









亲爱的读者们,您是否在寻找某个特定的数据集,用于研究或项目实践?欢迎您在评论区留言,或者通过公众号私信告诉我,您想要的数据集的类型主题。小编会竭尽全力为您寻找,并在找到后第一时间与您分享。

摘要:本文详细介绍了全新提出的无人机视频跟踪数据集 UAV123 及其子集 UAV20L。阐明了创建这一数据集的原因,包括低空无人机捕获视频的独特性。全面描述了数据集的构成、特点、标注信息、下载途径以及如何与视觉跟踪基准集成。通过丰富的数据和精心的设计,该数据集为无人机视频跟踪领域的研究提供了有力支持,并为未来的技术发展奠定了坚实基础。
一、背景
在当今科技飞速发展的时代,无人机(UAV)的应用日益广泛,从航拍、监测到物流配送等领域,都展现出了巨大的潜力。然而,对于无人机捕获的视频进行有效的目标跟踪,仍然面临着诸多挑战。现有的流行跟踪数据集,如 OTB50、OTB100、VOT2014、VOT2015、TC128 和 ALOV300++ 等,无法完全满足无人机视频跟踪的特殊需求。因此,我们提出了全新的数据集 UAV123 以及其用于长期航空跟踪的子集 UAV20L。
二、创建数据集的背景与动机
(一)低空无人机视频的独特性
低空无人机捕获的视频具有与传统跟踪数据集中的视频截然不同的特点。无人机的飞行高度、角度和速度的变化,导致视频中的目标呈现出不同的尺度、视角和运动模式。此外,无人机在飞行过程中可能受到气流、电磁干扰等因素的影响,使得视频的稳定性和画质也有所不同。
(二)现有数据集的局限性
现有的流行跟踪数据集大多是基于地面拍摄或特定场景拍摄的,其视频的特征和模式与无人机捕获的视频存在较大差异。这些数据集在目标的运动规律、背景的复杂性以及光照条件等方面,无法充分反映无人机视频的真实情况。因此,为了推动无人机视频跟踪技术的发展,创建一个专门针对无人机视频的数据集势在必行。
三、UAV123 数据集的详细介绍
(一)数据规模与构成
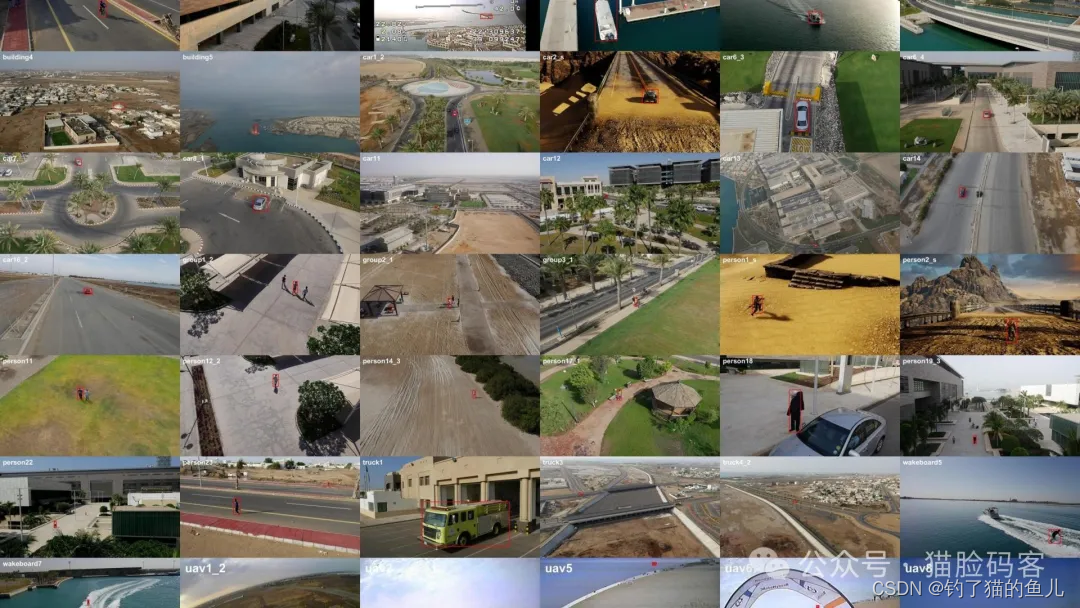
UAV123 数据集包含了总共 123 个视频序列,超过 110K 帧的图像数据,成为仅次于 ALOV300++ 的第二大目标跟踪数据集。如此大规模的数据量为研究人员提供了丰富的样本,有助于训练出更加鲁棒和准确的跟踪模型。
(二)标注信息
所有的视频序列都进行了全面的标注,使用了直立边界框来准确界定目标的位置和范围。此外,还包括了目标的各种属性标注,如目标的形状、颜色、运动速度等,为深入分析和研究目标跟踪算法提供了多维度的信息。
(三)与视觉跟踪基准的集成
UAV123 数据集可以轻松地与现有的视觉跟踪基准集成,这意味着研究人员可以利用已有的跟踪算法和评估指标来对新数据集进行测试和比较。同时,为了适应 UAV123 数据集的特点,我们还对一些配置文件和评估函数进行了修改和优化。
四、UAV20L 子集
(一)长期跟踪的需求
