






【电机控制】七段式SVPWM扇区、矢量作用时间计算——对比simplefoc与Ti例程
文章目录
前言
【电机控制】直流有刷电机、无刷电机汇总——持续更新
使用工具:
1.得力万用表
提示:以下是本篇文章正文内容,下面案例可供参考
一、simplefoc——通过角度找扇区
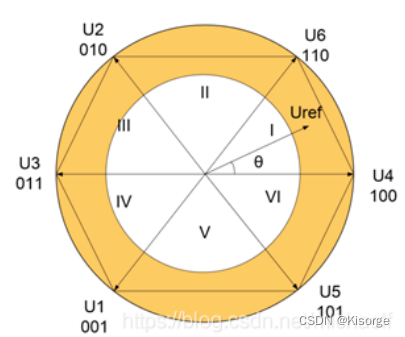
1.通过角度找扇区理论
1.通过角度找扇区
2.矢量作用时间计算
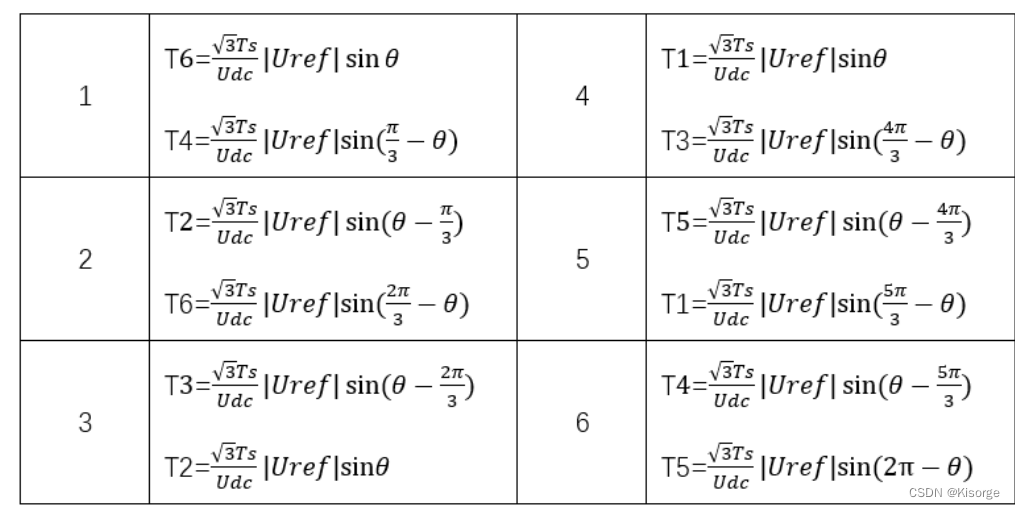

Udc表示电源电压(在代码中是voltage_limit),Uref表示设置的力矩大小(在代码中是target_voltage),Ts表示PWM周期(代码中没有把Ts体现出来,代码中的T1、T2是周期的百分比)。
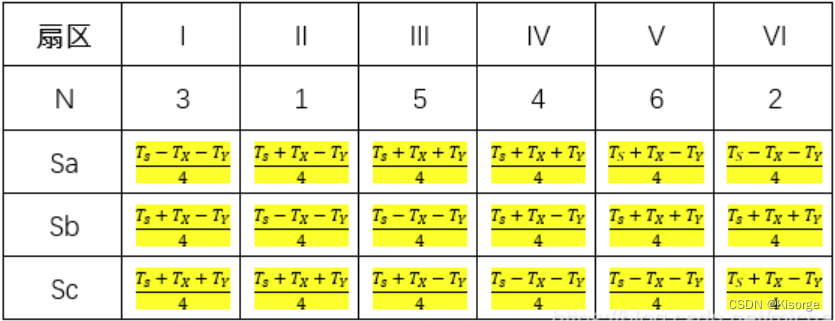
3.矢量切换时间计算——七段式
与下列TI计算的七段式相同,不同的是TI做了优化处理
2.simplefoc代码
sector = (angle_el / _PI_3) + 1;
T1 = _SQRT3*_sin(sector*_PI_3 - angle_el) * Uout;
T2 = _SQRT3*_sin(angle_el - (sector-1.0)*_PI_3) * Uout;
T0 = 1 - T1 - T2;
// calculate the duty cycles(times)
switch(sector)
{
case 1:
Ta = T1 + T2 + T0/2;
Tb = T2 + T0/2;
Tc = T0/2;
break;
case 2:
Ta = T1 + T0/2;
Tb = T1 + T2 + T0/2;
Tc = T0/2;
break;
case 3:
