







Apollo规划控制学习笔记
- 前言
- 一、控制部分
- 二、规划(不完整)部分
- 0.轨迹拼接_规划起点(replan)
- 1.Apollo规划学习
- 2.路径规划学习
- 3.LaneChangeDecider
- 4.PathBoundsDecider
- 5.Frenet和笛卡尔坐标系转化
- 6.PiecewiseJerkPathOptimizer
- 7.路径规划的二次规划
- 8.PathAssessmentDecider
- 9.PathDecider
- 10.RuleBasedStopDecider
- 11.速度规划学习
- 12.STBoundsDecider
- 13.SpeedBoundsDecider
- 14.PathTimeHeuristicOptimizer
- 15.Speed_decider
- 16.PiecewiseJerkSpeedNonlinearOptimizer
- 17.速度规划中的二次规划
- 18.速度规划中的非线性规划
- 19.IPOPT记录
- 总结
前言
个人基于Apollo6.0的代码笔记的一些记录,仅仅个人的思考,欢迎一起学习探讨。
一、控制部分
1.Control输入输出消息类型

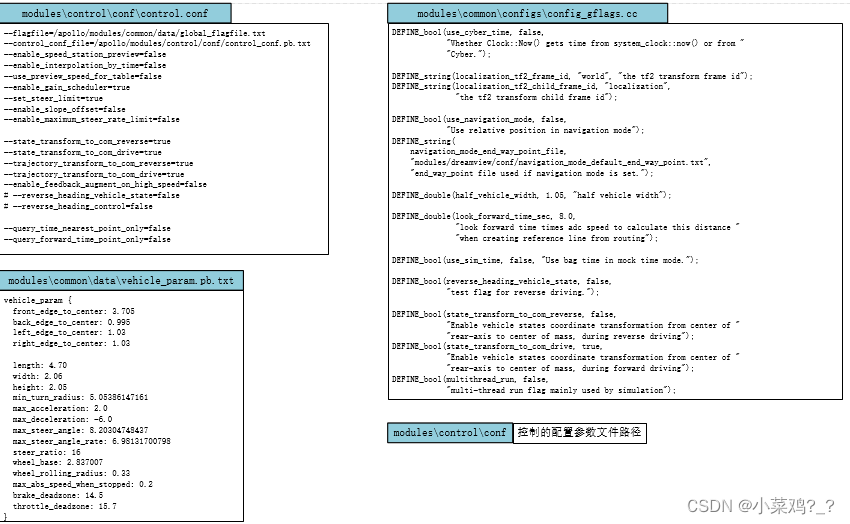
2.Control参数配置文件
3.计算纵向控制命令

4.计算纵向相关误差Errors

5.计算横向控制命令

6.计算横向相关误差Errors

7.MPC算法分析

8.MPC计算误差

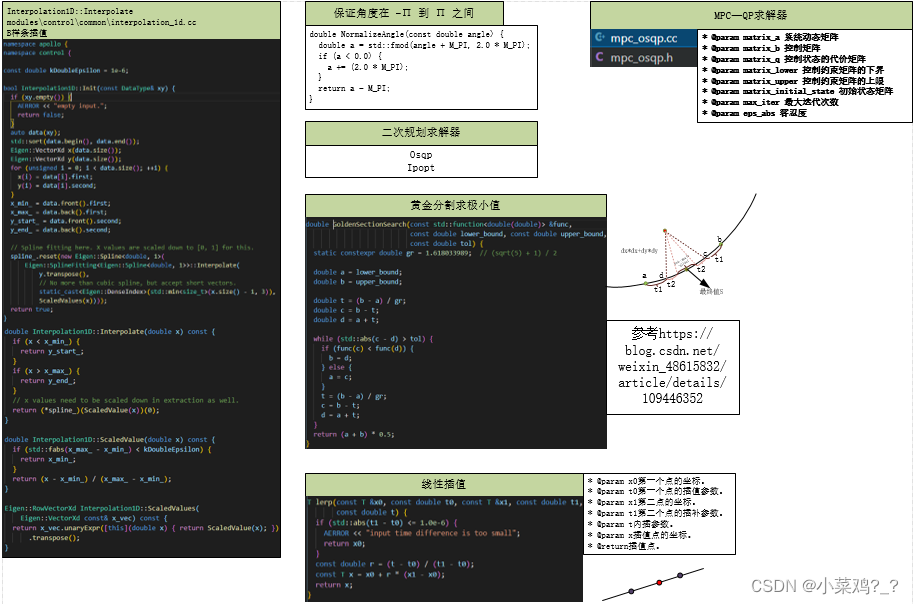
9.MPC_QP求解器

10.math
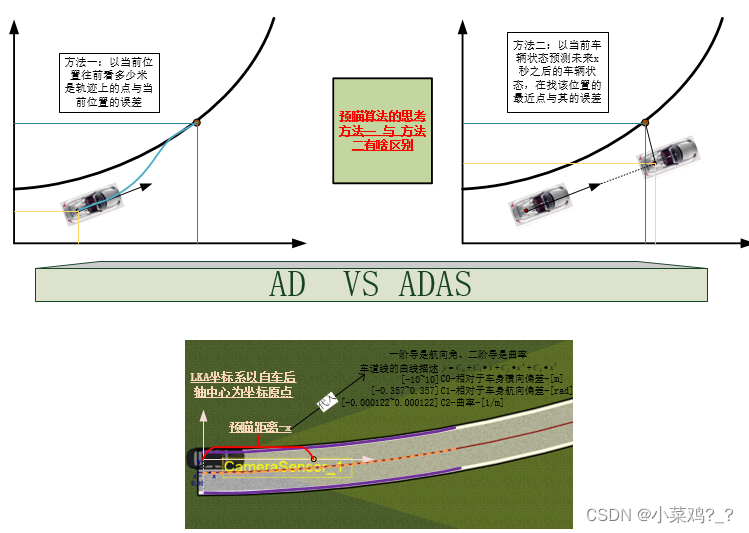
11.关于预瞄算法的思考
二、规划(不完整)部分

0.轨迹拼接_规划起点(replan)

1.Apollo规划学习

2.路径规划学习

3.LaneChangeDecider

4.PathBoundsDecider

5.Frenet和笛卡尔坐标系转化

6.PiecewiseJerkPathOptimizer

7.路径规划的二次规划

8.PathAssessmentDecider

9.PathDecider

10.RuleBasedStopDecider

11.速度规划学习

12.STBoundsDecider

13.SpeedBoundsDecider

14.PathTimeHeuristicOptimizer

15.Speed_decider

16.PiecewiseJerkSpeedNonlinearOptimizer

17.速度规划中的二次规划

18.速度规划中的非线性规划

19.IPOPT记录

总结
以上是本人第一次对Apollo规划控制代码的一些浅浅理解。
有以下说明:
1.本人是小菜鸡(loser级别的),不是大神,是兴趣所趋。
2.可以私聊,一起来学习,一起来完善上述内容。如何仅仅想看的话请移步以下地址下载(可能需要-出一下血,一杯咖啡就可以哈):
https://download.csdn.net/download/qq_42027654/88527255
3.后期也会持续学习的!!!















 1330
1330











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











