







气象海洋预测-Task4 模型建立之 TCNN+RNN
该方案中采用的模型是TCNN+RNN。
在Task3中我们学习了CNN+LSTM模型,但是LSTM层的参数量较大,这就带来以下问题:一是参数量大的模型在数据量小的情况下容易过拟合;二是为了尽量避免过拟合,在有限的数据集下我们无法构建更深的模型,难以挖掘到更丰富的信息。相较于LSTM,CNN的参数量只与过滤器的大小有关,在各类任务中往往都有不错的表现,因此我们可以考虑同样用卷积操作来挖掘时间信息。但是如果用三维卷积来同时挖掘时间和空间信息,假设使用的过滤器大小为(T_f, H_f, W_f),那么一层的参数量就是T_f×H_f×W_f,这样的参数量仍然是比较大的。为了进一步降低每一层的参数,增加模型深度,我们本次学习的这个TOP方案对时间和空间分别进行卷积操作,即采用TCN单元挖掘时间信息,然后输入CNN单元中挖掘空间信息,将TCN单元+CNN单元的串行结构称为TCNN层,通过堆叠多层的TCNN层就可以交替地提取时间和空间信息。同时,考虑到不同时间尺度下的时空信息对预测结果的影响可能是不同的,该方案采用了三个RNN层来抽取三种时间尺度下的特征,将三者拼接起来通过全连接层预测Nino3.4指数。
学习目标
- 学习TOP方案的模型构建方法
内容介绍
- 数据处理
- 数据扁平化
- 空值填充
- 构造数据集
- 模型构建
- 构造评估函数
- 模型构造
- 模型训练
- 模型评估
- 总结
代码示例
数据处理
该TOP方案的数据处理主要包括三部分:
- 数据扁平化。
- 空值填充。
- 构造数据集
在该方案中除了没有构造新的特征外,其他数据处理方法都与Task3基本相同,因此不多做赘述。
import netCDF4 as nc
import random
import os
from tqdm import tqdm
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
import torch
from torch import nn, optim
import torch.nn.functional as F
from torch.utils.data import Dataset, DataLoader
from sklearn.metrics import mean_squared_error
# 固定随机种子
SEED = 22
def seed_everything(seed=42):
random.seed(seed)
os.environ['PYTHONHASHSEED'] = str(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
torch.backends.cudnn.deterministic = True
seed_everything(SEED)
# 查看GPU是否可用
train_on_gpu = torch.cuda.is_available()
if not train_on_gpu:
print('CUDA is not available. Training on CPU ...')
else:
print('CUDA is available! Training on GPU ...')
CUDA is available! Training on GPU ...
# 读取数据
# 存放数据的路径
path = '/kaggle/input/ninoprediction/'
soda_train = nc.Dataset(path + 'SODA_train.nc')
soda_label = nc.Dataset(path + 'SODA_label.nc')
cmip_train = nc.Dataset(path + 'CMIP_train.nc')
cmip_label = nc.Dataset(path + 'CMIP_label.nc')
数据扁平化
采用滑窗构造数据集。
def make_flatted(train_ds, label_ds, info, start_idx=0):
keys = ['sst', 't300', 'ua', 'va']
label_key = 'nino'
# 年数
years = info[1]
# 模式数
models = info[2]
train_list = []
label_list = []
# 将同种模式下的数据拼接起来
for model_i in range(models):
blocks = []
# 对每个特征,取每条数据的前12个月进行拼接
for key in keys:
block = train_ds[key][start_idx + model_i * years: start_idx + (model_i + 1) * years, :12].reshape(-1, 24, 72, 1).data
blocks.append(block)
# 将所有特征在最后一个维度上拼接起来
train_flatted = np.concatenate(blocks, axis=-1)
# 取12-23月的标签进行拼接,注意加上最后一年的最后12个月的标签(与最后一年12-23月的标签共同构成最后一年前12个月的预测目标)
label_flatted = np.concatenate([
label_ds[label_key][start_idx + model_i * years: start_idx + (model_i + 1) * years, 12: 24].reshape(-1).data,