Ta = T0/2;
Tb = T1 + T2 + T0/2;
Tc = T2 + T0/2;
break;
case 4:
Ta = T0/2;
Tb = T1+ T0/2;
Tc = T1 + T2 + T0/2;
break;
case 5:
Ta = T2 + T0/2;
Tb = T0/2;
Tc = T1 + T2 + T0/2;
break;
case 6:
Ta = T1 + T2 + T0/2;
Tb = T0/2;
Tc = T1 + T0/2;
break;
default: // possible error state
Ta = 0;
Tb = 0;
Tc = 0;
}
TIM_SetCompare1(TIM2,Ta*PWM_Period);
TIM_SetCompare2(TIM2,Tb*PWM_Period);
TIM_SetCompare3(TIM2,Tc*PWM_Period);
3.解读simplefoc代码
1.通过角度找扇区
sector = (angle_el / _PI_3) + 1;
2.矢量作用时间计算
T1 = _SQRT3*_sin(sector*_PI_3 - angle_el) * Uout;
T2 = _SQRT3*_sin(angle_el - (sector-1.0)*_PI_3) * Uout;
T0 = 1 - T1 - T2;
switch(sector)
{
case 1:
Ta = T1 + T2 + T0/2;
Tb = T2 + T0/2;
Tc = T0/2;
break;
case 2:
Ta = T1 + T0/2;
Tb = T1 + T2 + T0/2;
Tc = T0/2;
break;
case 3:
Ta = T0/2;
Tb = T1 + T2 + T0/2;
Tc = T2 + T0/2;
break;
