







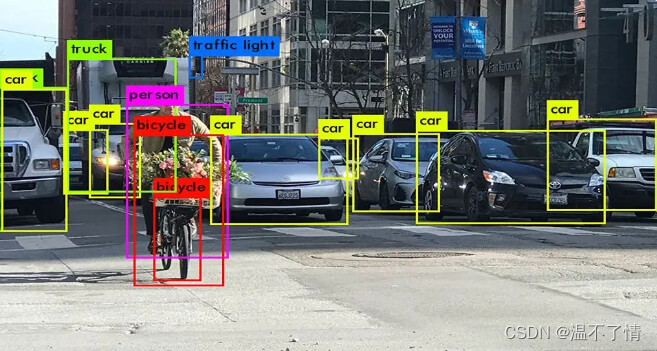
物体检测作为计算机视觉领域的热门方向,在学术界和工业界可谓是遍地开花,而Yolo系列则可以称为该方向的经典算法,从YoloV1到YoloV7的更新迭代,Yolo算法给我们带来了很多的惊喜和灵感。面试人工智能岗位,Yolo模型的出镜率也是非常的高,今天我们就来捋一捋Yolo那些值得关注的改进点。
资料已经整理好了,文末附下载方式!以下是详细内容介绍~
YoloV1以单阶段端到端的模型让人眼前一亮,检测问题转换成回归问题,预测速度可达到实时要求。模型采用grid cell的网格负责制,每个网格预测两个候选框,再结合置信度、NMS策略得到最终输出结果,损失函数分为四部分。
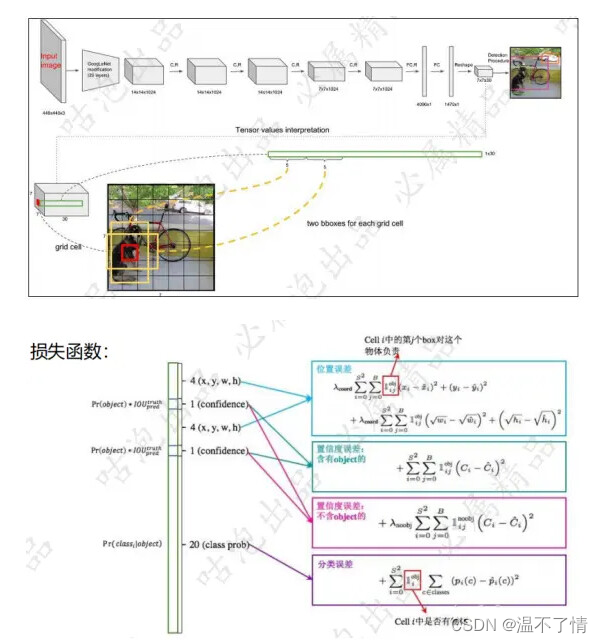
存在的问题主要有两方面:
一是:每个cell只预测一个类别,如果目标重叠则会漏检;
二是:由于boundingbox的限制,对小目标或是新的宽高比的目标检测效果较差。
YoloV2在V1基础上做了很多改进:
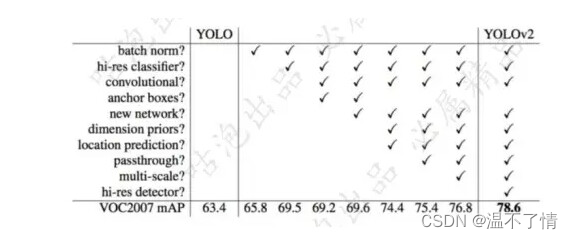
(1)采用Darknet-19作为新的骨干网络,小卷积核节省参数;

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 384
384











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