label_ds[label_key][start_idx + (model_i + 1) * years - 1, 24: 36].reshape(-1).data
], axis=0)
train_list.append(train_flatted)
label_list.append(label_flatted)
return train_list, label_list
soda_info = ('soda', 100, 1)
cmip6_info = ('cmip6', 151, 15)
cmip5_info = ('cmip5', 140, 17)
soda_trains, soda_labels = make_flatted(soda_train, soda_label, soda_info)
cmip6_trains, cmip6_labels = make_flatted(cmip_train, cmip_label, cmip6_info)
cmip5_trains, cmip5_labels = make_flatted(cmip_train, cmip_label, cmip5_info, cmip6_info[1]*cmip6_info[2])
# 得到扁平化后的数据维度为(模式数×序列长度×纬度×经度×特征数),其中序列长度=年数×12
np.shape(soda_trains), np.shape(cmip6_trains), np.shape(cmip5_trains)
((1, 1200, 24, 72, 4), (15, 1812, 24, 72, 4), (17, 1680, 24, 72, 4))
空值填充
将空值填充为0。
# 填充SODA数据中的空值
soda_trains = np.array(soda_trains)
soda_trains_nan = np.isnan(soda_trains)
soda_trains[soda_trains_nan] = 0
print('Number of null in soda_trains after fillna:', np.sum(np.isnan(soda_trains)))
Number of null in soda_trains after fillna: 0
# 填充CMIP6数据中的空值
cmip6_trains = np.array(cmip6_trains)
cmip6_trains_nan = np.isnan(cmip6_trains)
cmip6_trains[cmip6_trains_nan] = 0
print('Number of null in cmip6_trains after fillna:', np.sum(np.isnan(cmip6_trains)))
Number of null in cmip6_trains after fillna: 0
# 填充CMIP5数据中的空值
cmip5_trains = np.array(cmip5_trains)
cmip5_trains_nan = np.isnan(cmip5_trains)
cmip5_trains[cmip5_trains_nan] = 0
print('Number of null in cmip6_trains after fillna:', np.sum(np.isnan(cmip5_trains)))
Number of null in cmip6_trains after fillna: 0
构造数据集
构造训练和验证集。
# 构造训练集
X_train = []
y_train = []
# 从CMIP5的17种模式中各抽取100条数据
for model_i in range(17):
samples = np.random.choice(cmip5_trains.shape[1]-12, size=100)
for ind in samples:
X_train.append(cmip5_trains[model_i, ind: ind+12])
y_train.append(cmip5_labels[model_i][ind: ind+24])
# 从CMIP6的15种模式种各抽取100条数据
for model_i in range(15):
samples = np.random.choice(cmip6_trains.shape[1]-12, size=100)
for ind in samples:
X_train.append(cmip6_trains[model_i, ind: ind+12])
y_train.append(cmip6_labels[model_i][ind: ind+24])
X_train = np.array(X_train)
y_train = np.array(y_train)
# 构造验证集
X_valid = []
y_valid = []
samples = np.random.choice(soda_trains.shape[1]-12, size=100)
for ind in samples:
X_valid.append(soda_trains[0, ind: ind+12])
y_valid.append(soda_labels[0][ind: ind+24])
X_valid = np.array(X_valid)
y_valid = np.array(y_valid)
# 查看数据集维度
X_train.shape, y_train.shape, X_valid.shape, y_valid.shape
((3200, 12, 24, 72, 4), (3200, 24), (100, 12, 24, 72, 4), (100, 24))
