






了解ppf icp
结果
程序

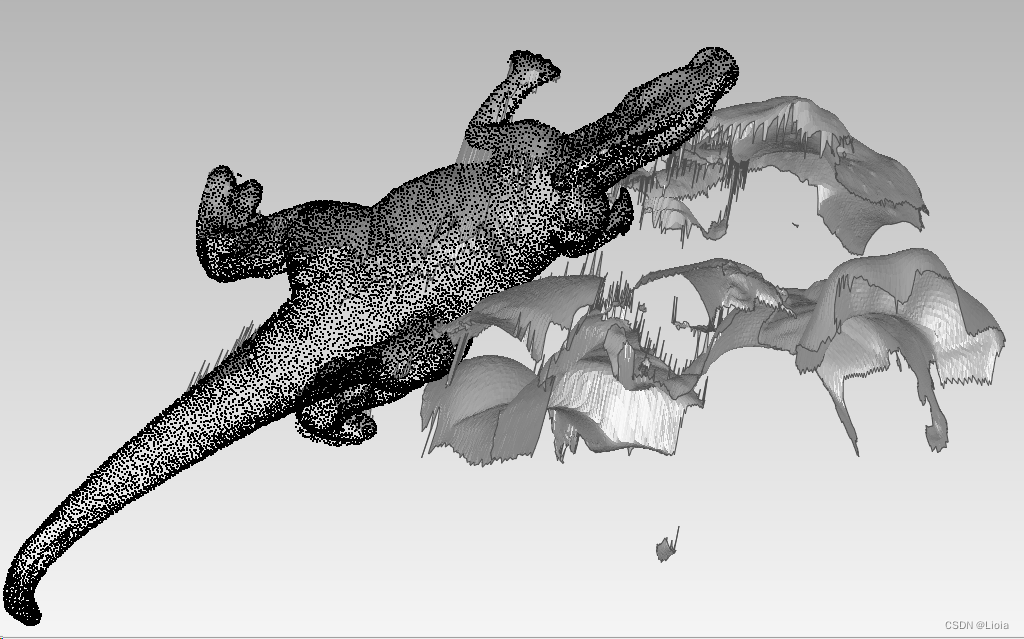
模型
场景模型
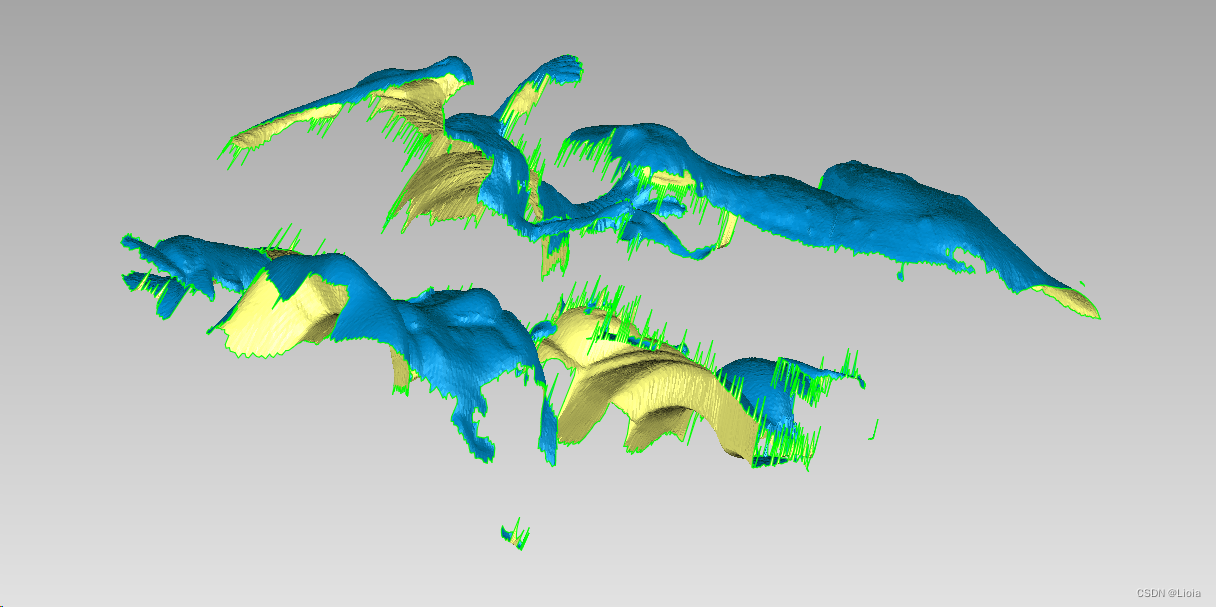
拟合后模型
实现代码
// 讲提取的点云和法相量转化为opencv mat格式
static cv::Mat get_mat(pcl::PointCloud<pcl::PointXYZ>& points, pcl::PointCloud<pcl::Normal>& normals)
{
cv::Mat mat(points.size(),6, CV_32F);
int c;
for (size_t i = 0; i < points.size(); ++i)
{
c = i;
mat.at<float>(i, 0) = points.at(i).x;
mat.at<float>(i, 1) = points.at(i).y;
mat.at<float>(i, 2) = points.at(i).z;
mat.at<float>(i, 3) = normals.at(i).normal_x;
mat.at<float>(i, 4) = normals.at(i).normal_y;
mat.at<float>(i, 5) = normals.at(i).normal_z;
}
return mat;
}
static Eigen::Matrix4f get_rt(cv::Matx44d& mat)
{
Eigen::Matrix4f res{};
for (size_t i = 0; i < 4; ++i)
{
res(i, 0) = mat(i, 0);
res(i, 1) = mat(i, 1);
res(i, 2) = mat(i, 2);
res(i, 3) = mat(i, 3);
}
return res;
}
static void ppf_test()
{
using namespace std::string_literals;
// 模型文件opencv源码里有
auto modelPath = "D:\\0tmp\\ppfdata\\parasaurolophus_low_normals2.ply"s;
auto scenePath = "D:\\0tmp\\ppfdata\\rs1_normals.ply"s;
// 使用 pcl读取模型
pcl::PointCloud<pcl::PointXYZ>::Ptr modelCloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::Normal>::Ptr modelCloudNormals(new pcl::PointCloud<pcl::Normal>);
pcl::PointCloud<pcl::PointXYZ>::Ptr sceneCloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::Normal>::Ptr sceneCloudNromals(new pcl::PointCloud<pcl::Normal>);
