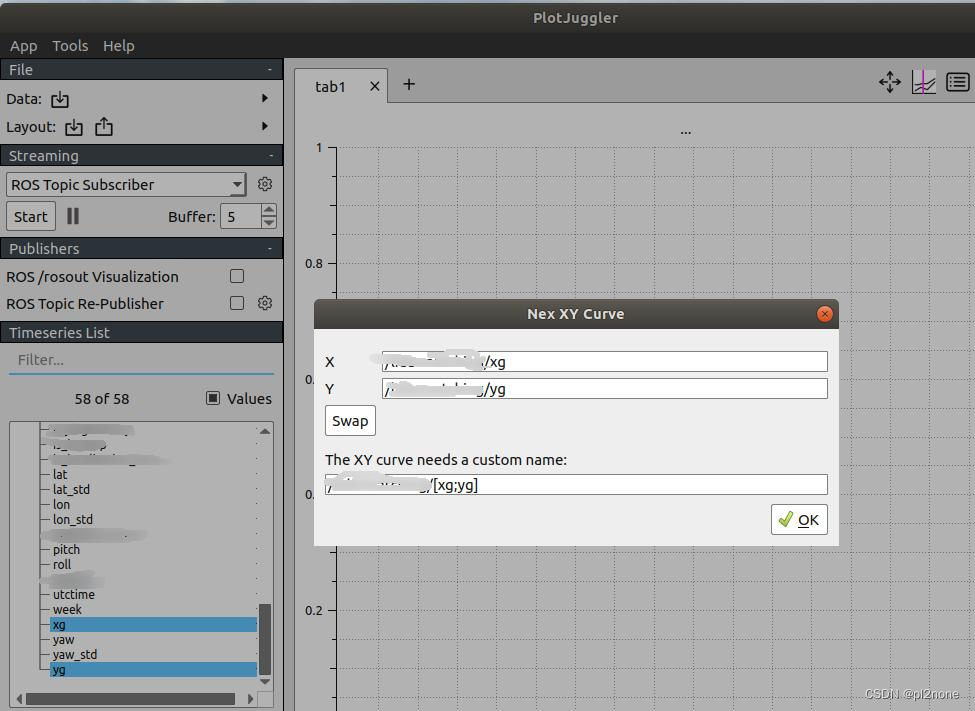
plotjuggler - ROS Wiki 1.官网最下方有动图演示,耐心观看,第二个绘图即为二维轨迹绘画 2.plotjuggler 二维轨迹绘画: 选中两个信号(按ctrl跳选),右键拖至tab界面即可







 PlotJuggler是一个强大的可视化工具,其官网的动图展示了如何使用它来创建二维轨迹动画。用户可以通过选择并拖放两个信号到tab界面,轻松地绘制出ROS数据的轨迹图形。Ctrl键可用来多选信号,方便快捷。
PlotJuggler是一个强大的可视化工具,其官网的动图展示了如何使用它来创建二维轨迹动画。用户可以通过选择并拖放两个信号到tab界面,轻松地绘制出ROS数据的轨迹图形。Ctrl键可用来多选信号,方便快捷。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 1万+
1万+