# 保存数据集
np.save('X_train_sample.npy', X_train)
np.save('y_train_sample.npy', y_train)
np.save('X_valid_sample.npy', X_valid)
np.save('y_valid_sample.npy', y_valid)
模型构建
这一部分我们来重点学习一下该方案的模型结构。
# 读取数据集
X_train = np.load('../input/ai-earth-task04-samples/X_train_sample.npy')
y_train = np.load('../input/ai-earth-task04-samples/y_train_sample.npy')
X_valid = np.load('../input/ai-earth-task04-samples/X_valid_sample.npy')
y_valid = np.load('../input/ai-earth-task04-samples/y_valid_sample.npy')
X_train.shape, y_train.shape, X_valid.shape, y_valid.shape
((3200, 12, 24, 72, 4), (3200, 24), (100, 12, 24, 72, 4), (100, 24))
# 构造数据管道
class AIEarthDataset(Dataset):
def __init__(self, data, label):
self.data = torch.tensor(data, dtype=torch.float32)
self.label = torch.tensor(label, dtype=torch.float32)
def __len__(self):
return len(self.label)
def __getitem__(self, idx):
return self.data[idx], self.label[idx]
batch_size = 32
trainset = AIEarthDataset(X_train, y_train)
trainloader = DataLoader(trainset, batch_size=batch_size, shuffle=True)
validset = AIEarthDataset(X_valid, y_valid)
validloader = DataLoader(validset, batch_size=batch_size, shuffle=True)
构造评估函数
def rmse(y_true, y_preds):
return np.sqrt(mean_squared_error(y_pred = y_preds, y_true = y_true))
# 评估函数
def score(y_true, y_preds):
# 相关性技巧评分
accskill_score = 0
# RMSE
rmse_scores = 0
a = [1.5] * 4 + [2] * 7 + [3] * 7 + [4] * 6
y_true_mean = np.mean(y_true, axis=0)
y_pred_mean = np.mean(y_preds, axis=0)
for i in range(24):
fenzi = np.sum((y_true[:, i] - y_true_mean[i]) * (y_preds[:, i] - y_pred_mean[i]))
fenmu = np.sqrt(np.sum((y_true[:, i] - y_true_mean[i])**2) * np.sum((y_preds[:, i] - y_pred_mean[i])**2))
cor_i = fenzi / fenmu
accskill_score += a[i] * np.log(i+1) * cor_i
rmse_score = rmse(y_true[:, i], y_preds[:, i])
rmse_scores += rmse_score
return 2/3.0 * accskill_score - rmse_scores
模型构造
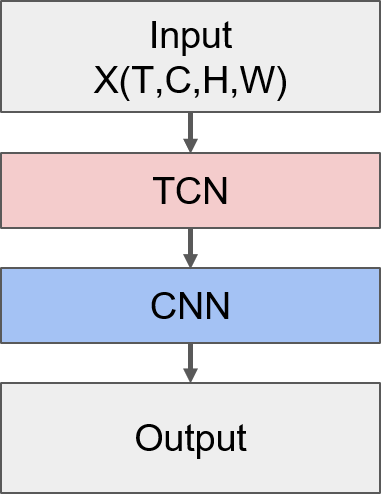
该TOP方案采用TCN单元+CNN单元串行组成TCNN层,通过堆叠多层的TCNN层来交替地提取时间和空间信息,并将提取到的时空信息用RNN来抽取出三种不同时间尺度的特征表达。
- TCN单元
TCN模型全称时间卷积网络(Temporal Convolutional Network),与RNN一样是时序模型。TCN以CNN为基础,为了适应序列问题,它从以下三方面做出了改进:
- 因果卷积
TCN处理输入与输出等长的序列问题,它的每一个隐藏层节点数与输入步长是相同的,并且隐藏层t时刻节点的值只依赖于前一层t时刻及之前节点的值。也就是说TCN通过追溯前因(t时刻及之前的值)来获得当前结果,称为因果卷积。
- 扩张卷积
传统CNN的感受野受限于卷积核的大小,需要通过增加池化层来获得更大的感受野,但是池化的操作会带来信息的损失。为了解决这个问题,TCN采用扩张卷积来增大感受野,获取更长时间的信息。扩张卷积对输入进行间隔采样,采样间隔由扩张因子d控制,公式定义如下:
F
(
s
)
=
(
X
∗
d
f
)
(
s
)
=
∑
i
=
0
k
−
1
f
(
i
)
×
X
s
−
d
i
F(s) = (X * df)(s) = \sum_{i=0}^{k-1} f(i) \times X_{s-di}
