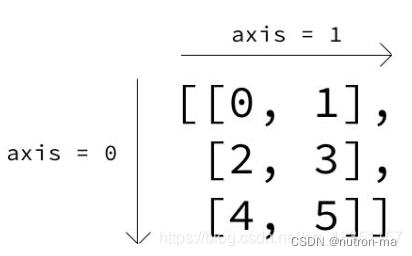
三维数组结构、存储与读取 二维数组中: axis=0 : 跨行操作,得到行 axis=1 : 跨列操作,得到列 arr.shape为(3行,2列),axis=0为行,axis=1为列 三维数组中: arr.shape为(2层,3行,2列),axis=0为层,axis=1为行,axis=2为列










 订阅专栏 解锁全文
订阅专栏 解锁全文















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








