







 本文介绍了如何使用OpenCV的inRange函数,通过RGB、HSV和CIELab颜色空间的阈值算子,将彩色图像转换为黑白二值图像,以突出显示特定颜色。文章详细讲解了三种颜色空间的特点及其在实际应用中的优缺点。
本文介绍了如何使用OpenCV的inRange函数,通过RGB、HSV和CIELab颜色空间的阈值算子,将彩色图像转换为黑白二值图像,以突出显示特定颜色。文章详细讲解了三种颜色空间的特点及其在实际应用中的优缺点。
一、引言:
在图像处理中,我们往往需要提取图像的一些关键信息,比如本篇文章的内容——提取颜色,然而当我们需要提取某一种颜色时,无论图像余下的部分如何“丰富多彩”,他们都不再重要,需要被忽略,我们称其为“背景”。此时我们只需要黑白图像就可以清晰的展示出需要提取的颜色。我们往往将每个像素点的灰度值转换为0或1,表示黑色或白色,从而将图像转换为黑白二色,这样的图像被称为二值化图像。
借助 OpenCV 的 inRange 函数我们就可以根据阈值提取满足条件的像素。
二、RGB 颜色阈值算子
1 RGB空间:
还记得第一篇文章提到的张量么,一张彩色图片可以看作一个三阶张量,即一张彩色图像是由红,绿,蓝三张图片叠加成的,每张图片的有无数的像素点,每个像素点的值域为0~255来表示颜色深浅。这就是最常用的三通道颜色空间,RGB空间。
2 代码实现:
import cv2
import numpy as np
def color_threshold(image, lower_threshold, upper_threshold):
"""
RGB颜色阈值算子
参数:
- image: 输入的RGB图像
- lower_threshold: 低阈值,为一个包含三个元素的列表或元组,分别对应BGR通道的最小值
- upper_threshold: 高阈值,为一个包含三个元素的列表或元组,分别对应BGR通道的最大值
返回值:
- thresholded_image: 经过阈值处理后的二值图像
"""
# 使用OpenCV的inRange函数根据阈值提取满足条件的像素
thresholded_image = cv2.inRange(image, np.array(lower_threshold), np.array(upper_threshold))
return thresholded_image
# 主函数
if __name__ == "__main__":
# 读取输入图像
input_image = cv2.imread("leaf.jpg")
# 定义颜色阈值
lower_threshold = [0, 100, 0] # 低阈值,例如,过滤掉B通道小于0,G通道小于100,R通道小于0的像素