F(s)=(X∗df)(s)=i=0∑k−1f(i)×Xs−di
其中X为当前层的输入,k为当前层的卷积核大小,s为当前节点的时刻。也就是说,对于扩张因子为d、卷积核为k的隐藏层,对前一层的输入每d个点采样一次,共采样k个点作为当前时刻s的输入。这样TCN的感受野就由卷积核的大小k和扩张因子d共同决定,可以获取更长时间的依赖信息。

- 残差连接
网络的层数越多,所能提取到的特征就越丰富,但这也会带来梯度消失或爆炸的问题,目前解决这个问题的一个有效方法就是残差连接。TCN的残差模块包含两层卷积操作,并且采用了WeightNorm和Dropout进行正则化,如下图所示。
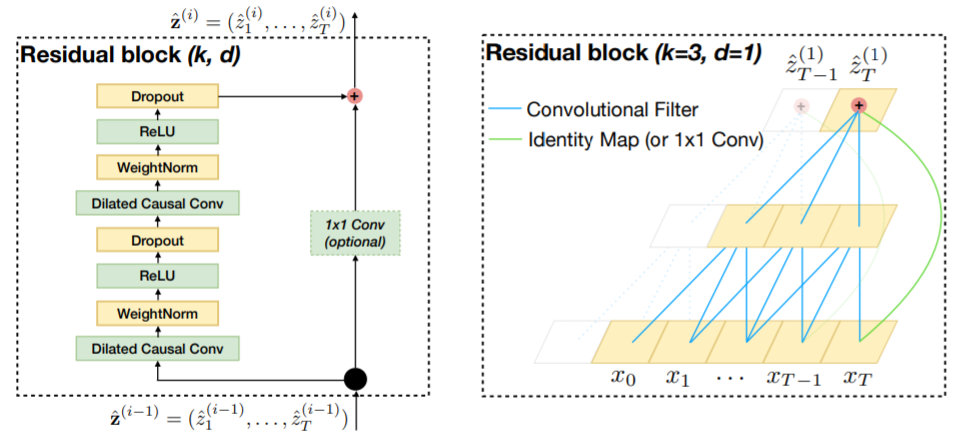
总的来说,TCN是卷积操作在序列问题上的改进,具有CNN参数量少的优点,可以搭建更深层的网络,相比于RNN不容易存在梯度消失和爆炸的问题,同时TCN具有灵活的感受野,能够适应不同的任务,在许多数据集上的比较表明TCN比RNN、LSTM、GRU等序列模型有更好的表现。
想要更深入地了解TCN可以参考以下链接:
- 论文原文:https://arxiv.org/pdf/1803.01271.pdf
- GitHub:https://github.com/locuslab/tcn
该方案中所构建的TCN单元并不是标准的TCN层,它的结构如下图所示,可以看到,这里的TCN单元只是用了一个卷积层,并且在卷积层前后都采用了BatchNormalization来提高模型的泛化能力。需要注意的是,这里的卷积操作是对时间维度进行操作,因此需要对输入的形状进行转换,并且为了便于匹配之后的网络层,需要将输出的形状转换回输入时的(N,T,C,H,W)的形式。

# 构建TCN单元
class TCNBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride, padding):
super().__init__()
self.bn1 = nn.BatchNorm1d(in_channels)
self.conv = nn.Conv1d(in_channels, out_channels, kernel_size, stride, padding)
self.bn2 = nn.BatchNorm1d(out_channels)
if in_channels == out_channels and stride == 1:
self.res = lambda x: x
else:
self.res = nn.Conv1d(in_channels, out_channels, kernel_size=1, stride=stride)
def forward(self, x):
# 转换输入形状
N, T, C, H, W = x.shape
x = x.permute(0, 3, 4, 2, 1).contiguous()
x = x.view(N*H*W, C, T)
# 残差
res = self.res(x)
res = self.bn2(res)
x = F.relu(self.bn1(x))
x = self.conv(x)
x = self.bn2(x)
x = x + res
# 将输出转换回(N,T,C,H,W)的形式
_, C_new, T_new = x.shape
x = x.view(N, H, W, C_new, T_new)
x = x.permute(0, 4, 3, 1, 2).contiguous()
return x
- CNN单元
CNN单元结构与TCN单元相似,都只有一个卷积层,并且使用BatchNormalization来提高模型泛化能力。同时,类似TCN单元,CNN单元中也加入了残差连接。结构如下图所示:

# 构建CNN单元
class CNNBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride, padding):
super().__init__()
self.bn1 = nn.BatchNorm2d(in_channels)
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding)
self.bn2 = nn.BatchNorm2d(out_channels)
if (in_channels == out_channels) and (stride == 1):
self.res = lambda x: x
else:
self.res = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride)
def forward(self, x):
# 转换输入形状
N, T, C, H, W = x.shape
x = x.view(N*T, C, H, W)
# 残差
res = self.res(x)
res = self.bn2(res)
x = F.relu(self.bn1(x))
x = self.conv(x)
x = self.bn2(x)
x = x + res
# 将输出转换回(N,T,C,H,W)的形式
_, C_new, H_new, W_new = x.shape
x = x.view(N, T, C_new, H_new, W_new)
return x
- TCNN层
将TCN单元和CNN单元串行连接,就构成了一个TCNN层。
class TCNNBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride_tcn, stride_cnn, padding):
super().__init__()
