










车道感知多样化轨迹预测的分治策略
原文链接:
研究背景
多项选择学习的目标(WTA) 初始化存在不稳定性,如何正确捕捉数据分布?
结合驾驶规则的栅格化图像或高清地图无法保证强语义耦合
锚点创建过程随时间推移回增加计算复杂性且高度依赖场景,泛化性差
研究问题
多模态输出:除了预测最主要的模态,次要模态需要纳入考虑
模型需要分解合理的输出空间,并为给定数量的样本提供不同的未来
如何通过驾驶知识约束实现更好的预测?
解决方案
DAC为WTA提供了稳定的初始化,解决了伪模式相关问题,在每个阶段捕获部分数据的假设集
轨迹预测框架ALAN使用现有的中心线作为锚点,提供强语义耦合的上下文感知输出
DAC:解决了伪模式问题,保留每个输出假设的泰森图区域来获取数据 2h将M个假设分成k个集合,用argmin输出更新集合。k从1开始创建一棵二叉树,树的深度依赖于输出假设m的数量。Depth代表指在当前训练阶段可以达到的最大深度
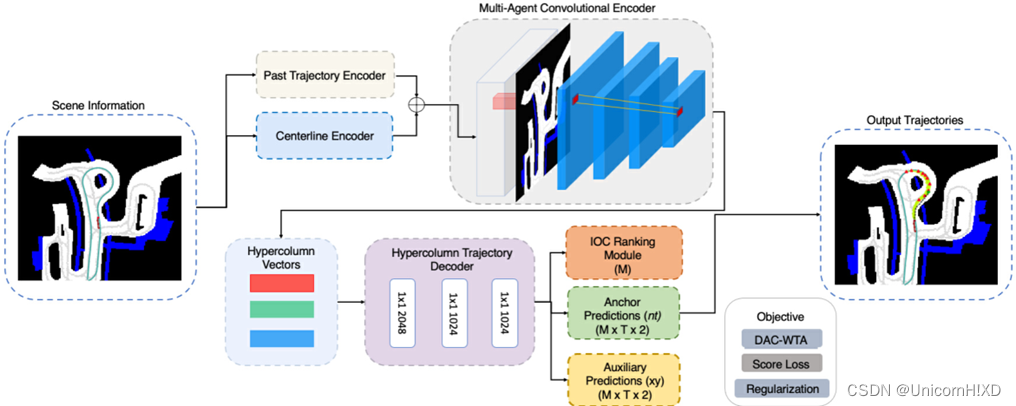
ALAN:该方法以过去轨迹、车道锚和BEV图为输入,一次性对所有智能体进行多假设预测。该方法由5个主要组件组成:
a)中心线编码器--通过一系列卷积对每个agent的输入车道怕信息进行编码,为每个agent产生一个嵌入向量
b)过去轨迹编码器--除了道路锚点,还通过MLP嵌入时间输入,通过LSTM网络提供一个过去状态向量
c)多智能体卷积交互编码器--实现多智能体在正向传递中对轨迹的预测,首先根据agent特定信息生成场景状态图,然后将其与BEV激活。
