







动机和贡献
- 车辆合作感知可以扩大单个车辆的感知视野和增强感知能力。
- 直接共享原始点云数据产生的通信量,在当下的网络通信条件下是不实际的。
- 相比于原始点云共享和融合,体素特征(或空间特征)融合可以达到相近的检测效果,且通信量较小。
- 点云特征融合工作(F-Cooper)忽略了待融合特征图之间的语义信息差异,直接采用maxout提取典型特征是不合适的。F-Cooper框架在融合目标检测精度上还有提升的空间,且对于远距离和遮挡的目标检测效果不好。
- 在CoFF中,提出了一种动态的 information based spatial feature fusion方法,根据待融合的特征图中的特征值所含新语义信息的多少,对融合特征图按比例比例进行加权;提出一种线性的feature enhancement方法,扩大代表目标(包含远距离目标和被遮挡的目标)的特征值,保持其他部分(例如背景)的特征值不变,即扩大代表目标和代表背景的特征之间的差异。
F-Cooper融合特征图的检测结果缺陷示例
主要表现为融合(比较)函数maxout的缺点。
对于同一区域(蓝色矩形框),由于接收车辆距离目标相对较远或者中间有障碍物阻挡,探测到目标的雷达信号较弱且稀疏,生成的弱特征在目标检测过程中会导致检测不到的情况;另一方面,发送车辆距离目标较近,生成的强特征可以很好地检测出目标;然而,当两个车辆的特征图进行融合时,接收车辆特征图的某些特征值可能大于发送车辆特征图中的某些值,若使用maxout进行特征融合(保留了两个特征图对应位置的较大值),则发送车辆的某些特征将被忽略,从而导致融合后的特征图(图e)不能很好地综合两台车辆的检测效果。

CoFF
公式1中,receiver只关注它自己的感知视野,调整重叠区域特征(来自sender)的权重并融合,不重叠区域的特征保持不变;然后在第二个阶段线性增强特征。


Information-based Spatial Feature Fusion
F1表示接收车辆的特征图,F2表示发送车辆的特征图,为了减少接收车辆特征图中弱特征带来的负面影响,避免发送车辆的强特征不被淹没,因此增加发送车辆特征图的权重。
权重X用来衡量发送车辆的特征图对接收车辆贡献的新语义信息的多少。

发送车辆和接收车辆的特征图重叠区域内的特征是相似的,因为它们是由相同的物理区域生成的。
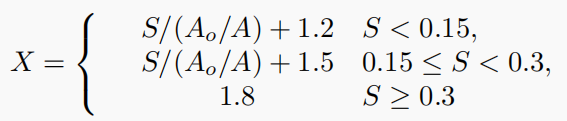
- 在F1和F2的重叠区域内,特征距离(对应特征的欧式距离之和,即 ∣ ∣ F 1 − F 2 ∣ ∣ 2 ||F1-F2||_2 ∣∣F1−F2∣∣2)越大,则表示F2提供的新语义信息越多;
- F1和F2的重叠区域越大(W×H),说明发送车辆和接收车辆之间的物理距离越近,F2提供的新语义信息就越少。(其中 S = ∣ ∣ F 1 − F 2 ∣ ∣ 2 / ( W × H ) S=||F1-F2||_2 / (W×H) S=∣∣F1−F2∣∣2/(W×H))
- 重叠区域与覆盖区域之比(即IoU, A 0 / A A_0/A A0/A)越大,也表示两个特征图重叠程度越高(探测的范围越相似,也就是距离越近),F2提供的新语义信息就越少。
两个影响因素:两台车辆检测范围的相似程度;相同检测范围内特征的相似程度。
上述公式中的常数是通过实验确定的。
Feature Enhancement
首先,存在一个二分类器,可以分离出目标(包含远距离目标和被遮挡的目标)特征和背景特征;
然后,
F
i
F_i
Fi表示融合后的特征图,将其线性增强;由于背景特征总是为0,乘上任何数也不会发生变化,因此该特征增强方法只增大了目标特征值,背景特征值没有变化,即扩大了目标特征值和背景特征值之间的差异,使得在后续目标检测中(RPN)可以提高目标被检概率。

增强参数Y需要一定的主观经验。
点云beam越稠密(点云数据质量越高),则特征需要增强的幅度越低,Y值越小。
交通拥挤时,即遮挡物多时,这时检测目标反射的信号较弱,其目标特征需要增强,Y值较大。
为了避免特征过分增强,即使得背景特征也被模型认定为目标,通常预设
Y
≤
5
Y \le 5
Y≤5。















 134
134











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









