







基于UWB技术的自动跟随避障系统设计研究
摘要:目前我国针对自动跟随避障系统方面的研究较少,同时国内自动跟随避障系统仍然处在未成熟阶段,多数仍停留在应用蓝牙控制或摄像头捕捉这类跟随方式,但这类方式在实际应用过程中往往会出现易受干扰,精度差,易受环境干扰等问题,这不仅会降低自动跟随避障系统的性能,同时也会对用户造成诸多困扰。因此,就需要结合目前较为有效的UWB技术,对自动跟随避障系统进行设计。基于此,本文首先将会针对UWB技术展开概述,而后对基于UWB技术的自动跟随避障系统组成展开分析,进而对基于UWB技术的自动跟随避障系统设计展开研究,以期可以为相关人员提供参考帮助。
关键词:UWB技术;自动跟随避障系统;
近年来随着人工智能的不断普及,促使各类智能化产品也在不断研发与推广,而智能化跟随避障系统研究,也成为现代研究人员重点研究的项目之一。目前传统GPS技术已经成熟,可以针对自动跟随避障系统实现远距离定位需求,但GPS技术在近距离定位方面仍然存在定位精度差的问题。传统跟随采用的传感器如摄像头和超声波等也存在很多实际应用上的问题,而UWB技术既能实现近距离精准定位,也不存在传感器易受干扰的问题,因此,基于UWB技术设计自动跟随系统是最好的选择,此外由于轮式机器人在生产生活中具有结构简单、应用场景广泛、控制简单等特点,所以本系统搭建在自主设计的智能小车上,运用PWM技术对电机进行调速,在系统中增加避障传感器,从而实现整体的自动跟随避障系统设计。
一、UWB技术实现跟随的概述
(1)UWB技术测距的基本原理。
TOF(Time Of Flight飞行时间测距法)主要利用信号在两个异步收发机(Transceiver)之间飞行时间来测量节点间的距离。一对DWM1000 中的发送者发送radio_message1,并记录此时时刻 t1,经过 TOF 时间之后,这对 DWM1000 模块中的接受者收到 radio_message1 后,延时 t_reply 时间后,发送 radio_message2,经过 TOF 时间后,发送者收到 radio_message2,并记录此时时间 t2。计算信号飞行时间和测得距离公式入如下1和2(c为传播速度)。

(2)UWB跟随的基本原理。
通过TOF算法,计算出标签和基站即被跟随目标对于机器人跟随系统的距离,移动跟随机器人上安装有3个UWBLOC跟随模块传感器作为基站,人和机器人处在同样环境中,身上穿戴有一个UWBLOC跟随模块传感器作为标签,假设人初始时刻已被机器人锁定。3个基站按等边三角形三个顶点位置固定在移动机器人上,用来发射UWB信号,标签接收到信号后,通过TDOA算法可算出标签分别距3个基站的距离,并通过几何运算得到人相对于机器人的位置,以机器人本身为参考系建立一个局部坐标系统。如图下图所示,定义3个基站位置距离AB、BC、AC均为a;定义BC边上的高所在延长线为y轴,y轴正向与机器人自身的方向一致;3个基站构成的等边三角形AB边的中点为O(0,0,0);标签坐标为M(x,y,z),其中z为标签到基站所在水平面的高度;等边三角形的中心为H。
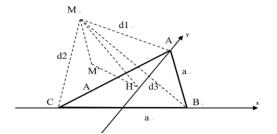
图1:“基站-标签”数学模型图
根据3个基站到标签的距离,通过解析几何可以算出标签M在等边三角形所在平面的投影M点到等边三角形中心的距离:
(3)
标签M在等边三角形所在平面的投影M′点与等边三角形中心H点的连线,即MH与y轴的夹角即方位角:
θ=∠MHA=tan-1 (√3*(d32*-d22)÷(d22+d32-2*d1^2))(4)
获得 L 和θ之后,即可确定人相对与小车的位置,由θ控制小车转向角度, L 控制小车车轮转, 即可实现跟随。
二、基于UWB技术的自动跟随避障系统组成
本系统采用高性能、低功耗处理芯片STM32F103C8T6作为主控器,DC-DC降压模块、电机驱动模块、rm35电机、智能小车组成运动部分,UWB模块跟随部分、漫反射光电传感器避障部分、OLED显示模块构成显示部分,12V探照灯照明部分,完成自动跟随小车控制系统的设计,具体关系如下图。
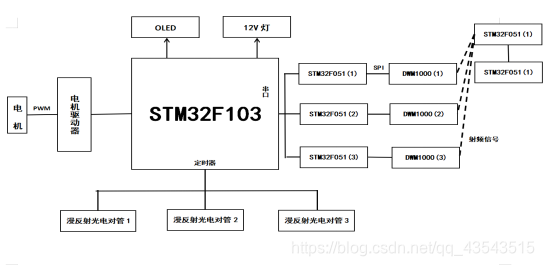
图2:
三、基于UWB技术的自动跟随避障系统设计

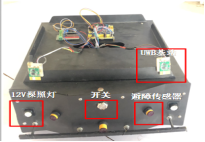
图3:智能车图纸
(1)智能车结构设计:采用浮动式减震,保险杠防碰撞式结构保证稳定性。
(2)跟随部分设计:UWB基站正三角型放置在智能车顶部,符合定位跟随数学模型,便于控制;
(3)避障部分:采用漫反射光电传感器避障,价格便宜,控制简单,安放在车前,但由于检测距离短,因此效果不是很好;
(4)显示部分:采用OLED模块放置在车体角落可以查看车运动速度,既方便又不占空间;
(5)12V探照灯部分;采用12V探照灯,保证智能车在夜间也能工作;
结束语:综上所述,随着现代社会中人工智能的不断发展,促使自动跟随系统应用范围也在不断扩大,例如:机场乘客行李搬运、大型商场智能购物车、大型车间内检验人员工具搬运等。自动跟随系统的出现不仅可以有效实现解放双手,同时也更加便捷,为提高现代人生活质量做出重大贡献。根据上文可看出,在基于UWB技术的自动跟随避障系统进行设计为设计出可推广应用的智能化跟随设备起到推动作用。
参考文献:
[1]曾贵苓,王苹,张玉明. 基于UWB的智能搬运小车[J]. 湖北民族学院学报:自然科学版,2019,037(002):223-227.
[2]叶刚,周庆隆. 多机器人系统中基于环境侧信息的移动任务调度算法[J]. 计算机应用与软件,2019,36(03):301-306.
[3]潘有顺,彭天昊,康万杰. 基于UWB的消防救援定位系统优化设计[J]. 消防科学与技术,2019,038(006):867-870.
[4]申扣明,杨国平. 基于单片机技术的自动循迹避障寻光智能小车系统设计[J]. 自动化应用,2018(09):78-79+85.


















 1368
1368

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