self.tcn = TCNBlock(in_channels, out_channels, kernel_size, stride_tcn, padding)
self.cnn = CNNBlock(out_channels, out_channels, kernel_size, stride_cnn, padding)
def forward(self, x):
x = self.tcn(x)
x = self.cnn(x)
return x
- TCNN+RNN模型
整体的模型结构如下图所示:

- TCNN部分
TCNN部分的模型结构类似传统CNN的结构,非常规整,通过逐渐增加通道数来提取更丰富的特征表达。需要注意的是输入数据的格式是(N,T,H,W,C),为了匹配卷积层的输入格式,需要将数据格式转换为(N,T,C,H,W)。
- GAP层
GAP全称为全局平均池化(Global Average Pooling)层,它的作用是把每个通道上的特征图取全局平均,假设经过TCNN部分得到的输出格式为(N,T,C,H,W),那么GAP层就会把每个通道上形状为H×W的特征图上的所有值求平均,最终得到的输出格式就变成(N,T,C)。GAP层最早出现在论文《Network in Network》(论文原文:https://arxiv.org/pdf/1312.4400.pdf )中用于代替传统CNN中的全连接层,之后的许多实验证明GAP层确实可以提高CNN的效果。
那么GAP层为什么可以代替全连接层呢?在传统CNN中,经过多层卷积和池化的操作后,会由Flatten层将特征图拉伸成一列,然后经过全连接层,那么对于形状为(C,H,W)的一条数据,经Flatten层拉伸后的长度为C×H×W,此时假设全连接层节点数为U,全连接层的参数量就是C×H×W×U,这么大的参数量很容易使得模型过拟合。相比之下,GAP层不引入新的参数,因此可以有效减少过拟合问题,并且模型参数少也能加快训练速度。另一方面,全连接层是一个黑箱子,我们很难解释多分类的信息是怎样传回卷积层的,而GAP层就很容易理解,每个通道的值就代表了经过多层卷积操作后所提取出来的特征。更详细的理解可以参考https://www.zhihu.com/question/373188099
在Pytorch中没有内置的GAP层,因此可以用adaptive_avg_pool2d来替代,这个函数可以将特征图压缩成给定的输出形状,将output_size参数设置为(1,1),就等同于GAP操作,函数的详细使用方法可以参考https://pytorch.org/docs/stable/generated/torch.nn.functional.adaptive_avg_pool2d.html?highlight=adaptive_avg_pool2d#torch.nn.functional.adaptive_avg_pool2d
- RNN部分
至此为止我们所使用的都是长度为12的时间序列,每个时间步代表一个月的信息。不同尺度的时间序列所携带的信息是不尽相同的,比如用长度为6的时间序列来表达一年的SST值,那么每个时间步所代表的就是两个月的SST信息,这种时间尺度下的SST序列与长度为12的SST序列所反映的一年中SST变化趋势等信息就不完全相同。所以,为了尽可能全面地挖掘更多信息,该TOP方案中用MaxPool层来获得三种不同时间尺度的序列,同时,用RNN层来抽取序列的特征表达。RNN非常适合用于线性序列的自动特征提取,例如对于形状为(T,C1)的一条输入数据,R经过节点数为C2的RNN层就能抽取出长度为C2的向量,由于RNN由前往后进行信息线性传递的网络结构,抽取出的向量能够很好地表达序列中的依赖关系。
此时三种不同时间尺度的序列都抽取出了一个向量来表示,将向量拼接起来再经过一个全连接层就得到了24个月的预测序列。
# 构造模型
class Model(nn.Module):
def __init__(self):
super().__init__()
self.conv = nn.Conv2d(4, 64, kernel_size=7, stride=2, padding=3)
self.tcnn1 = TCNNBlock(64, 64, 3, 1, 1, 1)
self.tcnn2 = TCNNBlock(64, 128, 3, 1, 2, 1)
self.tcnn3 = TCNNBlock(128, 128, 3, 1, 1, 1)
self.tcnn4 = TCNNBlock(128, 256, 3, 1, 2, 1)
self.tcnn5 = TCNNBlock(256, 256, 3, 1, 1, 1)
self.rnn = nn.RNN(256, 256, batch_first=True)
self.maxpool = nn.MaxPool1d(2)
self.fc = nn.Linear(256*3, 24)
def forward(self, x):
# 转换输入形状
N, T, H, W, C = x.shape
x = x.permute(0, 1, 4, 2, 3).contiguous()
x = x.view(N*T, C, H, W)
# 经过一个卷积层
x = self.conv(x)
_, C_new, H_new, W_new = x.shape
x = x.view(N, T, C_new, H_new, W_new)
# TCNN部分
for i in range(3):
x = self.tcnn1(x)
x = self.tcnn2(x)
for i in range(2):
x = self.tcnn3(x)
x = self.tcnn4(x)
for i in range(2):
