






本文主要从目标跟踪方面介绍卡尔曼滤波,如果想特别深入了解公式的话,可参考如下链接:
https://www.bilibili.com/video/BV1Rh41117MT/?spm_id_from=333.1007.top_right_bar_window_custom_collection.content.click
明天更新C++代码解析。
1、前言
由匈牙利匹配算法可知,一种常见的匹配算法是IOU匹配,也就是第一帧和第二针的边界框的IOU值(交并比)越高,则两框的距离离的越近,越容易匹配的到:
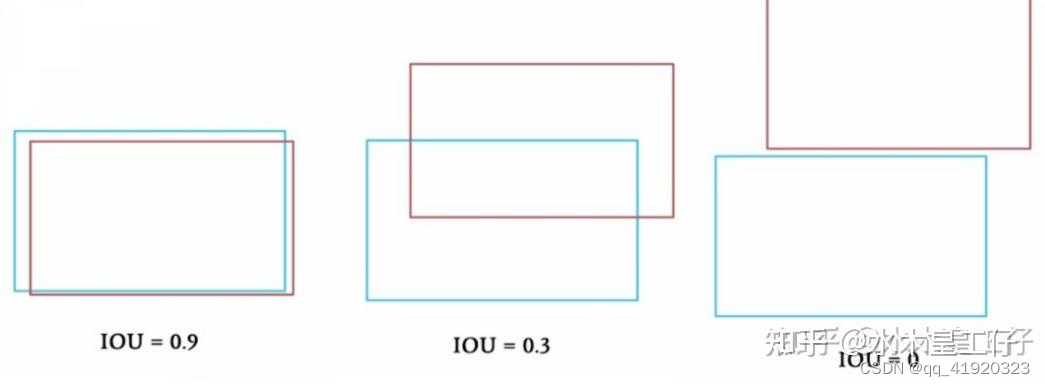
然而在实际问题中,可能会出现如下问题:
1)第二帧检测不到目标,或检测的框和第一帧的框没有重合部分,此时IOU为0;
此时可以保留前一帧的框,但误差较大,而卡尔曼滤波可以给你预测一个比上一帧更好的结果框
2)目标检测器检测能力不行
此时卡尔曼滤波可以根据前一帧k-1和当前帧k的目标检测框预测一个更好地框给当前框。
2、算法流程理解
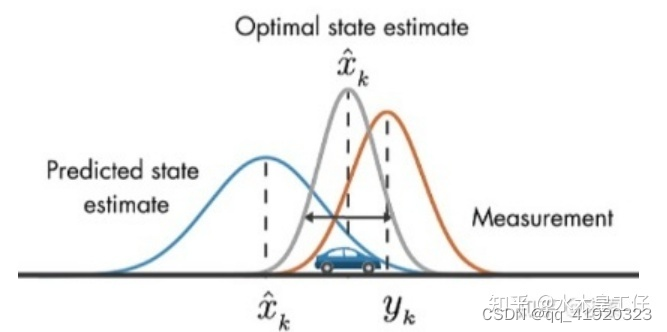
从视频抽出两帧来,要跟踪的小车从左到右移动,我们有一个观测器可以观测都当前小车的位置,但这个观测器具有一定的误差。
t - 1时刻假设我们知道小车的具体位置x1,这个时候我们的任务也只有一个:把t 时刻的小车也给出一个具体位置 x2。
卡尔曼滤波大致流程可看做三步:预测、观测、加权。
预测:通过小车之前的速度信息,通过一定的模型预测出来当前帧的位置p1;
观测:通过观测器,我们可以观测到当前帧小车的位置q1;
