







 本文对比了单目测距和双目测距的优缺点,包括单目依赖样本库、识别率低,双目精度高但计算复杂。详细介绍了双目测距原理、难点及实现步骤,涉及相机标定、深度计算等关键环节。
本文对比了单目测距和双目测距的优缺点,包括单目依赖样本库、识别率低,双目精度高但计算复杂。详细介绍了双目测距原理、难点及实现步骤,涉及相机标定、深度计算等关键环节。
单目测距和双目测距比较
单/双目方案的优势与难点
单目测距
**优点:**单目的优势在于成本较低,对计算资源的要求不高,系统结构相对简单。
缺点:在于必须不断更新和维护一个庞大的样本数据库,才能保证系统达到较高的识别率;无法对非标准障碍物进行判断;距离并非真正意义上的测量,准确度较低。
单目摄像头的大致测距原理,是先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。
双目测距
优点一是激光雷达等方案相比成本较低;二是没有识别率的限制,因为从原理上无需先进行识别再进行测算,而是对所有障碍物直接进行测量;三是精度比单目高,直接利用视差计算距离;四是无需维护样本数据库,因为对于双目没有样本的概念。
原理
双目检测的方式就是通过对两幅图像视差的计算,直接对前方景物(图像所拍摄到的范围)进行距离测量,而无需判断前方出现的是什么类型的障碍物。
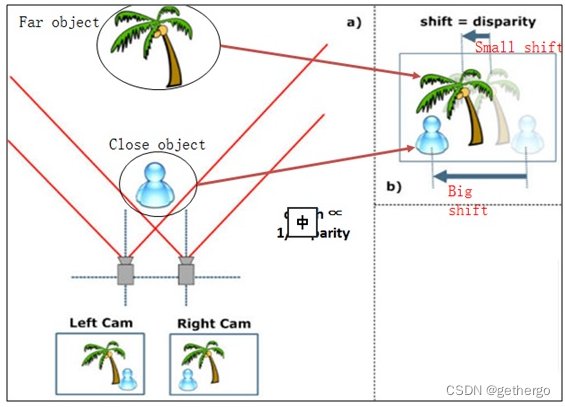
图中的人和椰子树,人在前,椰子树在后,最下方是双目相机中的成像。可以看出右侧相机成像中人在树的左侧,左侧相机成像中人在树的右侧,这是因为双目的角度不一样。再通过对比两幅图像就可以知道人眼观察树的时候视差小。而观察人时视差大,因为树的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3620
3620

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