x = self.tcnn5(x)
# 全局平均池化
x = F.adaptive_avg_pool2d(x, (1, 1)).squeeze()
# RNN部分,分别得到长度为T、T/2、T/4三种时间尺度的特征表达,注意转换RNN层输出的格式
hidden_state = []
for i in range(3):
x, h = self.rnn(x)
h = h.squeeze()
hidden_state.append(h)
x = self.maxpool(x.transpose(1, 2)).transpose(1, 2)
x = torch.cat(hidden_state, dim=1)
x = self.fc(x)
return x
model = Model()
print(model)
Model(
(conv): Conv2d(4, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3))
(tcnn1): TCNNBlock(
(tcn): TCNBlock(
(bn1): BatchNorm1d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv1d(64, 64, kernel_size=(3,), stride=(1,), padding=(1,))
(bn2): BatchNorm1d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(cnn): CNNBlock(
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(tcnn2): TCNNBlock(
(tcn): TCNBlock(
(bn1): BatchNorm1d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv1d(64, 128, kernel_size=(3,), stride=(1,), padding=(1,))
(bn2): BatchNorm1d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(res): Conv1d(64, 128, kernel_size=(1,), stride=(1,))
)
(cnn): CNNBlock(
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(res): Conv2d(128, 128, kernel_size=(1, 1), stride=(2, 2))
)
)
(tcnn3): TCNNBlock(
(tcn): TCNBlock(
(bn1): BatchNorm1d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv1d(128, 128, kernel_size=(3,), stride=(1,), padding=(1,))
(bn2): BatchNorm1d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(cnn): CNNBlock(
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(tcnn4): TCNNBlock(
(tcn): TCNBlock(
(bn1): BatchNorm1d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv1d(128, 256, kernel_size=(3,), stride=(1,), padding=(1,))
(bn2): BatchNorm1d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(res): Conv1d(128, 256, kernel_size=(1,), stride=(1,))
)
(cnn): CNNBlock(
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(res): Conv2d(256, 256, kernel_size=(1, 1), stride=(2, 2))
)
)
(tcnn5): TCNNBlock(
(tcn): TCNBlock(
(bn1): BatchNorm1d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv1d(256, 256, kernel_size=(3,), stride=(1,), padding=(1,))
(bn2): BatchNorm1d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(cnn): CNNBlock(
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(rnn): RNN(256, 256, batch_first=True)
(maxpool): MaxPool1d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(fc): Linear(in_features=768, out_features=24, bias=True)
)
模型训练
# 采用RMSE作为损失函数
def RMSELoss(y_pred,y_true):
loss = torch.sqrt(torch.mean((y_pred-y_true)**2, dim=0)).sum()
