







 本文介绍了如何使用滑模速度控制器(SMC)优化永磁同步电机(PMSM)的速度控制,通过与PI控制器对比,展示了SMC在抗扰动、参数变化下的优势,特别是在快速响应和鲁棒性方面的改进。仿真结果表明,SMC能实现更平滑的速度过渡和更好的动态品质。
本文介绍了如何使用滑模速度控制器(SMC)优化永磁同步电机(PMSM)的速度控制,通过与PI控制器对比,展示了SMC在抗扰动、参数变化下的优势,特别是在快速响应和鲁棒性方面的改进。仿真结果表明,SMC能实现更平滑的速度过渡和更好的动态品质。
引言:(2022/3/14,第一次写博客,不当之处,望留言指正)
永磁同步电机是一个多变量、强耦合、非线性的复杂对象,其速度控制环节普遍采用PI调节器,比例参数Kp和积分参数Ki通常采用经验调参。当控制系统中负载转矩突变、转速突变或电机内部参数发生变化时会导致控制系统的不稳定。因此,为了提高系统的鲁棒性和调速系统的动态品质,本周学习了一种滑模速度控制器。
一、SMC速度控制器的设计
在建模及分析过程中做如下假设:转子永磁磁场在气隙空间分布为正弦波,定子电枢绕组中的感应电动势也为正弦波,认为磁路为先线性,电感参数不受温度的影响,不计铁心涡流,电阻上没有阻尼绕组(1)。以表贴式永磁同步电机为例建立d_q轴坐标系的数学模型如下
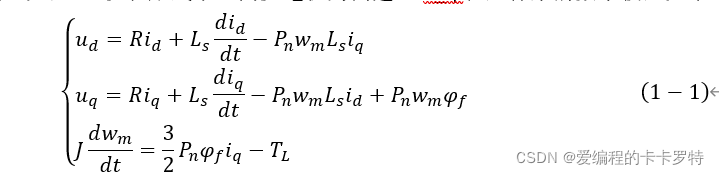
对于表贴式PMSM而言id=0![]() 控制和最大电流比控制是等价的,可以获得较好的控制效果。此时式(1-1)则可以变为如下数学模型:
控制和最大电流比控制是等价的,可以获得较好的控制效果。此时式(1-1)则可以变为如下数学模型:

定义PMSM的系统状态变量:

其中:wref![]() 为电机的参考转速,通常为一常量;wm
为电机的参考转速,通常为一常量;wm![]() 为机械转速。根据式(1-2)和(1-3)可知
为机械转速。根据式(1-2)和(1-3)可知


![]()
为了保证三相PMSM驱动系统具有好的动态品质,这里采用指数趋近律方法,可得表达式为
![]()
![]()

