






相比双系统最大的缺点:没法直接使用显卡
全局命令和设置/备忘
sudo nautilus 文件删不掉就用这个
https://zhuanlan.zhihu.com/p/94262900 提高虚拟机运行速度
仿真文件备忘,每换一个仿真,就要把catkin_ws中的build,devel文件夹和src里面的cmakelist删除后再编译,不然会相互影响!!!!!22年6月23日花了好久才发现的
安装 ROS
https://blog.csdn.net/sinat_34130812/article/details/81666728
bug1: sudo apt-get install ros-melodic-desktop-full 时有些包无法下载,解决方法: https://blog.csdn.net/qq_41938005/article/details/122957621
bug2: rosdep update 时超时,解决方法:“试了很多办法,只有这个管用,第一步,sudo apt-get install python3-pip;第二步,sudo pip3 install rosdepc;然后 sudo rosdepc init;最后rosdepc update,完美解决。”
安装 Rotors
在官网自己下载zip解压就行,用catkin_make
bug1 找不到ros_msg: https://download.csdn.net/download/qq_16775293/13126668?spm=1001.2101.3001.6661.1&utm_medium=distribute.pc_relevant_t0.none-task-download-2%7Edefault%7ECTRLIST%7EPaid-1-13126668-blog-123894015.pc_relevant_default&depth_1-utm_source=distribute.pc_relevant_t0.none-task-download-2%7Edefault%7ECTRLIST%7EPaid-1-13126668-blog-123894015.pc_relevant_default&utm_relevant_index=1
bug2 cmake could not find octomap_ros when run catkin_make : https://answers.ros.org/question/248242/cmake-could-not-find-octomap_ros-when-run-catkin_make/
bug3 Failed to find glog: https://blog.csdn.net/CAIYUNFREEDOM/article/details/104903050
可以用catkin_make编译
安装 Ceres
https://blog.csdn.net/JeSuisDavid/article/details/121146859
http://www.ceres-solver.org/installation.html#linux
1安装 Gazebo
用ROS自带的Gazebo9就行,下面是一些运行的bug
bug1([Err]Error in REST request) https://blog.csdn.net/qq_39531155/article/details/114678795
bug2(VMware: vmw_ioctl_command error 无效的参数.) export SVGA_VGPU10=0 写到bashrc里面,然后source,不要关闭图形硬件加速,会变卡
bug3 地面影子闪烁:把world文件里的sun去掉,要光源进去以后自己加就行
安装 Matlab
1.在交大软件中心下载就行,把得到的 ISO 文件挂载在桌面上,打开挂载的盘进行安装。注意不要直接双击 ISO 文件
2. ./install
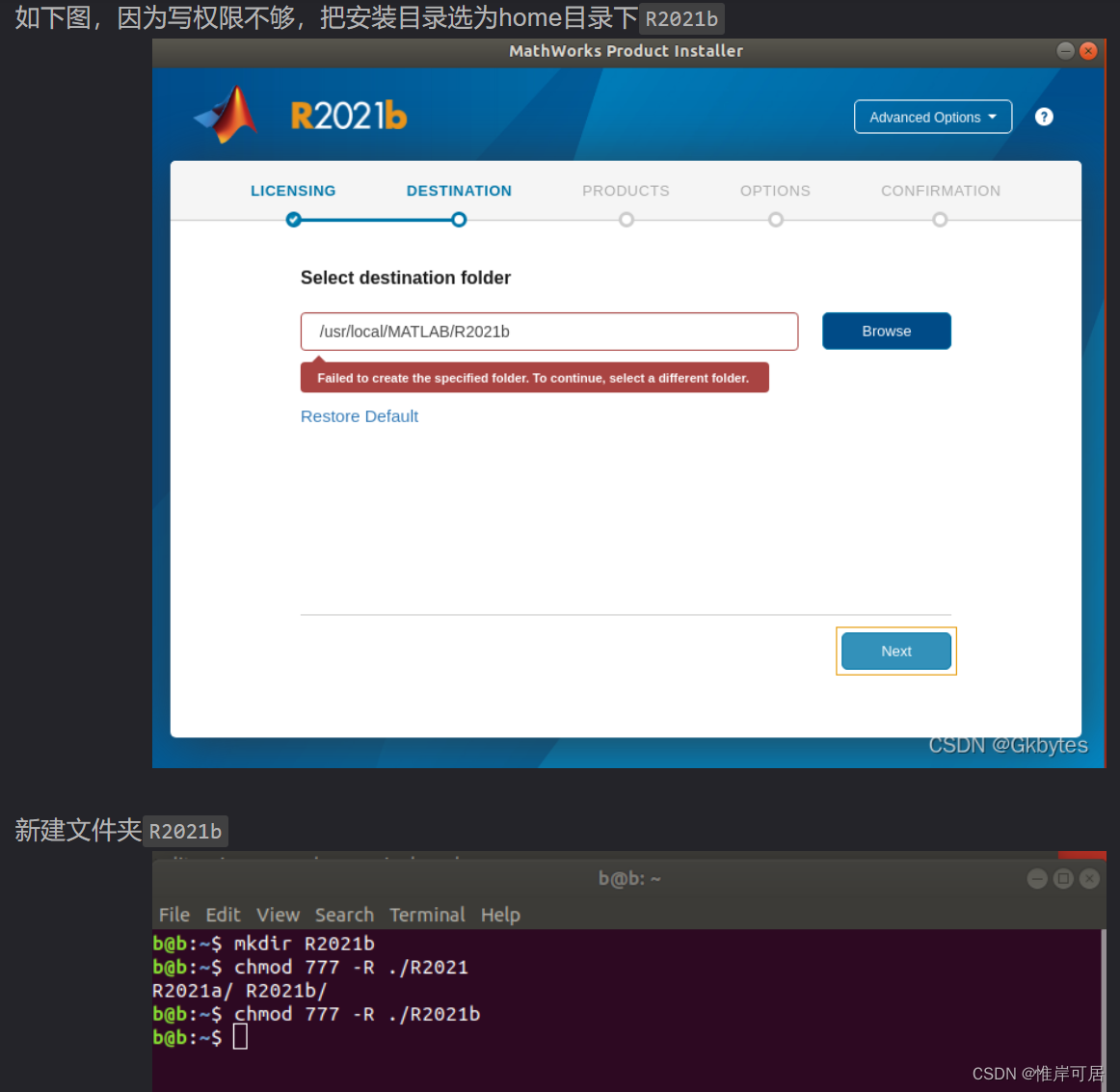
3. xie写入权限不够问题:
4. 启动方法:https://blog.csdn.net/qq_34809033/article/details/84674996
参考的方法2,用命令matlab启动
5. 长时间没启动时出现激活失败无法启动的问题:运行 /usr/local/MATLAB/R20XXx/bin/activate_matlab.sh,然后手动激活














 4123
4123











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









