






 本文提供了nuScenes数据集的下载和安装步骤,强调了必须使用版本1.1.6的nuscenes-devkit以及在遇到地图文件缺失问题时如何解决。在安装过程中,包括切换到正确的Python版本,创建和激活虚拟环境,以及确保所有必要文件的完整。遵循这些提示,可以成功避免下载和配置过程中的常见错误。
本文提供了nuScenes数据集的下载和安装步骤,强调了必须使用版本1.1.6的nuscenes-devkit以及在遇到地图文件缺失问题时如何解决。在安装过程中,包括切换到正确的Python版本,创建和激活虚拟环境,以及确保所有必要文件的完整。遵循这些提示,可以成功避免下载和配置过程中的常见错误。
本文主要介绍如何下载nuScenes数据集及如何避免潜在的问题,尽量帮助大家避坑
官网:https://www.nuscenes.org/nuscenes#data-format
关于该数据集介绍大家可以参考这篇文章,讲的还是很全面的 :nuScenes 数据集
安装
#下载
cd && git clone https://github.com/nutonomy/nuscenes-devkit.git
#安装python
sudo apt install python-pip
sudo add-apt-repository ppa:deadsnakes/ppa
sudo apt-get update
sudo apt-get install python3.7
sudo apt-get install python3.7-dev
#虚拟环境
conda create --name nuscenes python=3.7
conda activate nuscenes
#第一个坑:版本一定要 >=1.1.6 !!
pip install nuscenes-devkit==1.1.6
#否则后续做预测 import nuscenes.eval.prediction.splits
#或 nuscenes.prediction.* 都会失败第一个坑:数据下载:
clone nuscenes-devkit-master之后,需要自己下载数据集,建议选择 v1.3版本
在map_api.py文件中,使用1.3版本解压后就可以直接调用,不需要再自己建立文件夹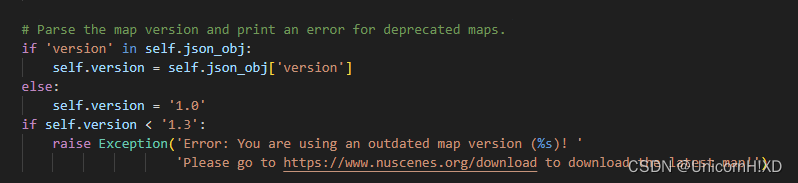
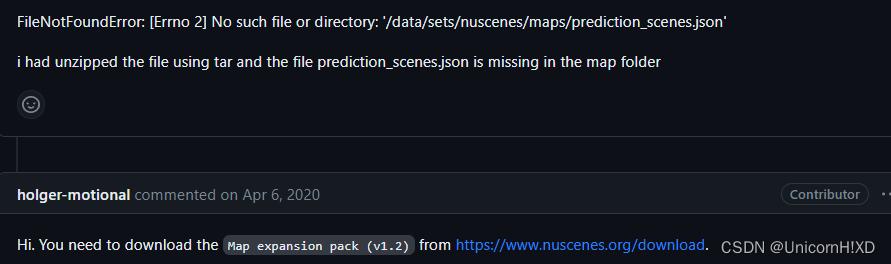
第二个坑:遇到 “No such file or directory: '/data/sets/nuscenes/maps/prediction_scenes.json ” 问题
原因:缺少这个文件,除了map文件外,还要下载上述 Map expansion v1.3 文件,直接在nuscenes文件内解压即可

以上是我遇到的两个问题,按照这个方法都可以解决,有其他问题的话可以再讨论
正确操作后,文件夹内如下:
/data/sets/nuscenes
samples - Sensor data for keyframes.
sweeps - Sensor data for intermediate frames.
maps - Folder for all map files: rasterized .png images and vectorized .json files.
v1.0-* - JSON tables that include all the meta data and annotations. Each split (trainval, test, mini) is provided in a separate folder./data/sets/nuscenes/maps
basemap
expansion
prediction预测代码
代码详情:https://www.nuscenes.org/tutorials/prediction_tutorial.html
具体内容后续更新

















 765
765

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