由滑膜到达条件ss<0![]() ,容易验证控制器在式(1-7)的作用下,系统是渐近稳定的。
,容易验证控制器在式(1-7)的作用下,系统是渐近稳定的。
二、仿真建模
SMC速度环控制策略如图2-1所示。仿真模型主要包括表贴式PMSM电机、SVPWM模块、电流环节调节器、速度环节调节器。其中SMC作为速度环节的控制器,其作用是得到iq![]() 轴的给定值。为了验证SMC对扰动与参数不敏感,速度响应快等优点,将SMC速度控制策略与PI速度环控制策略进行比较分析建模。
轴的给定值。为了验证SMC对扰动与参数不敏感,速度响应快等优点,将SMC速度控制策略与PI速度环控制策略进行比较分析建模。
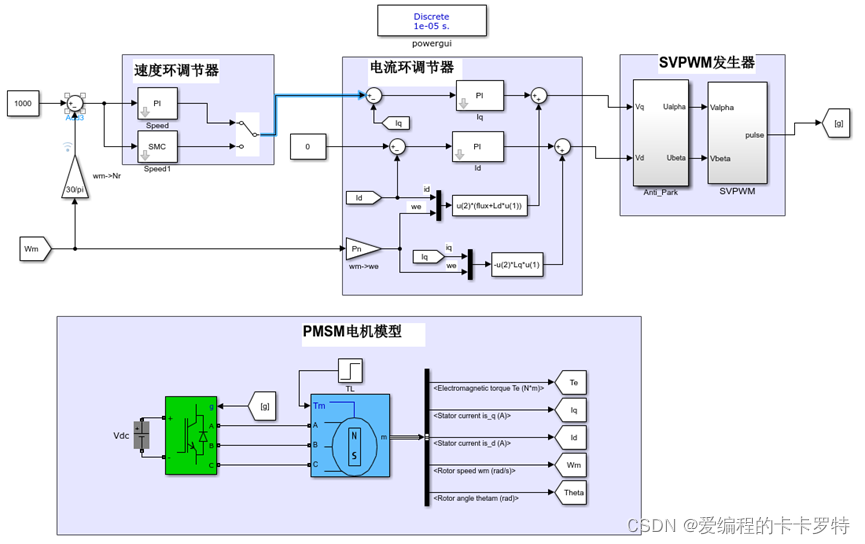
图2-1 SMC速度环控制策略仿真模型
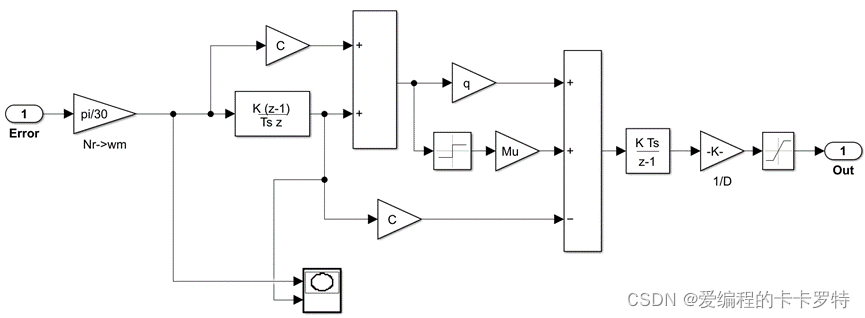
图2-2 SMC仿真模型
三、仿真结果及分析
图3-1的(a)、(b)分别为PI控制和SMC控制下系统相平面上的状态轨迹图。在PI控制下,系统是按螺旋线渐近趋向原点,这是系统启动过程速度有超调和震荡引起的;在SMC控制下系统能够较快的达到设定的滑膜线,并沿滑模线到达原点,即该系统的稳定点。
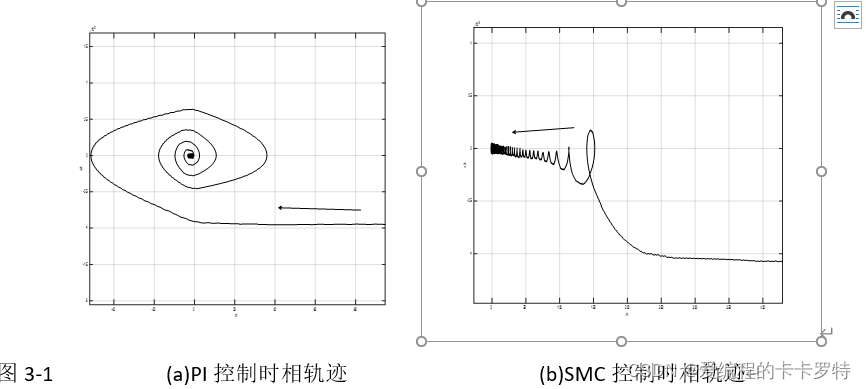