upper_threshold = [50, 255, 50] # 高阈值,例如,过滤掉B通道大于50,G通道大于255,R通道大于50的像素
# 应用颜色阈值算子
thresholded_image = color_threshold(input_image, lower_threshold, upper_threshold)
# 显示原始图像和处理后的二值图像
cv2.imshow("Original Image", input_image) # imshow用于新建弹窗显示图像
cv2.imshow("Thresholded Image", thresholded_image)
cv2.waitKey(0) # 保留弹窗直至检测到其他键盘操作
cv2.destroyAllWindows()
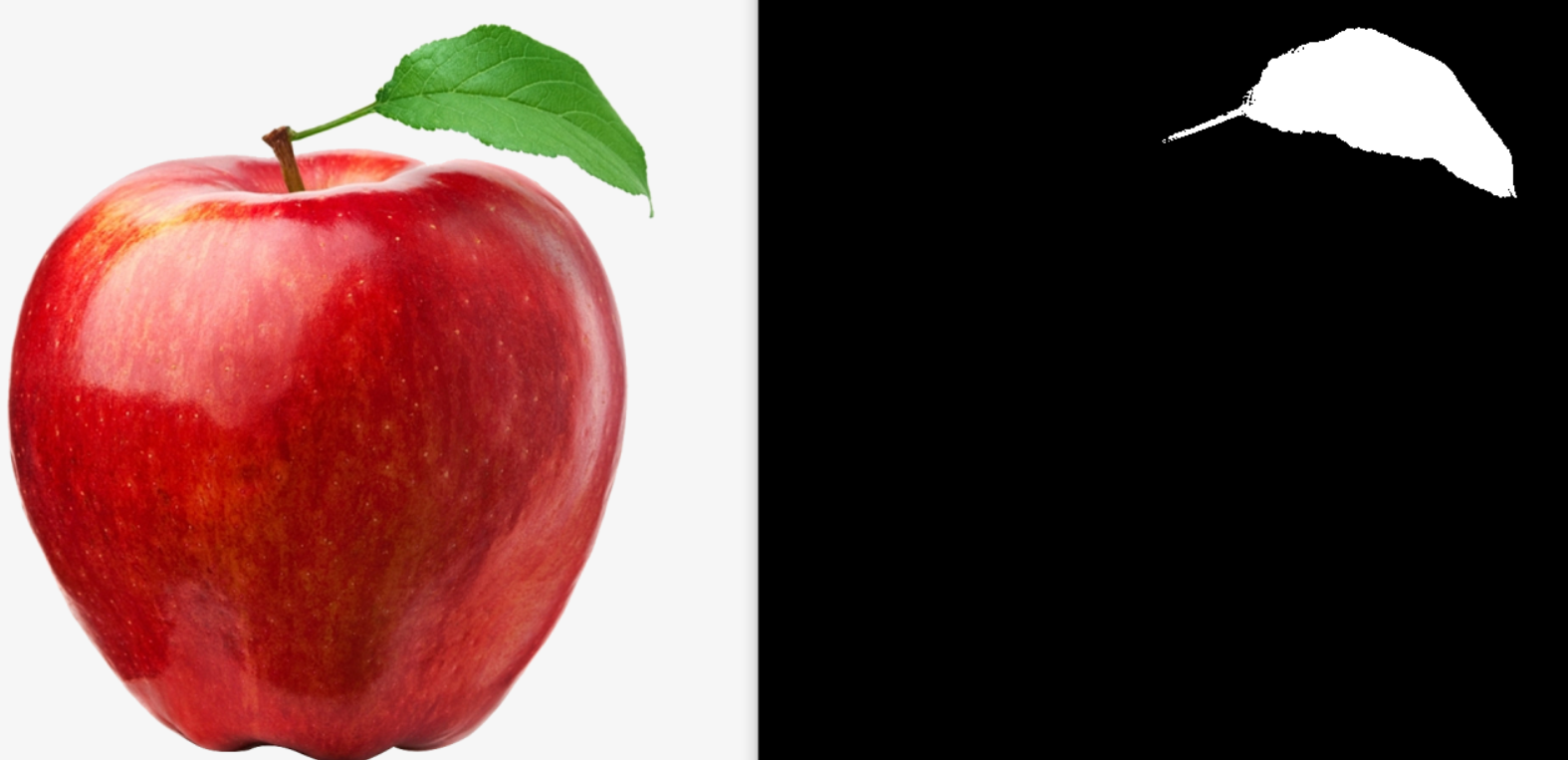
3 运行结果:

三、HSV 颜色阈值算子
1 HSV空间:
HSV空间指的是色彩空间中的一种,由色相(Hue)、饱和度(Saturation)和明度(Value)三个要素组成。色相表示颜色的基本属性,饱和度表示颜色的纯度或深浅程度,而明度则表示颜色的亮度。
2 代码实现:
import cv2
import numpy as np
def hsv_threshold(image, lower_hsv, upper_hsv):
"""
使用HSV颜色空间进行颜色阈值分割
参数:
image: 输入的RGB图像
lower_hsv: HSV颜色空间下的下限阈值,格式为(H_MIN, S_MIN, V_MIN)
upper_hsv: HSV颜色空间下的上限阈值,格式为(H_MAX, S_MAX, V_MAX)
返回:
thresholded_image: 分割后的二值图像
"""
# 将RGB图像转换为HSV颜色空间
hsv_image = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 设置阈值范围
lower = np.array(lower_hsv)
upper = np.array(upper_hsv)
# 根据阈值进行二值化处理
thresholded_image = cv2.inRange(hsv_image, lower, upper)
return thresholded_image
# 主函数
if __name__ == "__main__":
# 读取图像
image = cv2.imread("apple.jpg")
# 定义想要提取的HSV颜色范围
lower_colour = (40, 100, 100)
upper_colour = (80, 255, 255)
