









基于麦克风阵列的噪声源定位原理简介
基于麦克风阵列的声源定位算法主要分类如下:

一、 波束形成(Beamforming)
基于最大输出功率的可控波束形成技术Beamforming,其基本思想为将各阵元采集的信号进行加权求和形成波束,通过搜索声源的可能位置来引导波束,修改权值,使传感器阵列的输出信号功率最大。
该方法既可以在时域中使用,也可以在频域中使用。 其在时域中的时间平移等价于在频域中的相位延迟。
在频域处理中,首先使用一个包含自谱和互谱的矩阵,称之为互谱矩阵(Cross-Spectral Matrix, CMS)。在每个感兴趣频率之处,阵列信号处理给出了在每个给定的空间扫描网格点上或每个信号到达方向(Direction Of Arrival, DOA)的能量水平。
因此,阵列表示了一种与声源分布相关联的相应求和后的数量。该方法适用于大型麦克风阵列,对测试环境适应性强。
波束形成的基本工作原理如下所示:

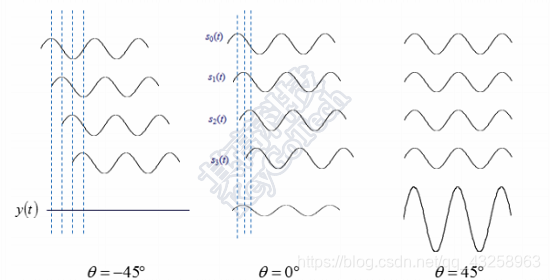
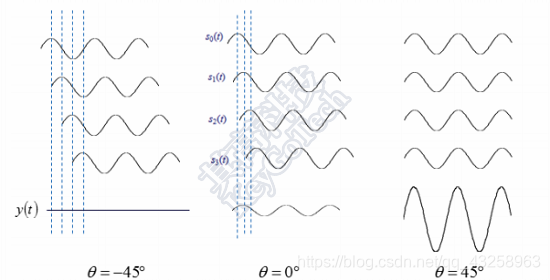
使用波束形成算法,首要条件是远场声源,近场声源用TDOA。远场声源条件下,可以假设入射声波是平行的。
平行的声场,如果入射角度和麦克风平面垂直,则各入射声波能够同时到达阵列中的每个麦克风。如果不垂直,会出现上图现象,即声场到达每个麦克风都有延迟,这个延迟的大小是由入射角度确定的。
同时,在不同的入射角度,叠加出的最终波形强度是不同的。
如
θ
=
−
45
\theta = -45
θ=−45度,几乎没有信号,
θ
=
0
θ=0
θ=0 度,微微有点信号,
θ
=
45
θ=45
θ=45 度,信号达到最强。
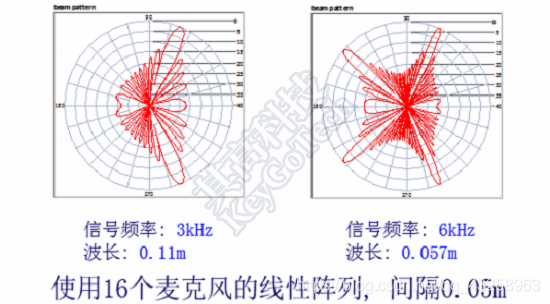
这说明把原来没有极性的单支麦克风组装成一个阵列后,整个阵列是有极性的,可以引出下一个极性图。
极性图表明,每个麦克风阵列都是一个方向阵,方向阵的指向性可以通过时域算法(延迟相加)Delay&Sum实现,通过控制不同的时延Delay,实现不同方向的指向。
方向阵指向可控相当于给了一个空间滤波器,可以先把定位区域进行网格划分,在通过每个网格点的Delay时间对各个麦克风进行时域延迟,最终将所有信号进行叠加,计算出每个网格的声压最终得到每个网格的相对声压。
二、基于高分辨率谱估计的方法
基于高分辨率谱估计的方法包括了自回归 AR 模型、最小方差谱估计(MV)和特征值分解方法(如 Music 算法)等,所有这些方法都通过获取了传声器阵列的信号来计算空间谱的相关矩阵。在理论上可以对声源的方向进行有效估计,实际中若要获得较理想的精度,就要付出很大的计算量代价,而且需要较多的假设条件,当阵列较大时这种谱估计方法的运算量很大,对环境噪声敏感,还很容易导致定位不准确,因而在现代的大型声源定位系统中很少采用。
三、基于声达时延差TDOA方法
声达时间差(TDOA)的定位技术,这类声源定位方法一般分为两个步骤进行:
- 先进行声达时间差估计,并从中获取传声器阵列中阵元间的声延迟(TDOA);
- 再利用获取的声达时间差,结合已知的传声器阵列的空间位置进一步定出声源的位置。
下图解释了 TDOA 的基本工作原理。
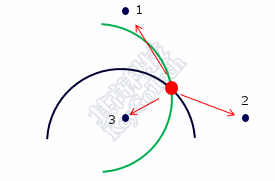
红点是噪声源,黑点是麦克风,噪声源到两个麦(如麦 1,麦 3)的时延是一个常数,通过这个常数,我们可以画出绿色的双曲线,噪声源到麦 3,麦 2 的时延是另一个常数,同样地,我们可以画出黑色曲线,两条曲线相交,就是噪声源的位置。
这种方法的计算量一般比前二种要小,更利于实时处理,但定位精度和抗干扰能力较弱,适合于近场,单一音源,而且不是重复性的信号,如语音信号,微软 XBOX360 的 kinect 的麦阵(4 个间距不等的一维阵)就是典型的 TDOA 算法应用。
四、参考文献
- 《麦克风阵列声音定位解决方案 – 其高科技》. 见于 2021年4月15日. http://www.keygotech.com/cn/solution/ssl/array/noise-source-location-based-on-mic-array.














 1530
1530











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