return loss
model_weights = './task04_model_weights.pth'
device = 'cuda' if torch.cuda.is_available() else 'cpu'
model = Model().to(device)
criterion = RMSELoss
optimizer = optim.Adam(model.parameters(), lr=1e-3)
epochs = 10
train_losses, valid_losses = [], []
scores = []
best_score = float('-inf')
preds = np.zeros((len(y_valid),24))
for epoch in range(epochs):
print('Epoch: {}/{}'.format(epoch+1, epochs))
# 模型训练
model.train()
losses = 0
for data, labels in tqdm(trainloader):
data = data.to(device)
labels = labels.to(device)
optimizer.zero_grad()
pred = model(data)
loss = criterion(pred, labels)
losses += loss.cpu().detach().numpy()
loss.backward()
optimizer.step()
train_loss = losses / len(trainloader)
train_losses.append(train_loss)
print('Training Loss: {:.3f}'.format(train_loss))
# 模型验证
model.eval()
losses = 0
with torch.no_grad():
for i, data in tqdm(enumerate(validloader)):
data, labels = data
data = data.to(device)
labels = labels.to(device)
pred = model(data)
loss = criterion(pred, labels)
losses += loss.cpu().detach().numpy()
preds[i*batch_size:(i+1)*batch_size] = pred.detach().cpu().numpy()
valid_loss = losses / len(validloader)
valid_losses.append(valid_loss)
print('Validation Loss: {:.3f}'.format(valid_loss))
s = score(y_valid, preds)
scores.append(s)
print('Score: {:.3f}'.format(s))
# 保存最佳模型权重
if s > best_score:
best_score = s
checkpoint = {'best_score': s,
'state_dict': model.state_dict()}
torch.save(checkpoint, model_weights)
Epoch: 1/10
100%|██████████| 100/100 [00:51<00:00, 1.95it/s]
Training Loss: 18.099
4it [00:00, 6.19it/s]
Validation Loss: 16.756
Score: -4.320
Epoch: 2/10
100%|██████████| 100/100 [00:45<00:00, 2.17it/s]
Training Loss: 16.955
4it [00:00, 6.41it/s]
Validation Loss: 17.657
Score: -32.332
Epoch: 3/10
100%|██████████| 100/100 [00:45<00:00, 2.18it/s]
Training Loss: 16.639
4it [00:00, 6.29it/s]
Validation Loss: 19.156
Score: -25.483
Epoch: 4/10
100%|██████████| 100/100 [00:45<00:00, 2.17it/s]
Training Loss: 16.173
4it [00:00, 6.29it/s]
Validation Loss: 18.130
Score: -15.470
Epoch: 5/10
100%|██████████| 100/100 [00:45<00:00, 2.17it/s]
Training Loss: 15.818
4it [00:00, 6.28it/s]
Validation Loss: 17.367
Score: -14.745
Epoch: 6/10
100%|██████████| 100/100 [00:46<00:00, 2.17it/s]
Training Loss: 15.464
4it [00:00, 6.28it/s]
Validation Loss: 18.289
Score: -4.441
Epoch: 7/10
100%|██████████| 100/100 [00:46<00:00, 2.17it/s]
Training Loss: 15.175
4it [00:00, 6.26it/s]
Validation Loss: 18.604