图3-2是启动及变速性能验证,曲线①②分别为PI和SMC控制下速度波形。在负载一定时,设初始速度为1000r/min,系统在0.1时改变目标速度为2000r/min。系统两种启动模式响应速度一致,但是在趋近目标速度的过程是有很大的差别。SMC模式在趋近目标速度时相比PI模式更加平滑,几乎不存在抖动的现象。
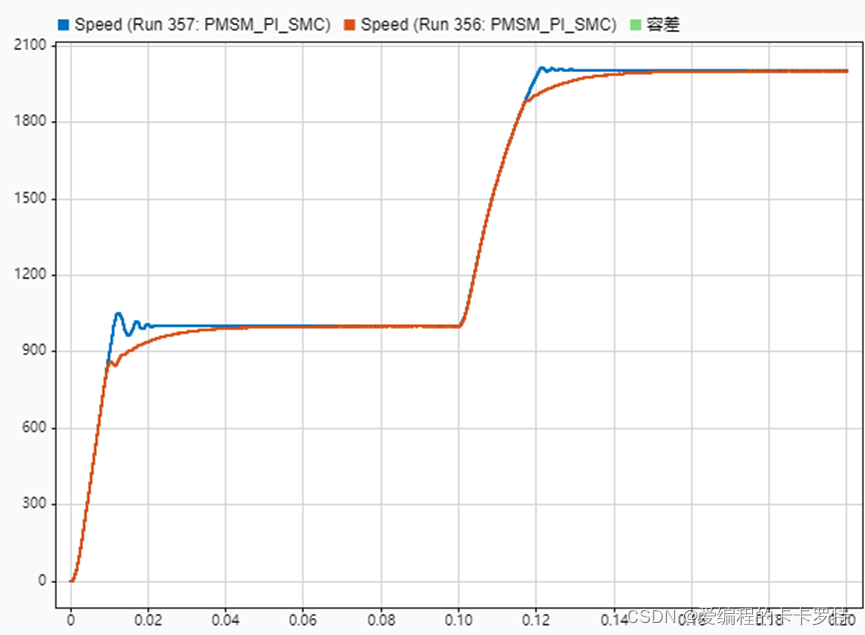
图3-2 PI和SMC控制策略转速变化对比分析
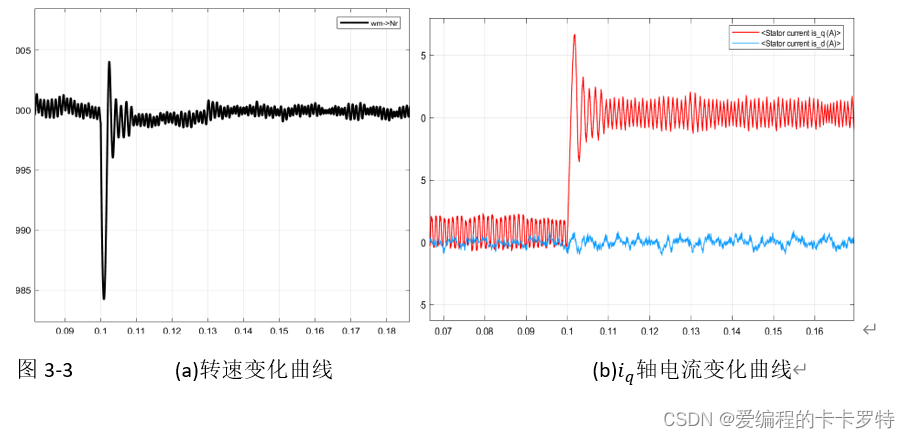
图3-3(a)和(b)是SMC控制策略下0.1s时突加负载时速度和iq![]() 轴电流的变化波形。负载在0.1s时增加10N.M的过程速度跌落16r/min并在10ms的时间内恢复到1000r/min。转矩也在10ms的时间内从0N.M升到10N.M。
轴电流的变化波形。负载在0.1s时增加10N.M的过程速度跌落16r/min并在10ms的时间内恢复到1000r/min。转矩也在10ms的时间内从0N.M升到10N.M。

















 986
986

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