# 使用阈值算子分割图像
colour_threshold = hsv_threshold(image, lower_colour, upper_colour)
# 显示原始图像和分割后的图像
cv2.imshow("Original Image", image) # imshow用于新建弹窗显示图像
cv2.imshow("colour Threshold", colour_threshold)
cv2.waitKey(0) # 保留弹窗直至检测到其他键盘操作
cv2.destroyAllWindows()
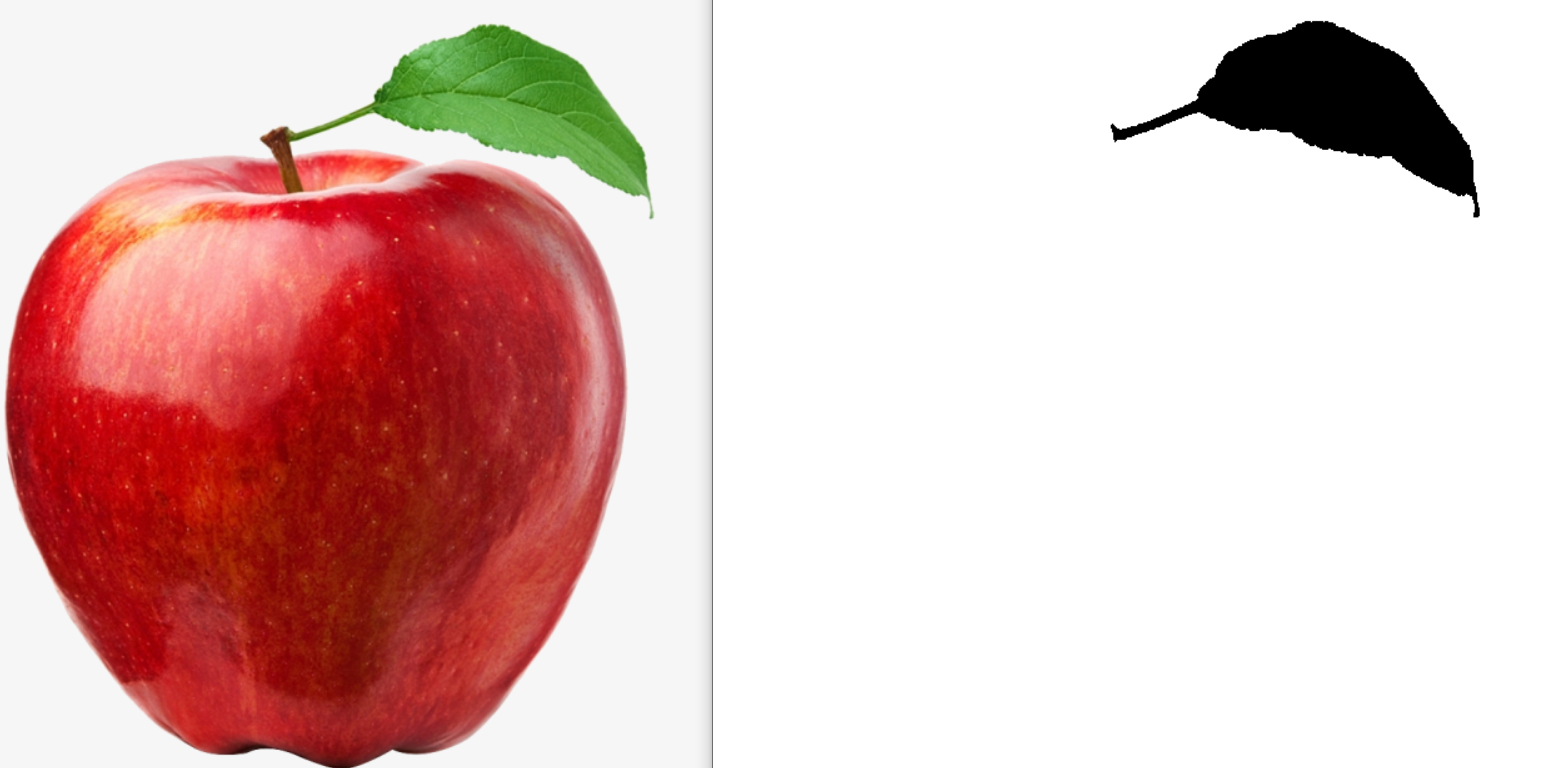
3 运行结果:
四、CIE Lab 颜色阈值算子
1 lab空间:
LAB空间是一种色彩空间,也称为CIE LAB色彩空间。它包含三个坐标轴:L表示亮度(Lightness),a表示从洋红色(红色的负轴)到绿色(绿色的正轴)的范围,b表示从蓝色(蓝色的负轴)到黄色(黄色的正轴)的范围。
2 代码实现:
import numpy as np
import cv2
def lab_color_threshold(image, lower_bound, upper_bound):
"""
使用CIE Lab颜色空间进行阈值分割
参数:
image: 输入的RGB图像
lower_bound: 一个包含3个元素的列表,表示颜色的下界(L, a, b)
upper_bound: 一个包含3个元素的列表,表示颜色的上界(L, a, b)
返回:
thresholded: 二值图像,仅包含在指定颜色范围内的区域
"""
# 将RGB图像转换为CIE Lab颜色空间
lab_image = cv2.cvtColor(image, cv2.COLOR_BGR2LAB)
# 提取L、a、b通道
L, a, b = cv2.split(lab_image)
# 创建空的二值图像
thresholded = np.zeros_like(L)
# 将颜色通道与阈值进行比较,生成二值图像
within_bounds = (lower_bound[0] <= L) & (L <= upper_bound[0]) & \
(lower_bound[1] <= a) & (a <= upper_bound[1]) & \
(lower_bound[2] <= b) & (b <= upper_bound[2])
# 将满足条件的像素设置为255(白色)
thresholded[within_bounds] = 255
return thresholded
# 主函数
if __name__ == "__main__":
# 读取图像
image = cv2.imread("apple.jpg")