Score: -21.144
Epoch: 8/10
100%|██████████| 100/100 [00:46<00:00, 2.17it/s]
Training Loss: 15.004
4it [00:00, 6.27it/s]
Validation Loss: 18.593
Score: -27.508
Epoch: 9/10
100%|██████████| 100/100 [00:46<00:00, 2.17it/s]
Training Loss: 14.578
4it [00:00, 6.28it/s]
Validation Loss: 18.264
Score: -19.113
Epoch: 10/10
100%|██████████| 100/100 [00:46<00:00, 2.17it/s]
Training Loss: 14.330
4it [00:00, 6.27it/s]
Validation Loss: 17.739
Score: -18.628
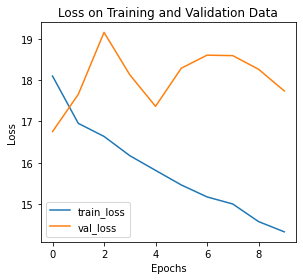
# 绘制训练/验证曲线
def training_vis(train_losses, valid_losses):
# 绘制损失函数曲线
fig = plt.figure(figsize=(8,4))
# subplot loss
ax1 = fig.add_subplot(121)
ax1.plot(train_losses, label='train_loss')
ax1.plot(valid_losses,label='val_loss')
ax1.set_xlabel('Epochs')
ax1.set_ylabel('Loss')
ax1.set_title('Loss on Training and Validation Data')
ax1.legend()
plt.tight_layout()
training_vis(train_losses, valid_losses)
模型评估
在测试集上评估模型效果。
# 加载最佳模型权重
checkpoint = torch.load('../input/ai-earth-model-weights/task04_model_weights.pth')
model = Model()
model.load_state_dict(checkpoint['state_dict'])
<All keys matched successfully>
# 测试集路径
test_path = '../input/ai-earth-tests/'
# 测试集标签路径
test_label_path = '../input/ai-earth-tests-labels/'
import os
# 读取测试数据和测试数据的标签
files = os.listdir(test_path)
X_test = []
y_test = []
for file in files:
X_test.append(np.load(test_path + file))
y_test.append(np.load(test_label_path + file))
X_test = np.array(X_test)
y_test = np.array(y_test)
X_test.shape, y_test.shape
((103, 12, 24, 72, 4), (103, 24))
testset = AIEarthDataset(X_test, y_test)
testloader = DataLoader(testset, batch_size=batch_size, shuffle=False)
# 在测试集上评估模型效果
model.eval()
model.to(device)
preds = np.zeros((len(y_test),24))
for i, data in tqdm(enumerate(testloader)):
data, labels = data
data = data.to(device)
labels = labels.to(device)
pred = model(data)
preds[i*batch_size:(i+1)*batch_size] = pred.detach().cpu().numpy()
s = score(y_test, preds)
print('Score: {:.3f}'.format(s))
4it [00:00, 12.75it/s]
Score: 20.274
总结
- 该方案充分考虑到数据量小、特征少的数据情况,对时间和空间分别进行卷积操作,交替地提取时间和空间信息,用GAP层对提取的信息进行降维,尽可能减少每一层的参数量、增加模型层数以提取更丰富的特征。
- 该方案考虑到不同时间尺度序列所携带的信息不同,用池化层变换时间尺度,并用RNN进行信息提取,综合三种不同时间尺度的序列信息得到最终的预测序列。
- 该方案同样选择了自己设计模型,在构造模型时充分考虑了数据集情况和问题背景,并能灵活运用各种网络层来处理特定问题,这种模型构造思路要求对不同网络层的作用有较为深刻地理解,方案中各种网络层的用法值得大家学习和借鉴。
参考文献
- Top1思路分享:https://tianchi.aliyun.com/forum/postDetail?spm=5176.12586969.1002.6.561d482cp7CFlx&postId=210391














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