case 4:
Ta = T0/2;
Tb = T1+ T0/2;
Tc = T1 + T2 + T0/2;
break;
case 5:
Ta = T2 + T0/2;
Tb = T0/2;
Tc = T1 + T2 + T0/2;
break;
case 6:
Ta = T1 + T2 + T0/2;
Tb = T0/2;
Tc = T1 + T0/2;
break;
default: // possible error state
Ta = 0;
Tb = 0;
Tc = 0;
}
二、TI——通过Uα、Uβ找扇区
1.通过Uα、Uβ找扇区理论
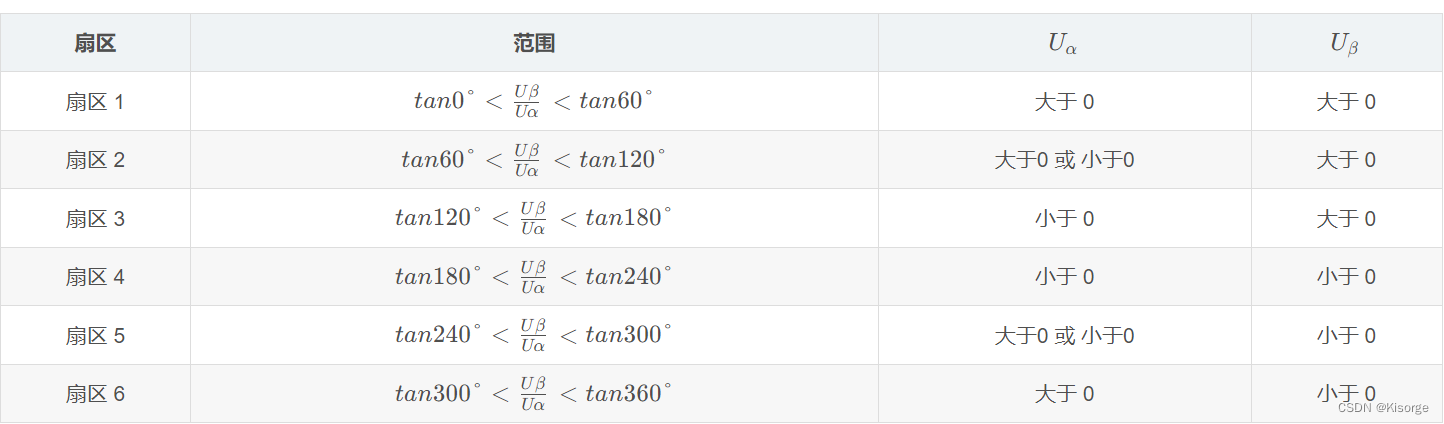
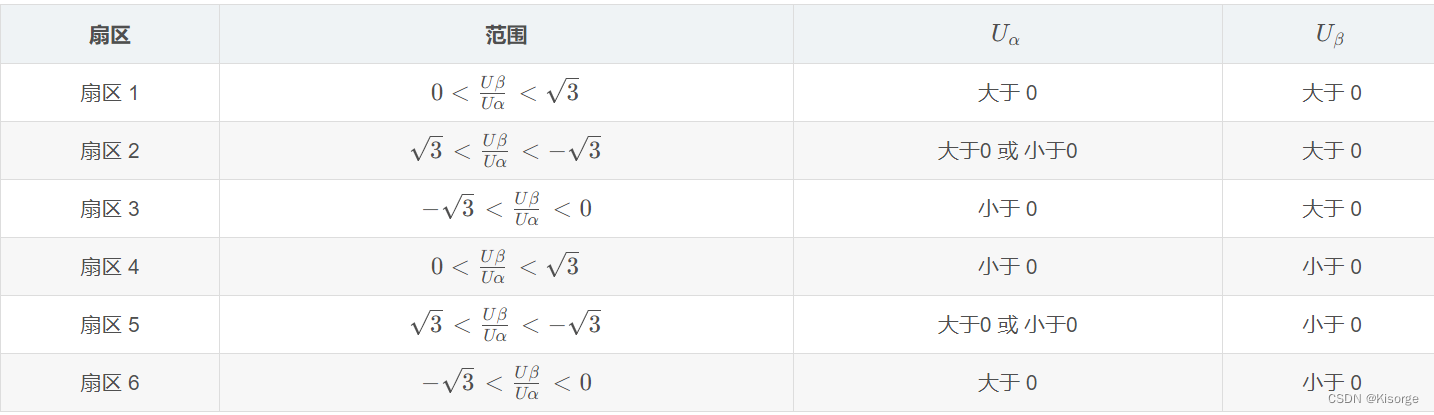
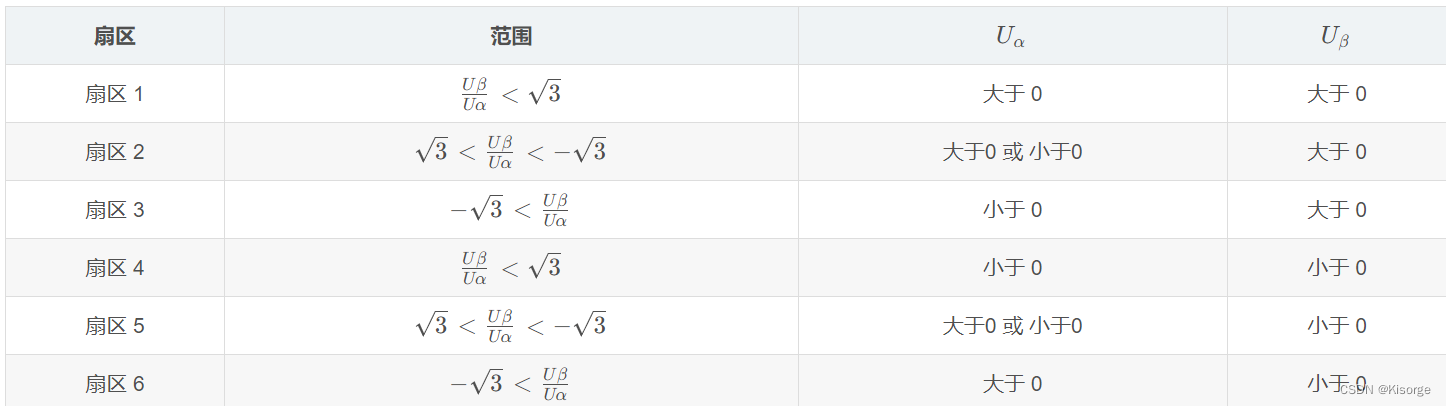


若A、B、C、任意一个不等式大于0,则为1,反之则为0

2.TI代码
void SVPWM_Gen(SVGEN *v)
{
v->tmp1= v->Ubeta;
v->tmp2= _IQdiv2(v->Ubeta) + _IQmpy(_IQ(0.866),v->Ualpha);
v->tmp3= v->tmp2 - v->tmp1;
v->VecSector=3;
v->VecSector=(v->tmp2> 0)?( v->VecSector-1):v->VecSector;
v->VecSector=(v->tmp3> 0)?( v->VecSector-1):v->VecSector;
v->VecSector=(v->tmp1< 0)?(7-v->VecSector) :v->VecSector;
if(v->VecSector==1 || v->VecSector==4)
{