加权:就是把我们预测的结果和观测的结果通过如下公式加权平均;
x2 = a*p1 + (1 - a)*q1 , 0 =< a <= 1
a权值,也叫卡尔曼系数;
而这三步,体现在目标跟踪上就是:
预测:通过之前边界框移动的信息,预测出当前框的位置;
观测:通过目标检测器(如YOLO)检测处当前框的位置;
加权:两个框的位置加权平均。
3、通过均值和方差跟踪边界框
3.1 输入:均值状态
我们需要把边界框的状态信息输入进去
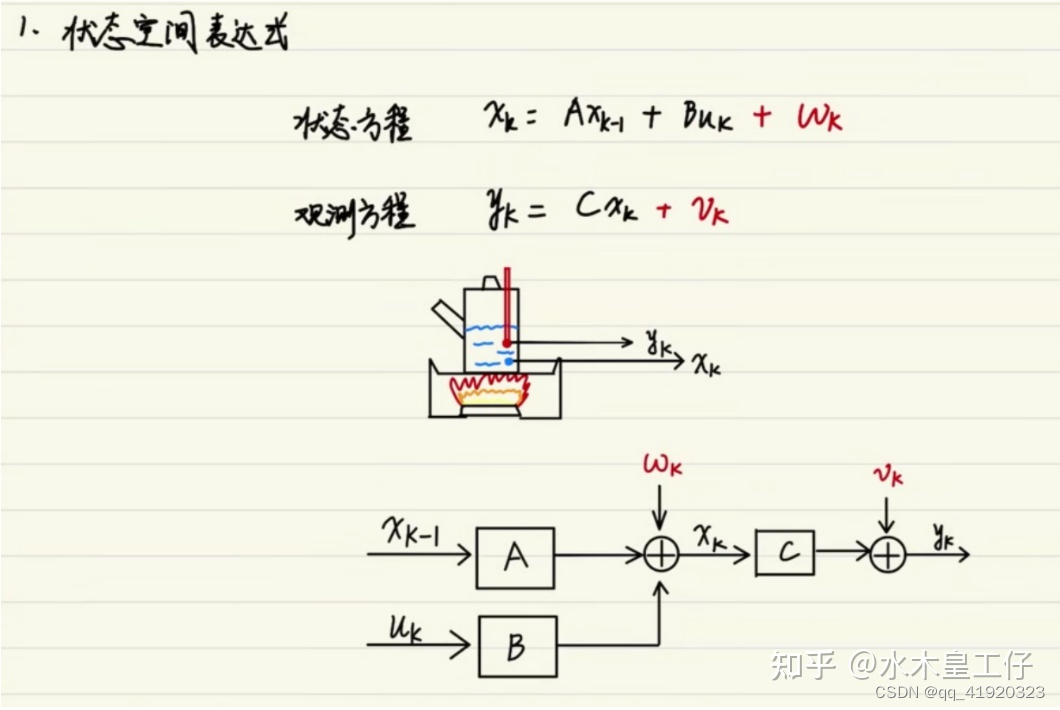
学过自控的应该很好理解:
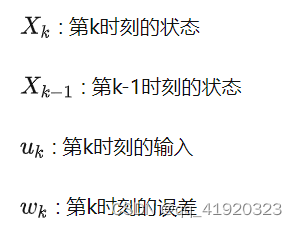
由于外力向量u可忽略,只看X即可:在需要跟踪的视频中,X可表示为:
X = [ cx cy w h vx vy vw vh ]
cx, cy:边界框的中心点
w , h : 边界框的宽和高
vx, vy, vw, vh: 变化速度
均值的话,即为所有目标框的均值
初始化中,可直接将速度设为零
3.2 方差:误差
在预测和观测中,都存在误差,但它们都服从高斯分布,该方差就是我们在估计中的不确定矩阵,而该矩阵需要我们自己微调,值越大代表误差越大:
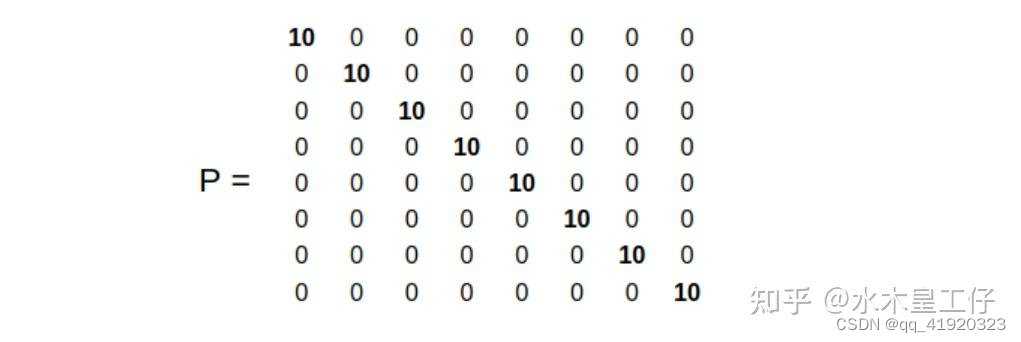
该方差会在卡尔曼滤波的不断迭代过程中逐渐变小,也就是减少不确定性。
4、预测和更新
**4.1 预测:**基于track在t-1时刻的状态来预测其在t时刻的状态
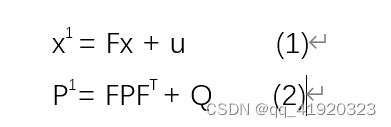
