







V2I-Calib: A Novel Calibration Approach for Collaborative Vehicle and Infrastructure LiDAR Systems
论文:pdf
code: code
单位:清华大学
摘要
- 车路协同激光雷达系统具有巨大的潜力,但目前面临着许多挑战。
- 车路协同系统,对激光雷达系统进行标定是确保感知系统数据的准确性和一致性的关键步骤,因此需要实时和稳定的标定方法。
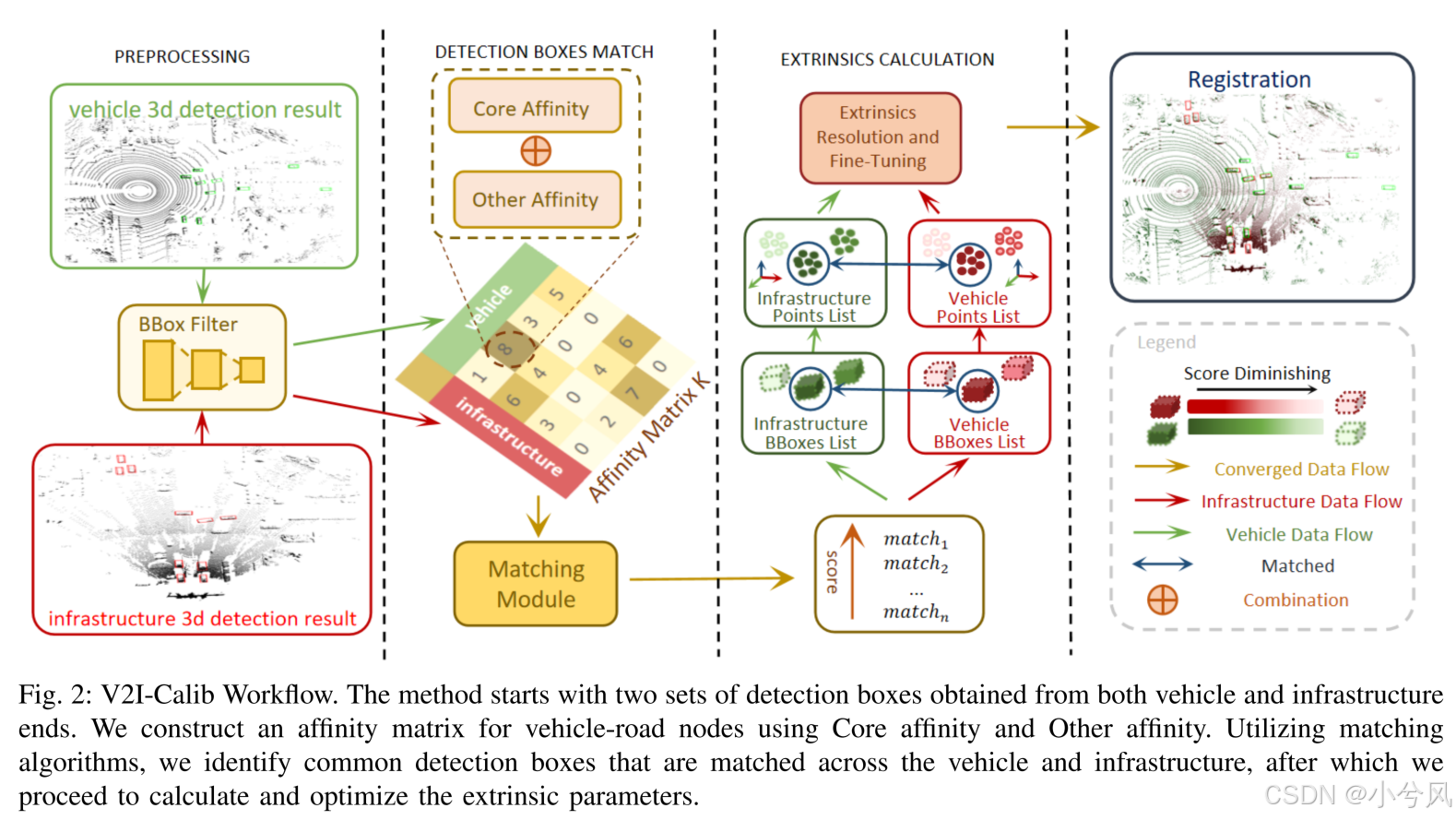
- 为此,本文介绍了一种利用检测框进行空间关联,从而实现车路协同的激光雷达系统的新标定方法。
- 该方法围绕一种新的整体IoU为中心,该指标反映了车辆和基础设施之间目标的相关性,能够实时监测校准结果。
- 本文通过构造一个相似矩阵来寻找车辆和基础设施节点之间的公共检测框
- 随后,对这些检测框进行了外部参数的计算和优化。
- 在DAIR-V2X数据集上进行的比较和消融实验证实了该方法的优越性。
- 为了更好地反映标定结果的差异,我们根据DAIRV2X数据集上的标定任务进行了难度分类,丰富了数据集对未来研究的实用性。
- 我们的项目发布在:https://github.com/MassimoQu/v2i-calib
摘要
- 感知系统是确保自动驾驶汽车安全有效运行的关键
- 车辆与路侧设施(V2I)协作系统可以通过补充车端和路端信息,在复杂交通场景或不利天气条件下提高感知系统的可靠性
- 协同车辆和路边激光雷达系统具有巨大的潜力,但它们的实现面临着许多挑战,特别是在传感器系统的校准方面。
- 跨异构车辆和基础设施端点对激光雷达系统进行校准,是确保感知系统数据的准确性和一致性的重要步骤。
- 这需要高精度的同步和注册技术来集成来自车辆和基础设施的激光雷达数据
- 这不仅涉及到复杂的技术问题,如时间同步、空间对齐和数据融合,但也需要在动态环境中的实时处理能力。
- 为了应对这些挑战,研究界最近看到了新方法的出现