在某些应用场景中,需要对目标进行长期的跟踪和监测,例如对野生动物的迁徙跟踪、对特定区域的持续监控等。因此,我们从 UAV123 数据集中抽取了一部分适合长期跟踪的视频序列,组成了 UAV20L 子集。
(二)子集的特点与应用
UAV20L 子集中的视频序列具有更长的时间跨度和更复杂的目标运动轨迹,对于研究长期跟踪算法的稳定性和适应性具有重要意义。通过对这一子集的研究,可以开发出更具耐力和可靠性的跟踪技术,满足实际应用中的长期跟踪需求。
五、数据的下载与使用
(一)下载途径
为了方便研究人员获取数据,我们提供了多种下载途径,包括 GoogleDrive 和 FTP 服务器。同时,为了确保数据的安全性和完整性,设置了相应的密码(pw: uav123)。
(二)使用说明
在下载数据后,研究人员可以根据提供的文档和配置文件,快速上手并将数据集应用到自己的研究工作中。同时,我们还提供了详细的说明和示例代码,帮助研究人员更好地理解和处理数据。
六、实验结果与分析
(一)在不同数据集上的性能比较
为了验证 UAV123 数据集的有效性和实用性,我们在 UAV123、UAV123_10fps、UAV20L、TC128 和 OTB100 等多个数据集上进行了广泛的实验,并与现有的跟踪算法进行了性能比较。实验结果表明,在 UAV123 数据集上训练的模型在其他数据集上也能够取得较好的泛化性能,同时,针对 UAV123 数据集的特点开发的新算法在该数据集上表现出了显著的优势。
(二)算法的适应性和鲁棒性分析
通过对实验结果的深入分析,我们研究了不同跟踪算法在面对 UAV123 数据集中的各种挑战(如目标的快速运动、遮挡、光照变化等)时的适应性和鲁棒性。这为进一步改进和优化跟踪算法提供了有价值的参考和方向。
七、未来展望
(一)技术的发展趋势
随着无人机技术的不断进步和应用场景的不断拓展,对无人机视频跟踪技术的要求也将越来越高。未来,我们预计将看到更加智能、高效和准确的跟踪算法,能够更好地应对复杂多变的环境和目标特性。
(二)数据集的完善与扩展
为了支持未来技术的发展,UAV123 数据集也将不断完善和扩展。我们将继续收集更多的无人机视频数据,涵盖更广泛的应用场景和目标类型,并对数据进行更加精细的标注和分析。
(三)跨领域的融合与创新
无人机视频跟踪技术的发展将不仅仅局限于计算机视觉领域,还将与其他相关领域如人工智能、机器学习、传感器技术等进行深度融合和创新。这将为解决实际应用中的问题提供更多的可能性和思路。
八、结论
UAV123 数据集及其子集 UAV20L 的提出,为无人机视频跟踪领域的研究注入了新的活力。通过提供大规模、高质量、标注丰富的数据,我们希望能够激发更多的创新研究,推动无人机视频跟踪技术的不断发展和进步,为无人机的广泛应用提供更加可靠和有效的技术支持。
九、数据集地址
关注公众号,回复“第152期”


















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











