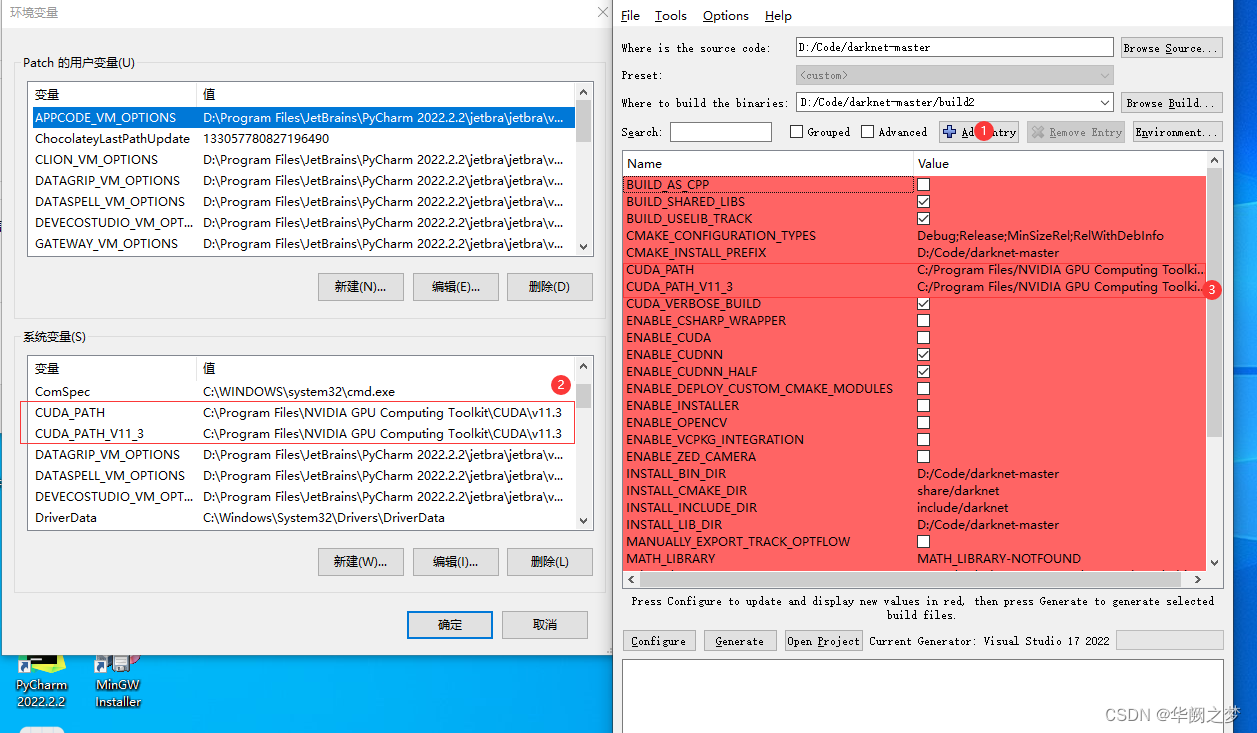
cpu版本搭建
vcpkg install opencv:x64-windows
如下全部去掉















 1456
1456











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









