












Linux中用 pwd 命令来查看”当前工作目录“的完整路径。 简单得说,每当你在终端进行操作时,你都会有一个当前工作目录。
cd cd…(上一级)
mkdir创建文件夹
touch创建文件(类似于txt)
mkdir新建文件夹
mv(剪切功能)mv source_file destination_file
cp(复制功能) cp source_file /home/copy_file
rm(删除文件)
rm -r (删除文件夹)
sudo apt-get update(更新系统的列表)
rm --help (帮助指令)
命令 --help

g++ cpp_file.cpp cpp_flie_exe (编译c++)







订阅与发布机制 异步的 话题

服务–同步通信机制


新终端运行rosrun rqt_graph rqt_graph 可以查看节点间的通信关系
rosnode list (rosout启动roscore就有的节点)
rosnode info /huati_name
rostopic list (查看话题)
发布话题
rosmsg show geometry_msgs/Twist 查看消息类型
rosservice list
rosservice call /服务名
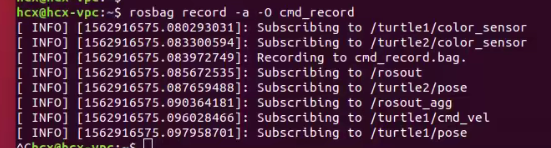
话题记录 rosbag record -a -O cmd_record
-a表示所有 -O表示生成二进制文件 cmd_record为生成的二进制文件名






ctrl + h 可以查看 .bashrc文件
python文件在scripts里面

//话题的订阅



自定义消息类型
msg文件夹 person.msg

在devel里面生成.h文件




rosrun tf tf_echo base1 base2 两个坐标系之间的关系
rosrun rviz rviz 可视化界面
创建tf功能包


重映射机制

name为节点
roslaunch

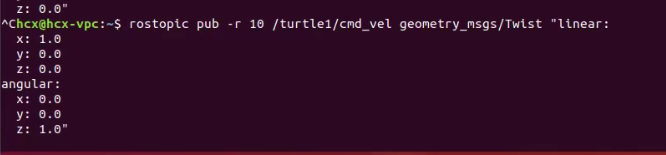
rostopic pub
这条命令将会发布消息到某个给定的话题。
单个破折号)这个参数选项使rostopic发布一条消息后马上退出。
/turtle1/command_velocity
这是消息所发布到的话题名称。
turtlesim/Velocity
这是所发布消息的类型。
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist – ‘[2.0, 0.0, 0.0]’ ‘[0.0, 0.0, 1.8]’ [表示一赫兹]
rostopic pub [topic] [msg_type] [args]
查看消息类型
rosmsg show geometry_msgs/Twist
















 3893
3893











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