在公式1中,x为track在t-1时刻的均值,F称为状态转移矩阵,该公式预测t时刻的x’:
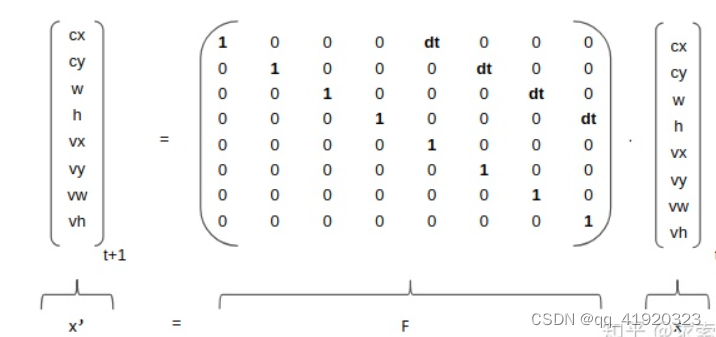
矩阵F中的dt是当前帧和前一帧之间的差,将等号右边的矩阵乘法展开,可以得到cx’=cx+dtvx,cy’=cy+dtvy…,所以这里的卡尔曼滤波是一个匀速模型;
在公式2中,P为track在t-1时刻的协方差,Q为系统的噪声矩阵,代表整个系统的可靠程度,一般初始化为很小的值,该公式预测t时刻的P’;Q在目标跟踪当中就是卡尔曼第一步预测出来的误差,就比如如果你要跟踪的那辆车一直在匀速运动,那么这个Q(误差)就只需要设得很小。
4.2 更新
基于t时刻检测到的detection,校正与其关联的track的状态,得到一个更精确的结果。
更新公式如下图:
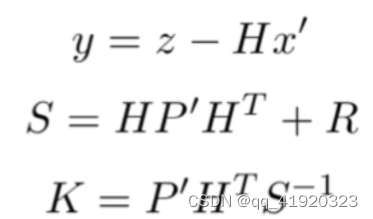
这个更新其实就是观测+加权;公式中体现出来的就是 x = x’ + Ky , 其中x’是预测值,y是观测值
相关矩阵表示:测量矩阵Z(目标检测器),就是当前目标检测器看到的框,没有速度信息
Z = [ cx cy w h ]
转移矩阵H:

噪声矩阵R:

这个就是我们的目标检测器的误差,上面矩阵的值代表,对于cx和cy的误差没有那么大,而长和宽的预测的误差比较大。
得知矩阵的所有定义之后,我们就可以根据公式进行卡尔曼滤波的迭代了。
















 3559
3559











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











