






点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达1. 感知机模型
给定训练样本集

令
若存在超平面,使下面等式成立:

若某一样本满足超平面不等式:

则该样本为正样本;
若另一样本满足平面不等式:

为了简化该模型,我们使用向量x表示样本,向量w表示参数,并用sign函数表示不等式,则有:

函数sign(x)的含义为:
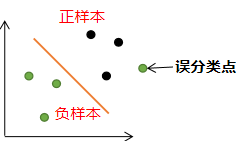
上述这一模型就是我们熟知的感知机模型,如下图:

2. 感知机模型的损失函数
若我们知道了感知机模型的超平面,我们定义误分类点到超平面的距离为该样本点的损失函数。
误分类点的含义为感知机模型错误分类的点,如下图:
误分类点满足下式:

误分类样本的损失函数为该样本点到超平面的距离:
我们发现,当分子参数 w 增加N倍时,分母参数的L2范数也会相应的增加N倍,因此误分类样本可以简化为:

损失函数为误分类点到超平面的距离之和:

3. 感知机模型损失函数的优化过程
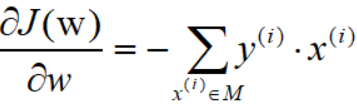
由上节可知,损失函数为误分类点到超平面的距离之和:

损失函数相对于参数w的偏导数为:
梯度下降法更新模型参数:
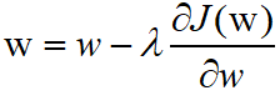
即:
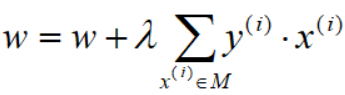
其中λ为学习率。
梯度下降法迭代过程中止条件:当参数 w 迭代过程中,没有任何的误分类点,则迭代结束。
4. 感知机模型的算法对偶形式
若样本容量为N,每一个样本的迭代次数为 ,模型参数的初始值为0,由梯度下降法可得:
,模型参数的初始值为0,由梯度下降法可得:
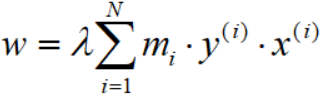
我们容易知道正确分类样本的迭代次数等于0。
令
有:
上式就是参数 w 的表达式。
对于某一个样本 ,若:
,若:
则该样本为误分类点,需要用梯度下降法更新参数。
若:
则该样本为正确分类的点,不需要更新参数。
为了加快算法运行速度,我们首先计算每个样本间的Gram矩阵,在感知机对偶形式的内积计算时直接调用Gram矩阵的元素,节省了样本内积计算的时间。
5.感知机分类模型的缺点
感知机模型的超平面不是唯一的,超平面与误分类点的计算顺序、初始值以及学习率相关,如下两个超平面,都能使损失函数等于0。

分类模型肯定会有最佳的超平面,感知机模型不能得到最优超平面,支持向量机在感知机模型的基础上得到最优超平面,下节将介绍支持向量机。
参考:
https://www.cnblogs.com/pinard/p/6042320.html
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
















 464
464











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