# 设置阈值范围(这里使用的是示例值,你可以根据需要调整)
lower_bound = [0, 128, 128] # L, a, b 的下界
upper_bound = [255, 255, 255] # L, a, b 的上界
# 应用颜色阈值算子
thresholded_image = lab_color_threshold(image, lower_bound, upper_bound)
# 显示结果
cv2.imshow("Original Image", image) # imshow用于新建弹窗显示图像
cv2.imshow("Thresholded Image", thresholded_image)
cv2.waitKey(0) # 保留弹窗直至检测到其他键盘操作
cv2.destroyAllWindows()
3 运行结果:
五、优缺点对比
1 RGB优缺点:
(1)优点:
- 直接对应于显示器和相机的工作原理,易于理解和实现。
- 在处理彩色图像时,RGB是一种直观的颜色表示方式。
(2)缺点:
- RGB模型对光照和阴影等因素较为敏感,不太适合于需要考虑光照条件的任务。
- RGB模型下的颜色值不够直观,不易于对颜色的特性进行准确描述。
- 某些情况下,RGB模型下的颜色空间变换不够灵活,无法有效地处理一些特定的颜色操作。
2 HSV优缺点:
(1)优点:
- HSV模型更符合人类对颜色的感知,色相、饱和度和明度的概念更直观。
- 色相分量可以独立于光照条件而保持不变,因此HSV对光照条件的影响较小。
- 在某些任务中,如颜色识别和区分不同颜色的对象,HSV模型可能更有效。
(2)缺点:
- HSV模型的计算量较大,不够简洁高效,对计算资源要求较高。
- HSV模型不是设备无关的,可能会受到设备性能和环境光照的影响。
- 在一些情况下,HSV模型下的颜色分布不均匀,可能导致某些区域难以区分或处理。
3 LAB优缺点:
(1)优点:
- LAB模型是一种设备无关的颜色空间模型,颜色值在不同设备和环境下保持一致。
- LAB模型更符合人类视觉系统的感知特性,对颜色的描述更准确。
- LAB模型可以很好地处理颜色校正和颜色匹配等任务。
(2)缺点:
- LAB模型的数学计算较复杂,相比RGB和HSV模型,计算量较大。
- 有时,LAB模型下的颜色表示不够直观,不够直观地反映颜色在图像中的分布情况。
- 由于LAB模型对颜色的描述较为细致,可能会导致在某些情况下对颜色的处理和分析更加复杂。

















 1591
1591

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