v->Ta= v->tmp2;
v->Tb= v->tmp1-v->tmp3;
v->Tc=-v->tmp2;
}
else if(v->VecSector==2 || v->VecSector==5)
{
v->Ta= v->tmp3+v->tmp2;
v->Tb= v->tmp1;
v->Tc=-v->tmp1;
}
else if(v->VecSector==3 || v->VecSector==6)
{
v->Ta= v->tmp3;
v->Tb=-v->tmp3;
v->Tc=-(v->tmp1+v->tmp2);
}
else
{
v->Ta=0;
v->Tb=0;
v->Tc=0;
}
}
3.解读TI代码
1.ABC赋值
v->tmp1= v->Ubeta;
v->tmp2= _IQdiv2(v->Ubeta) + _IQmpy(_IQ(0.866),v->Ualpha);
v->tmp3= v->tmp2 - v->tmp1;
这里TI开始进行优化,将传统的ABC稍作修改,
其中,A不变,为Uβ;
B为二分之根号三Uα+二分之一Uβ;
C为二分之根号三Uα-二分之一Uβ
2.找扇区
找扇区的方式也与传统的N=4C+2B+A不一样
先将其赋值为3再做判断
v->VecSector=3;
v->VecSector=(v->tmp2> 0)?( v->VecSector-1):v->VecSector;
v->VecSector=(v->tmp3> 0)?( v->VecSector-1):v->VecSector;
v->VecSector=(v->tmp1< 0)?(7-v->VecSector) :v->VecSector;
若A<0,则7-N,反之不变
若B>0,则N-1,反之不变
若C>0,则N-1,反之不变
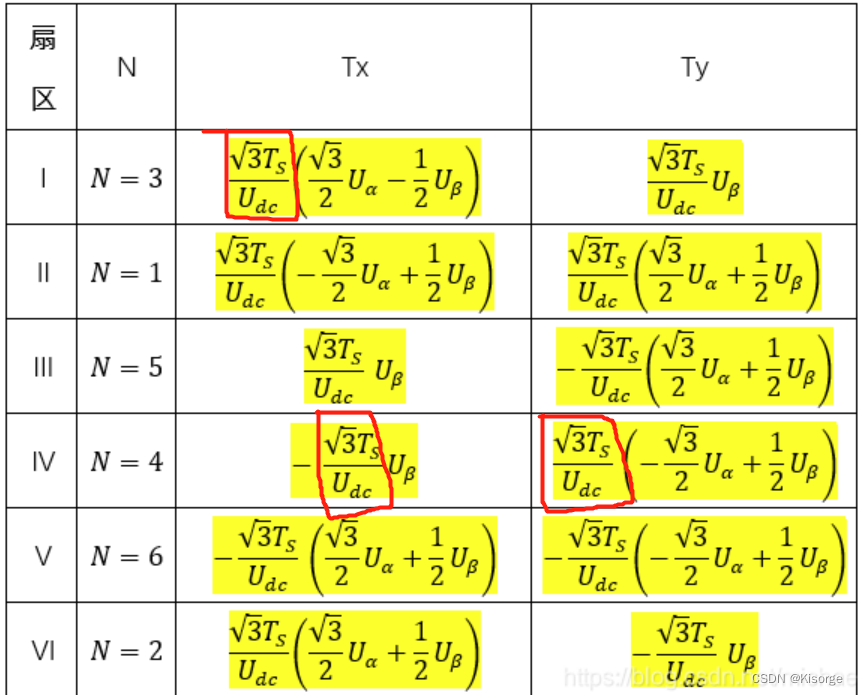