pcl::PLYReader re{};
re.read(modelPath, *modelCloud);
re.read(modelPath, *modelCloudNormals);
re.read(scenePath, *sceneCloud);
re.read(scenePath, *sceneCloudNromals);
cv::Mat sMat = get_mat(*sceneCloud, *sceneCloudNromals);
cv::Mat mMat = get_mat(*modelCloud, *modelCloudNormals);
cv::ppf_match_3d::PPF3DDetector ppf{};
ppf.trainModel(mMat);
std::vector<cv::ppf_match_3d::Pose3DPtr> rt;
double timeStart, timeEnd, timeUse;
timeStart = static_cast<double>(cv::getTickCount());
ppf.match(sMat,rt);
timeEnd = static_cast<double>(cv::getTickCount());
timeUse = (timeEnd - timeStart) / cv::getTickFrequency();
std::cout << std::format("ppf time use{}\n", timeUse);
cv::ppf_match_3d::ICP icp(20);
timeStart = static_cast<double>(cv::getTickCount());
auto res = icp.registerModelToScene(mMat, sMat, rt);
timeEnd = static_cast<double>(cv::getTickCount());
timeUse = (timeEnd - timeStart) / cv::getTickFrequency();
std::cout << std::format("icp res{}, time use{}\n", res, timeUse);
Eigen::Matrix4f pose = get_rt(rt[0]->pose);
pcl::PointCloud<pcl::PointXYZ>::Ptr targetPoints(new pcl::PointCloud<pcl::PointXYZ>);
pcl::transformPointCloud(*modelCloud, *targetPoints, pose);
pcl::PLYWriter pw{};
// 对模型文件应用rt时期能拟合场景
pw.write("D:\\MoveModel.ply", *targetPoints);
}














 2278
2278











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









