








第一章
操作臂
- 连杆
- 关节
- 转动关节:转动关节位移称为关节角
- 移动关节:移动关节位移称为关节偏移量
- 自由度:操作臂自由度取决于操作臂中具有独立位置变量的数目,由于操作臂多为开式运动链,而且每个关节位置都由唯一一个变量来定义,因此关节数目等于自由度数目。
- 末端执行器:操作臂的运动链的自由端
- 工具坐标系:设置于末端执行器上的坐标系
- 基坐标系:设置于操作臂固定底座的坐标系
正运动学问题
- 给定一组关节角,计算工具坐标系相对于基坐标系的位置和姿态
逆运动学问题
- 给定末端执行器(工具坐标系)的位置和姿态,求所有可达到给定位置和姿态的关节角
工作空间
- 运动学方程解的有无定义了操作臂的工作空间,无解表示操作臂不能达到这个期望位置和姿态
样条函数
- 样条函数表示通过一系列路径点的连续函数
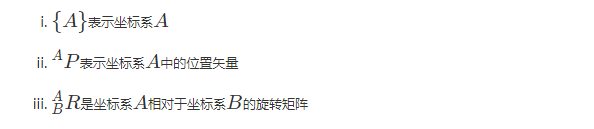
符号表示















 276
276











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









