






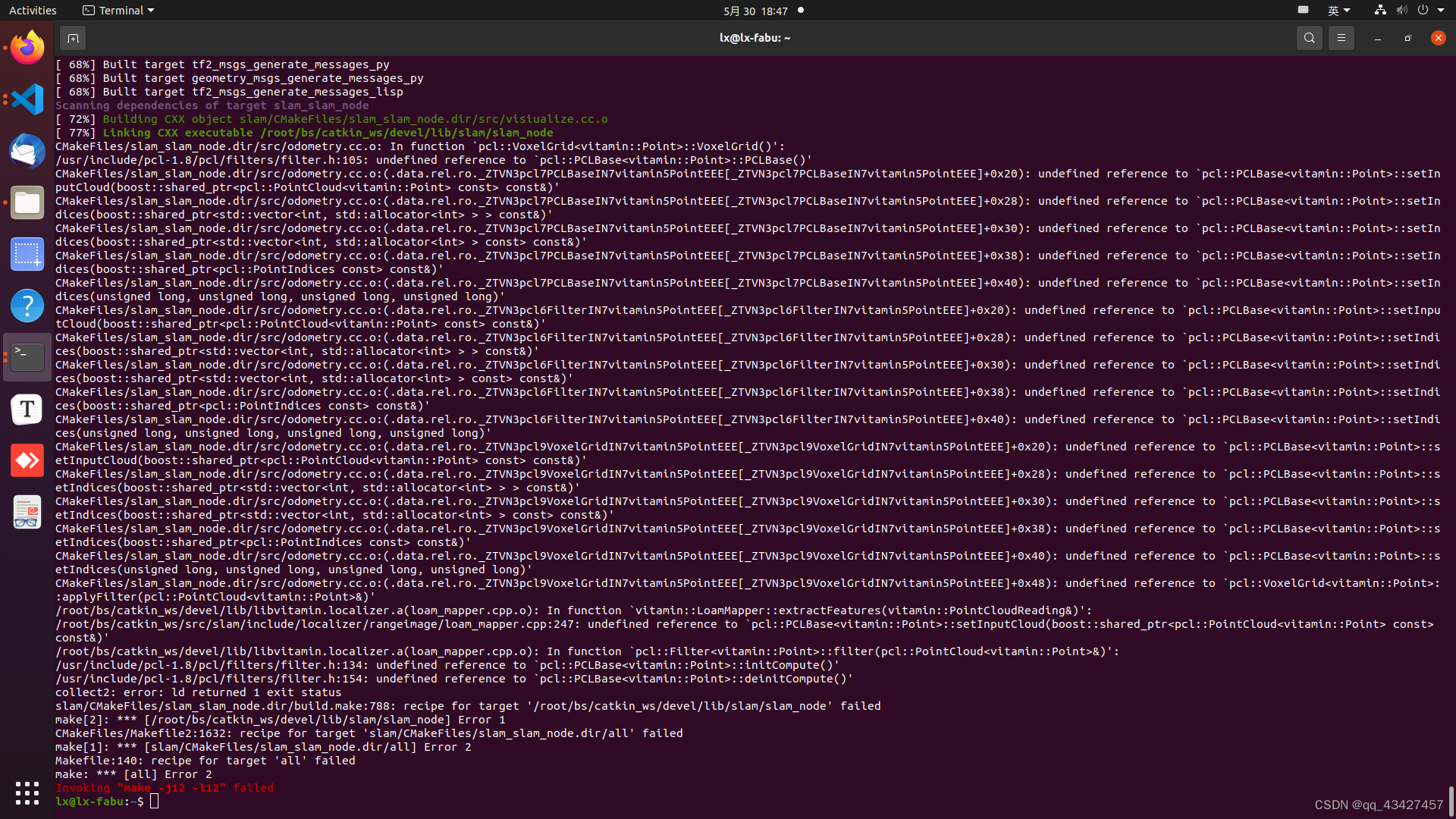
第一反应是链接写错了,没找到库文件,但是makefile折腾半天还是不对。
受这篇博客启发,链接错误不代表没找到库文件,其实就代表没找到定义。类似于header-only lib的情况,还有可能是没找到头文件引起的。遂去pcl头文件下搜索pcl::PCLBase,发现:其实现在pcl/impl/pcl_base.hpp下,而声明在pcl/pcl_base.h。后者并未include前者,而其它文件都是直接include前者。在自定义点云情况下,就没有人include pcl/impl/pcl_base.hpp,自然也就找不到实现了。至于为啥默认定义可以work,就不清楚了。
包含掉它,后边voxel_filter的错误也类似处理,就编译通过了。














 1144
1144











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