d)超列轨迹解码器--通过解码器生成多个假设
e)基于逆最优控制(IOC)的排序模块--衡量预测假设的好坏
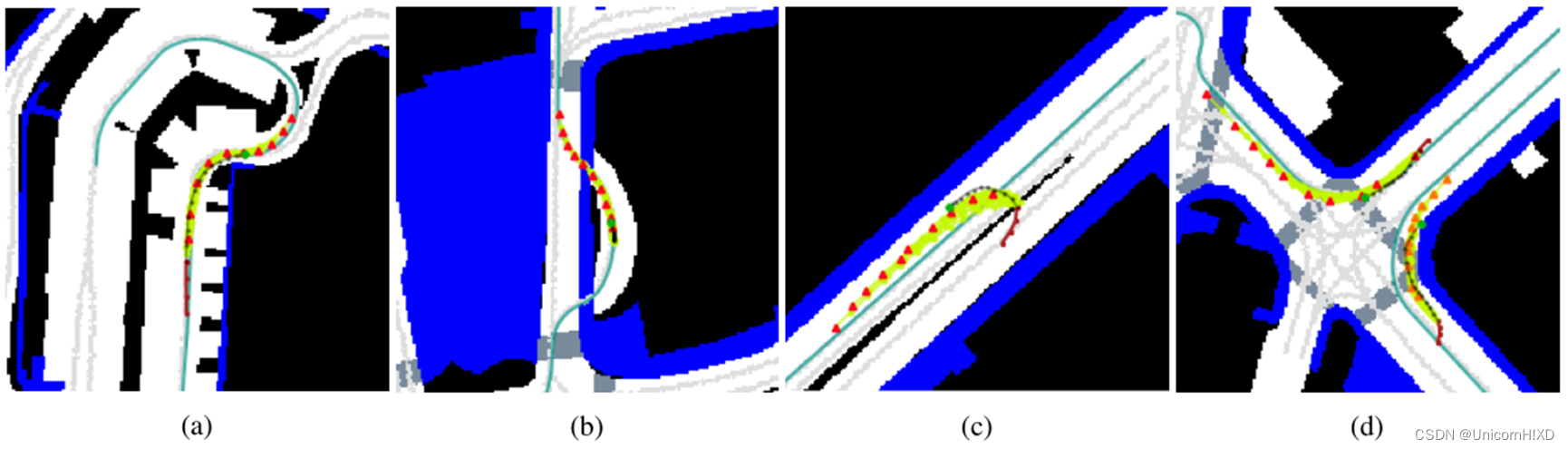
(a)和(b)显示了沿复杂车道结构的预测。基于锚的预测是有益的,特别是对于更长的预测视界,因为轨迹的复杂性增加,锚可以帮助遵循语义。(c)当兴趣车道在相反方向时,用适当的动力学预测u型转弯;(d)展示了一个多智能体预测场景。
效果
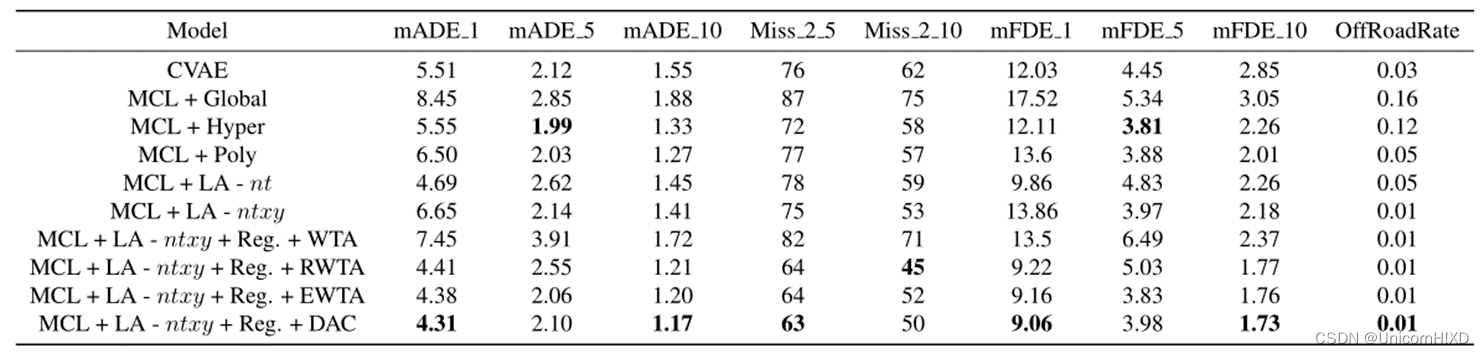
在NuScene数据集证实DAC可以产生不同的预测
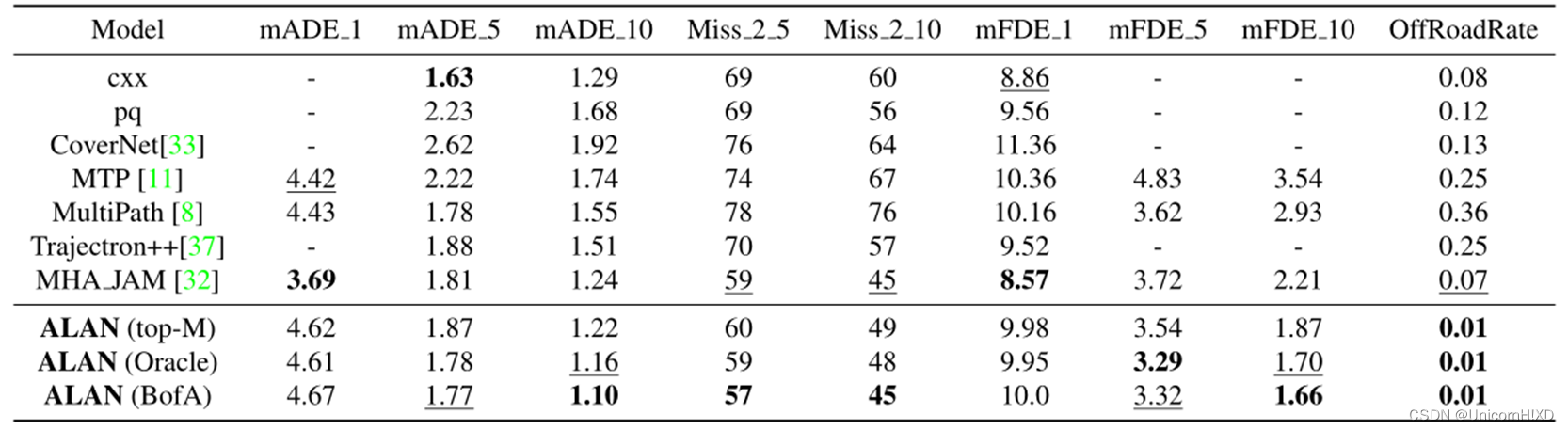
ALAN在几个性能指标上优于SOTA
Divide-And-Conquer (DAC)方法能产生WTA(winner-takes-all)目标函数较好的初始化。提出一个trajectory prediction framework,起名ALAN,采用存在的车道中心线作为锚点提供输入车道限制的轨迹输出。其中设计一个简单representational model,基于定义的hypercolumn descriptors,对交互进行编码。最后,基于一个Inverse Optimal Control based ranking module,给出排序的预测轨迹。















 291
291











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