3.矢量作用时间计算
这里也与传统的计算不同,舍弃掉了根号三*Ts/Udc
我们只看第一扇区与第四扇区,将画圈部分舍弃
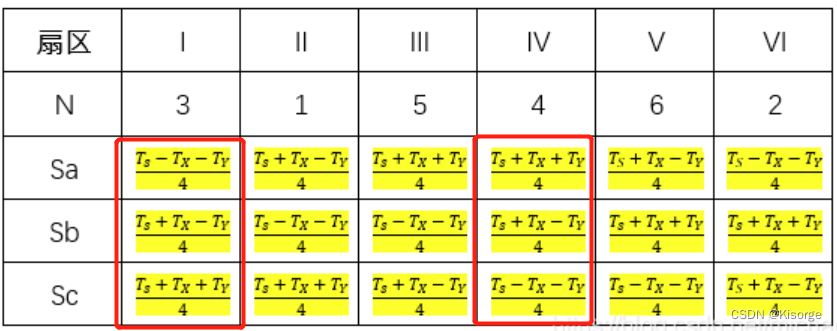
4.矢量切换时间计算——七段式
将剩余部分的Tx与Ty代入到下列公式,下列公式也需要将Ts去掉,除以4去掉,再取反
例如:
第一扇区
Sa=Tx+Ty=根号三/2Uα+1/2Uβ=B
Sb=-Tx+Ty=3/2Uβ-根号三/2Uα=A-B
Sc=-Tx-Ty=-B
第四扇区
Sa=-Tx-Ty=根号三/2Uα+1/2Uβ=B
Sb=-Tx-Ty=3/2Uβ-根号三/2Uα=A-B
Sc=Tx+Ty=-B
此时,我们会发现,第一扇区与第四扇区的矢量作用时间的计算是一样的,也就是说,TI工程师是将ABC处赋值做了处理,对算法进行了优化。
我在这里举例第一扇区与第四扇区,同理可得第二扇区与第五扇区,第三扇区与第六扇区。
if(v->VecSector==1 || v->VecSector==4)
{
v->Ta= v->tmp2;
v->Tb= v->tmp1-v->tmp3;
v->Tc=-v->tmp2;
}
三、参考文章
SVPWM分析、各个扇区详细计算以及Matlab仿真
FOC - SVPWM扇区判断
如何在TI官网上寻找DSP的例程
[问答] F28335电机矢量控制例程,svpwm生成中的一个问题如何解答
基于TMS320F28335的五段式和七段式SVPWM实现方法
总结
本文仅仅简单介绍了【电机控制】七段式SVPWM扇区、矢量作用时间计算——对比simplefoc与Ti例程,评论区欢迎讨论。



















 855
855

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