- 这些方法已经成功地解决了协同车辆和基础设施激光雷达系统中的时间同步问题,确保实时数据传输和数据融合的准确性
- 尽管在空间对齐方面取得了进展,但仍存在一些突出的问题,如空间初始值的获取、跨源点云配准所涉及的高计算负荷,或者是与点云映射技术相关的大量初步成本
- 因此,在车辆基础设施协作感知系统的动态环境中实现空间对齐,同时保持低计算开销仍然是一个艰巨的挑战。
- 本文提出了一种新的的校准方法运行的车辆和基础设施激光雷达系统
- 该方法基于整体IoU度量建立了车辆和路边节点的亲和矩阵,能够识别车辆和基础设施端点之间的共享匹配盒。
- 随后,它计算并细化了与匹配的方框相关联的外部参数。
- 该方法有几个优点。
- 首先,该方法不需要初始的外部参数,满足实时运行要求。
- 其次,它利用了交通场景中固有的公共目标信息,增强了其通用性。
- 此外,与[10]相比,它只利用了来自目标检测的感知信息,从而降低了计算复杂度,降低了数据传输成本,从而提供了更大的实际应用潜力。
- 最后,V2I-Calib的设计具有灵活性,其组件很好地解耦,便于适应以满足特定的现实需求。
- 本文的创新内容包括:
- 我们引入了整体外部度量,它监测外部参数的实时校准性能。为此,我们提出了一种构造车辆-道路节点亲和矩阵的方法,编码车辆和路边目标之间的相关性。
- 我们提出了一种合作车辆和基础设施激光雷达系统的校准方法,该方法充分利用了探测盒之间的空间关联,其特征是其独立于初始外部参数值和实时能力。
- 通过在DAIRV2X数据集上的比较和消融实验,验证了我们的方法的有效性,该数据集也根据校准任务的难度级别进行了分类。
- 本文的内容被分为以下几个部分。首先,在第二节中,我们将详细回顾现有的车辆基础设施激光雷达校准方法。随后,在第三节中,我们将详细介绍本文中介绍的校准方法及其组成模块。此外,在第四节中,我们将进行实验来验证我们所提出的方法的有效性。最后,本文将在第五节中进行总结和未来展望。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











