







基于Deeplabv3+的河岸线分割软件
本章内容参考文章《基于Deeplabv3+城市街道分割算法》。数据集使用的是USVInland河岸线分割数据集,如图1所示。USVInland数据集是首个针对内陆水道无人水面船只的多传感器数据集,这个数据集由欧卡智舶联合清华大学与西北工业大学的研究学者共同发布,旨在推动无人船及水面自动驾驶领域相关研究的发展

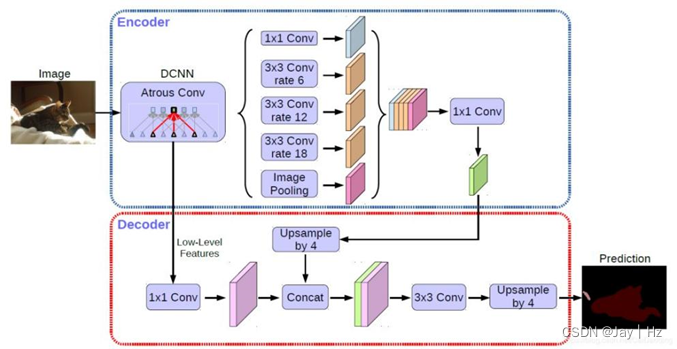
基础算法为Deeplabv3+,如下图所示。源代码中在原始Deeplabv3+的基础上使用mobilenetv3替换backbone,并且加入了ASFF结构,大幅降低参数量的同时,精度略微下降一点。
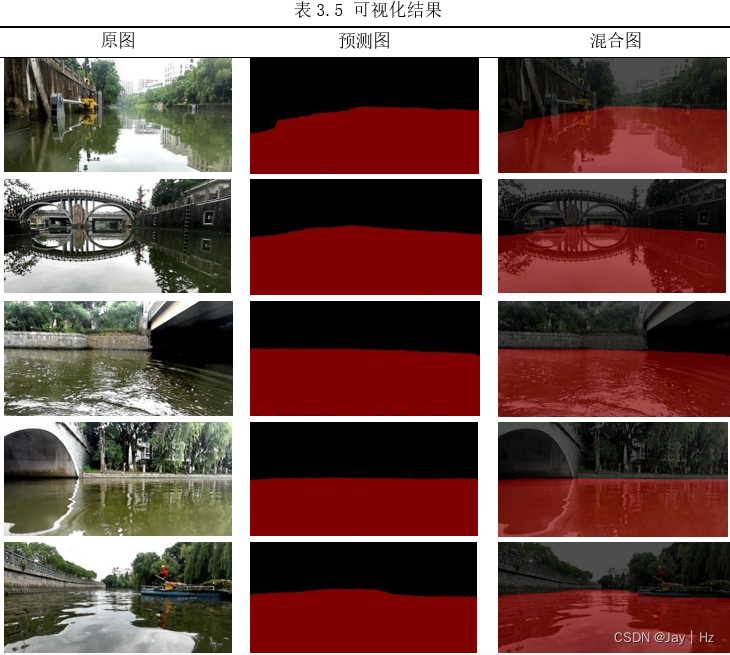
使用pyside6进行界面开发,可选择单张图片或者整个文件夹进行推理。其中“mix”表示输出结果为原图和mask图像混合。“mask”表示输出结构直接为mask。源码是基于pytorhc训练,部署则是通过onnxruntime进行,可在cpu端实现实时推理。
“mix”模式

“mask”模式

整个项目的工作量完全够写毕设了,有兴趣的小伙伴可以尝试复现,或者点击该链接。















 1249
1249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









